 電子發燒友App
電子發燒友App


雖然與數學庫的原始計算相比,算法的速度有了明顯的改善,但客戶需要的是速度快得多的實現。不過前文所述的最后一步給我們提供了一種能夠輕松轉向硬件實現的方法。
這種實現方法需要某些用于拆分 xi值的運算。要在硬件中做到這一點,只需將所需的位進行連接即可。然后我們需要三個表;我們使用以我們的PC模型計算出的預定義值推導出ROM,然后將其轉入IP的VHDL代碼中。該IP能夠一次讀取所有三個表,從而能夠再度節省時間。最后,我們需要進行一次浮點MUL和一次浮點ADD運算。
對于該任務,我們發現用于浮點運算的CORE GeneratorTM模塊非常適合。
?

?
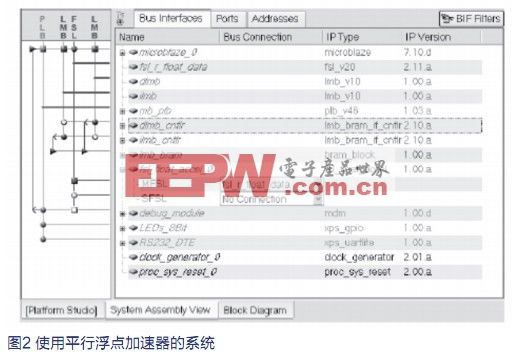
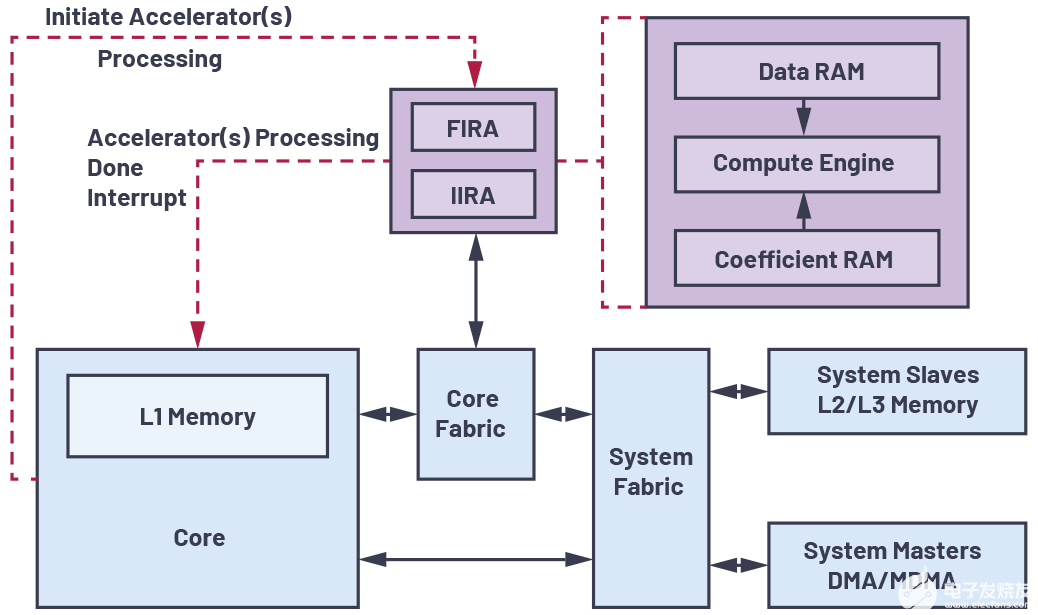
圖 3 — 無流水線功能的加速器 IP
我們使用一些Slice和乘法器,對這些硬件模塊中的兩個進行例化。兩個內核都要求4到5個周期的延遲,以匹配我們設計的時序要求。延遲在此不是什么問題,我們將在下面的步驟中進行討論。
我們將最終的IP以MicroBlaze的快速單工鏈路 (FSL) IP 的形式進行實現。對時序的第一次估算結果表明:
? 將數據從MicroBlaze傳輸到FSL總線需用一個時鐘周期
? 將數據從FSL總線傳輸至FSL IP(當正弦計算的自變量從FSL總線讀出時,將立即從BRAM讀取數據,因而無需時鐘周期)需用一個時鐘周期
? 完成MUL運算 (cos(x)*sin(d)) 需用四個時鐘周期
? 將方程的結果存儲到寄存器中需用一個時鐘周期
? 完成ADD運算需用四個時鐘周期
? 將數據發送回FSL總線需用一個時鐘周期
? MicroBlaze從FSL IP讀取數據需用一個時鐘周期。
