 電子發(fā)燒友App
電子發(fā)燒友App


?
1 引言
鋰電池極片壓延輥壓機(jī)如圖片1所示。壓延鋼棍把薄厚不均的電池極片卷材經(jīng)過(guò)壓軋制得高密度均質(zhì)級(jí)片材料,提高電池的容量。在壓延鋼輥的兩側(cè)分別有一個(gè)控制“斜鐵”的伺服系統(tǒng),“斜鐵”的作用是控制軋輥的位置,是保證軋制工藝的基礎(chǔ)。根據(jù)軋輥位置調(diào)整軋制液壓,控制軋輥在極片上面的軋制壓力值。傳統(tǒng)的 “斜鐵”是采用步進(jìn)電機(jī)伺服系統(tǒng)控制方式,控制精度受到限制,極片上面的壓力完全靠人工經(jīng)驗(yàn)來(lái)判斷和實(shí)現(xiàn)液壓調(diào)整。
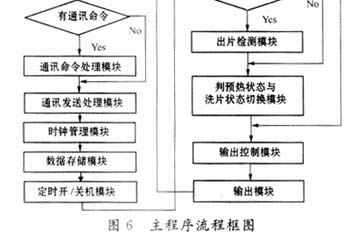
2 系統(tǒng)設(shè)計(jì)
整個(gè)機(jī)器的工作是控制張力的收放卷流程。關(guān)于收放卷橫張力控制部分采用臺(tái)達(dá)BW系列變頻器,已經(jīng)測(cè)試成功,本文著重介紹20PM運(yùn)動(dòng)控制器應(yīng)用部分。
2.1 工藝技術(shù)指標(biāo)
(1)保持極片在收卷的過(guò)程中保持張力恒定。
(2)保證斜鐵走位的準(zhǔn)確,壓力給定的準(zhǔn)確。
(3)最高線速度為30米/分,最低線速度為0米/分。
2.2 系統(tǒng)原理設(shè)計(jì)
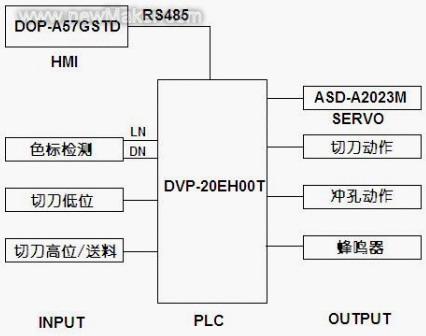
極片壓延輥壓機(jī)自動(dòng)化系統(tǒng)基于臺(tái)達(dá)機(jī)電技術(shù)平臺(tái)。配套PLC包括主機(jī)DVP16EH00T2和擴(kuò)展模塊DVP-20PM00D;DVP04AD-H2;DVP04DA-H2;DVP08SN。觸摸屏人機(jī)界面DOP-A10THTD。系統(tǒng)架構(gòu)如圖2所示。
PLC控制器DVP16EH00T2主要是實(shí)現(xiàn)對(duì)從站模塊的控制,通過(guò)自身的數(shù)字量的點(diǎn)和20PM所帶的數(shù)字量點(diǎn)實(shí)現(xiàn)對(duì)收卷、放卷、報(bào)警、整機(jī)啟動(dòng)、整機(jī)停止、切邊、糾偏控制器等多個(gè)點(diǎn)的控制。DVP-20PM00D運(yùn)動(dòng)控制器完成對(duì)兩軸伺服“斜鐵”的精確控制,模擬量模塊是實(shí)現(xiàn)液壓部分電壓信號(hào)的采集,然后通過(guò)PLC處理后再輸出控制。