請注意,在沒有使用任何額外流水線(我們將在下一步驟中討論這一點)的情況下,自變量數據在整個過程中必須保持穩定。這就意味著MicroBlaze僅能請求一次正弦計算,且必須讀取該值,然后至少要等上13個時鐘周期,才能請求下一次計算。
因此,我們估計進行該實現需要13個時鐘周期。當然,要處理軟件上的函數調用以及某些其他運算,還需要更多的時鐘周期。
我們簡單地把一些標準時鐘組合在一起,不到一天就實現了該IP,隨即在硬件中對該算法進行測量。整個算法(軟硬件混合)耗用了360個時鐘周期(包括所有的函數調用)。雖然這已是顯著的進步,但是仍不足以充分滿足客戶的需求。
在我們的加速器IP處理所有數據之前,我們使用一個SRL16來延遲信號的寫入。
雖然該算法現在可與我們的MicroBlaze并行運行,但它每次只能計算一個值。
步驟六:添加流水線和適配客戶代碼
設計到了這一步,我們就可以開始向我們的內核添加流水線。浮點ADD和浮點MUL的CORE Generator模塊已采用流水線實現,因而我們在此無需再做什么。第一個版本的算法要求自變量保持恒定,直至計算完成。在開始新計算之前(自變量數據到達FSL IP內部),立刻讀取兩個BRAM并執行浮點MUL。運算的結果在數個時鐘周期后生效。
我們的 sin(xi) 的自變量 xi 是一個20位寬的整數,它分為 x 和 d 兩個部分。因此,我們必須對自變量 xi的MSB部分 x 進行幾個時鐘周期的延遲,以讀取 BRAM 的內容,存儲自變量xi,并將其與MUL運算的結果相匹配。
我們為我們的10位寬數值使用了少量SRL16元件(總共 10 個),共占用了10個LUT(但由于Spartan-6具有LUT組合功能,如果采用該器件較寬的LUT6結構,則僅需 5 個 LUT 即可)。
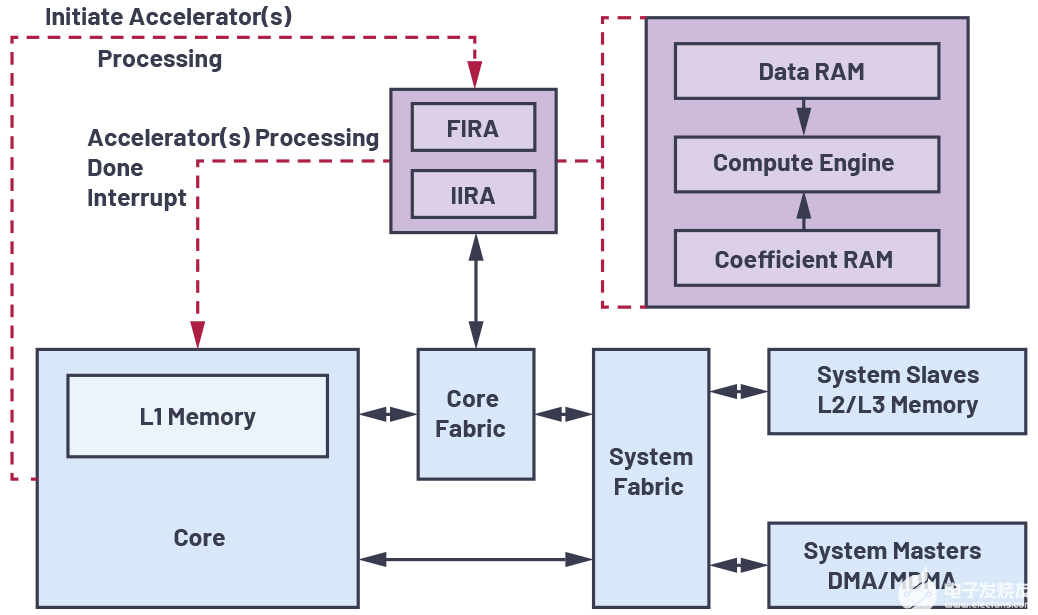
最后的工作量相當小。在圖4中已對增加的SRL16x10位用紅圈進行了標注。
?

?
圖 4:帶流水線的加速器內核
然后我們使用EDK向導來修改我們的FSL總線FIFO,以便存儲多個值(我們確定能夠存儲8個值就足以達到我們的目的,但可根據需要輕松增加更多)。
這就意味著我們的客戶甚至在請求第一個結果之前即能獲得多達8個值。這足以滿足我們客戶當前的需求,但如果想請求更多正弦值的話,則可以輕松將FIFO緩沖參數擴展為較大的值。
我們在與客戶討論這種新的方案時,發現可將正弦計算進一步劃分為兩個部分:
1. 請求正弦計算(fslput 運算)
2. 請求正弦計算的結果(fslget運算)
由于我們在運算中有一個固定時延,所以如果這兩個運算依次銜接、緊密地按順序執行,那么MicroBlaze將停頓,并等待FSL IP完成對請求的處理。如果能夠將這兩組運算分開(這在客戶的算法中是可以的),那么我們即可進一步提
升運算的總體速度。通過增加流水線, 在MicroBlaze上執行的最終代碼如下:
putfsl(arg1,fsl1_id);
putfsl(arg2,fsl1_id);
putfsl(arg3,fsl1_id);
putfsl(arg4,fsl1_id);
putfsl(arg5,fsl1_id);
putfsl(arg6,fsl1_id);
putfsl(arg7,fsl1_id);
putfsl(arg8,fsl1_id);
...
getfsl(result1,fsl1_id);
getfsl(result2,fsl1_id);
getfsl(result3,fsl1_id);
getfsl(result4,fsl1_id);
getfsl(result5,fsl1_id);
getfsl(result6,fsl1_id);
getfsl(result7,fsl1_id);
getfsl(result8,fsl1_id);
這給我們帶來了顯著的優勢。內核不僅可完全實現流水線功能,而且還能夠將正弦計算的兩個調用分開。IP核的時延依然存在,但不再明顯。MicroBlaze也不再發生停頓和等待未完成的IP計算的情況,從而提高了整體性能。
客戶同意對代碼進行相應調整,這對客戶來說只是小量工作。通過使用C語言的宏命令取代函數調用,我們就能夠把所有要求的調用插入代碼庫中。
?

?
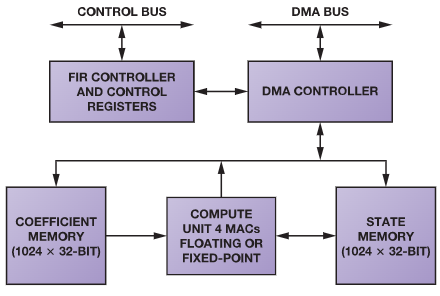
圖 5 - EDK為FSL總線實現了深度為 8 的 FIFO 以提升流水線的性能
最終實現的算法一次計算只需要四個時鐘周期。處理的總體時延不再明顯,而被調用的劃分以及結果請求所隱藏。另外,整體IP需要一些額外的BRAM(需為我們的三個表增加六個BRAM)和一定數量的乘法器或DSP Slice以及一些其他Slice。
但結果非常令人吃驚。我們的MicroBlaze現在就能夠如同超高端處理器內核一樣運行,而且其運行頻率仍然相當低(現在比原來的正弦計算約快9,600 倍)。
步驟七:進一步優化?
當我們達到這種實現水平時,我們的客戶對結果感到非常滿意,并且我們也完成了加速器IP方面的工作。速度和精度都非常不錯。
當然,還有一項最終優化需要完成。如果我們在d值非常小的情況下對sin(d) 值進行考察,算法還可以進一步完善:
sin(d) = ~d
若d值小于2*π/1024,即小于0.0061359,那么總體誤差則小于 1E-8(針對有 1,024 個值的表)。
我們算法的最后步驟將為:
sin(x+d) = sin(x) + cos(x) * d
這樣只會存在非常小的額外誤差,但我們可以去掉第三個表。當然,我們必須保留 fadd 和 fmul運算器。雖然我們還可以通過其他方式來計算浮點值的正弦值,但這種方案充分顯示了增添硬件加速器的強大功能。我們的開發經歷表明,你們無需為了將含有浮點計算的算法在硬件中實現而擔心。




















 工商網監
工商網監
評論