2.3運(yùn)動(dòng)控制模塊簡(jiǎn)介
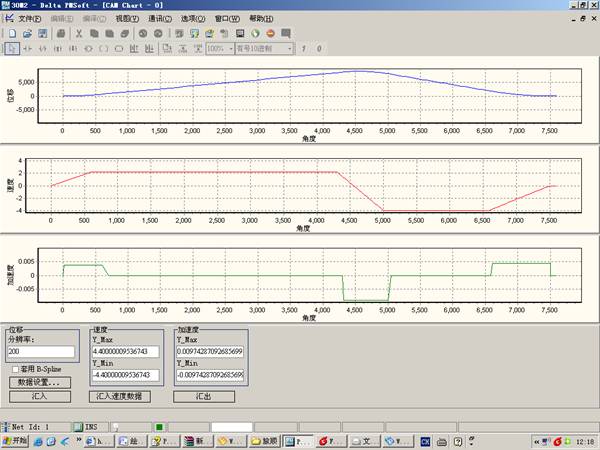
臺(tái)達(dá)DVP-20PM00D運(yùn)動(dòng)控制擴(kuò)展模塊的最大特點(diǎn)是直接提供電子凸輪功能,或者說(shuō)DVP-20PM00D是內(nèi)置電子凸輪功能的PLC,所以有些場(chǎng)所直接稱呼DVP-20PM00D為臺(tái)達(dá)20PM運(yùn)動(dòng)控制器。選擇20PM的原因就是因?yàn)?0PM是專用的運(yùn)動(dòng)控制模塊,這塊模塊不但同時(shí)可以控制雙伺服,而且有雙手搖輪輸入,并且模塊本體還帶有8入8出的數(shù)字量控制點(diǎn)等諸多因素,這樣可以大幅度提升產(chǎn)品在市場(chǎng)上的競(jìng)爭(zhēng)能力。
臺(tái)達(dá)DVP-20PM00D采用高速雙CPU結(jié)構(gòu)形式,利用獨(dú)立CPU處理運(yùn)動(dòng)控制算法,可以很好地實(shí)現(xiàn)各種運(yùn)動(dòng)軌跡控制、邏輯動(dòng)作控制,直線/圓弧插補(bǔ)控制,并且可以接入手搖輪,高速脈沖輸出可以達(dá)到500KHZ,可以作為主機(jī)也可以作為從機(jī),靈活性更高。
3 運(yùn)動(dòng)控制編程設(shè)計(jì)
3.1 卷材牽引
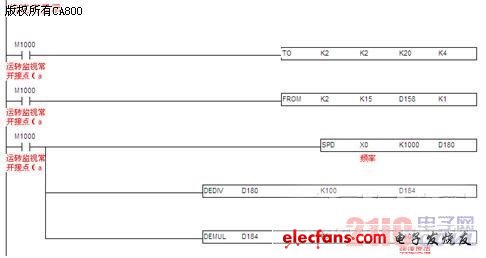
主牽引傳動(dòng)采用VFD370B43B變頻器實(shí)現(xiàn)。變頻器的DFM數(shù)字頻率輸出,通過(guò)PLC的SPD指令采集變頻器的工作頻率,然后在程序里面轉(zhuǎn)換成單位為“米/分鐘”的數(shù)據(jù)從而達(dá)到在人機(jī)界面上面的顯示:
程序部分如下:
?
3.2 長(zhǎng)度計(jì)量
整個(gè)設(shè)備在正式生產(chǎn)運(yùn)行的時(shí)候是必須對(duì)電池極片進(jìn)行測(cè)量的,對(duì)此采用一個(gè)0.1米/脈沖的類似編碼器的計(jì)米器,安裝在張力浮動(dòng)輥上面,從而實(shí)現(xiàn)自動(dòng)計(jì)量長(zhǎng)度。
計(jì)米器程序如下:

?
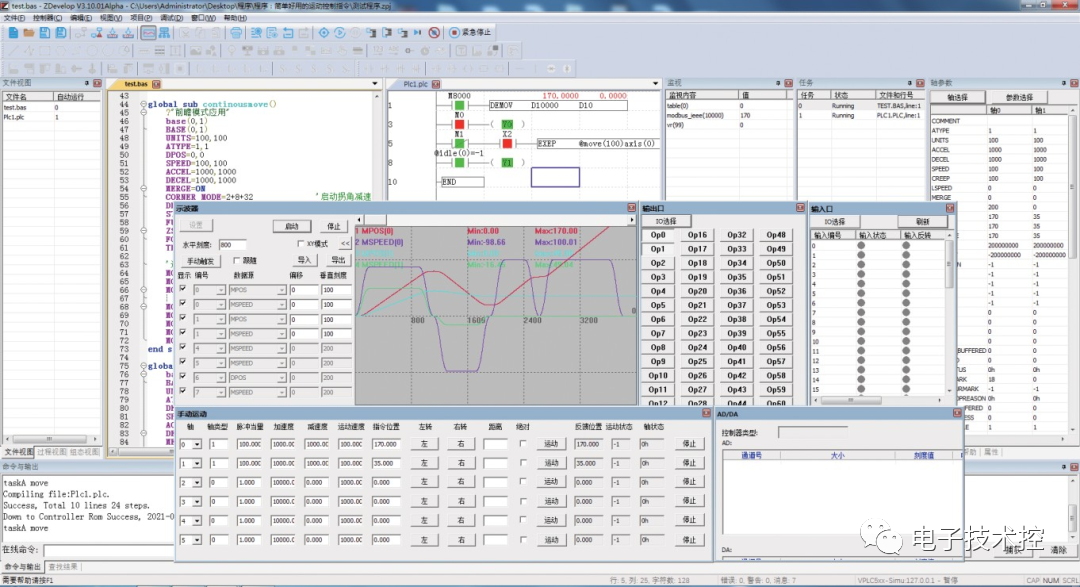
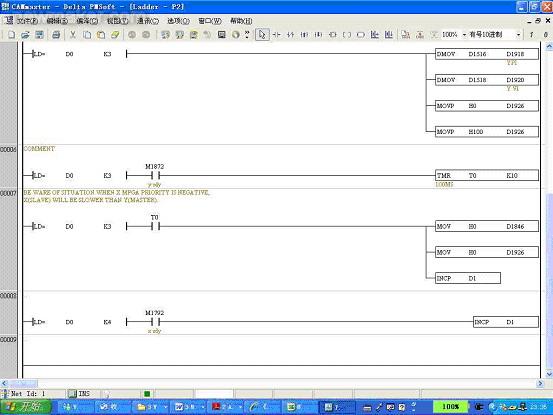
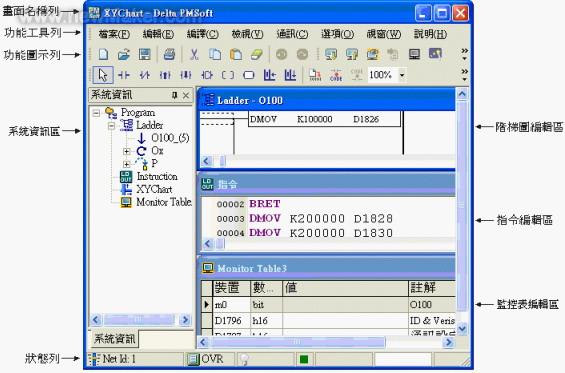
3.3 20PM運(yùn)動(dòng)控制初始化
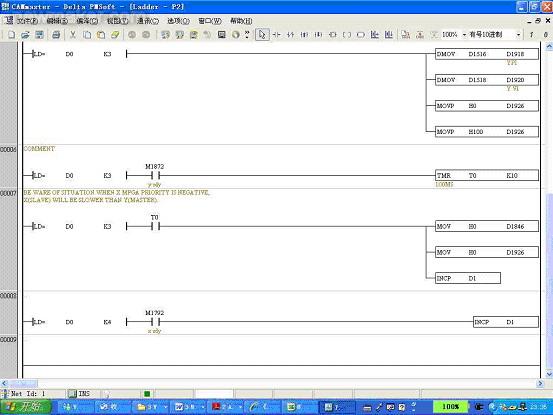
20PM的初始化和部分程序如下:

?
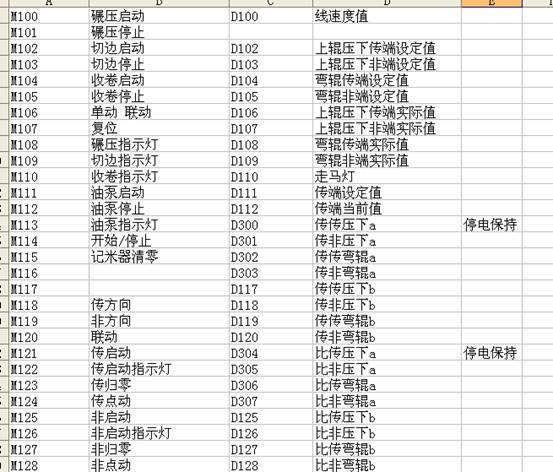
20PM地址定義如下:

?

?
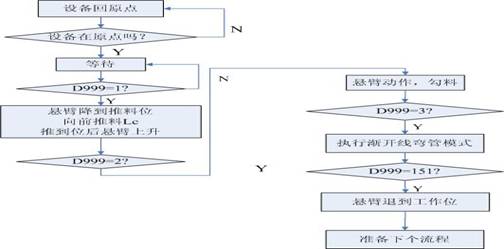
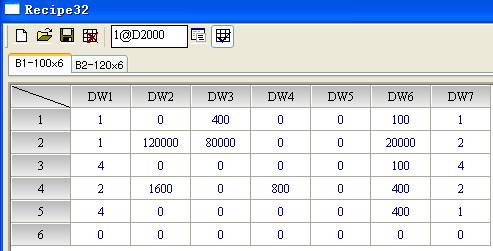
在設(shè)備的傳動(dòng)側(cè),可以實(shí)現(xiàn)對(duì)2臺(tái)伺服的聯(lián)動(dòng)控制和單獨(dú)控制,暫時(shí)客戶由于經(jīng)費(fèi)原因暫時(shí)沒(méi)有使用手搖輪,在后續(xù)機(jī)型當(dāng)中會(huì)把手搖輪加上去,這樣單獨(dú)控制會(huì)更加簡(jiǎn)單。伺服的行走距離可以通過(guò)觸摸屏上面進(jìn)行設(shè)置,可以通過(guò)觸摸屏顯示當(dāng)前行走距離,可以顯示當(dāng)速度,可以通過(guò)“歸零”按鈕實(shí)現(xiàn)對(duì)單個(gè)伺服的回原點(diǎn)控制。可以通過(guò)配方功能把伺服的一些參數(shù)提前寫入到觸摸屏里面,隨時(shí)根據(jù)情況進(jìn)行調(diào)整。
3.4 20PM應(yīng)用經(jīng)驗(yàn)
20PM運(yùn)動(dòng)控制器程序設(shè)計(jì)的關(guān)鍵在于熟悉產(chǎn)品控制重點(diǎn),在軟件方面要充分理解20PM里面的特殊寄存器和CR特殊寄存器之間的關(guān)系,這一點(diǎn)在剛剛接觸20PM運(yùn)動(dòng)控制模塊的時(shí)候會(huì)經(jīng)常出現(xiàn)的問(wèn)題。在程序設(shè)計(jì)的難點(diǎn)主要集中在“主程序”、“副程序”、“運(yùn)動(dòng)副程序”三者之間的關(guān)系,否則會(huì)出現(xiàn)不能正常控制的現(xiàn)象。對(duì)于這一點(diǎn),必須認(rèn)真參看使用說(shuō)明書。
4 結(jié)束語(yǔ)
目前該系統(tǒng)已正式投產(chǎn)使用,客戶已經(jīng)提供給深圳比亞迪公司1套,其余4套正在生產(chǎn)中。此外,DVP20PM00D在其它機(jī)電一體化制造領(lǐng)域完全有能力適應(yīng)復(fù)雜的要求,這些行業(yè)例如:手機(jī)生產(chǎn)線的涂膠機(jī)、包裝機(jī)行業(yè)中的飛剪、機(jī)床行業(yè)中的飛鋸、印刷機(jī)行業(yè)中的電子軸裁切及套印、紡機(jī)行業(yè)中的精密絡(luò)筒繞線等等。
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論