 電子發燒友App
電子發燒友App


3.2 長度計量




整個設備在正式生產運行的時候是必須對電池極片進行測量的,對此采用一個0.1米/脈沖的類似編碼器的計米器,安裝在張力浮動輥上面,從而實現自動計量長度。
計米器程序如下:
?
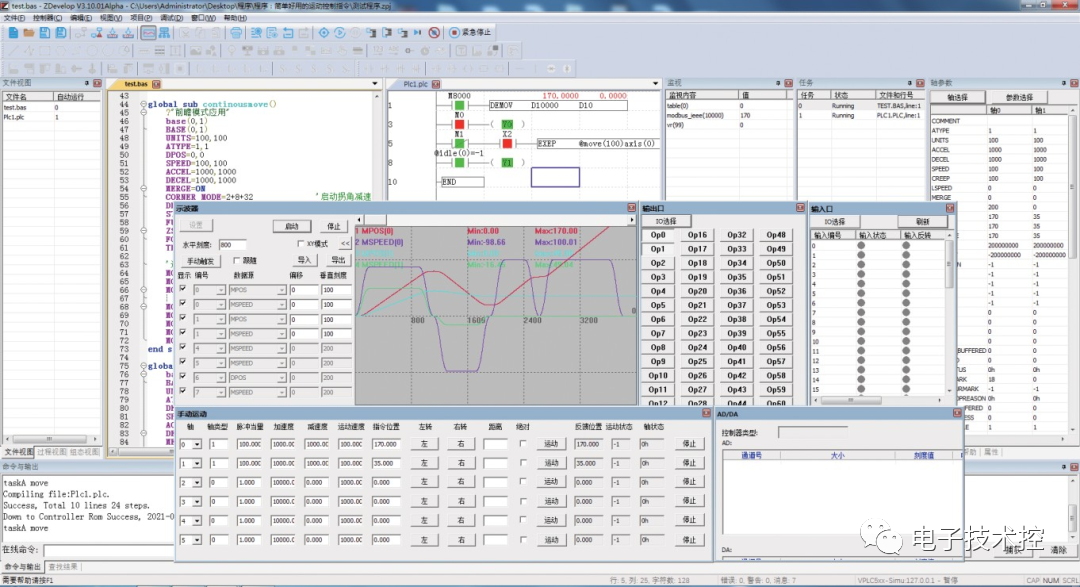
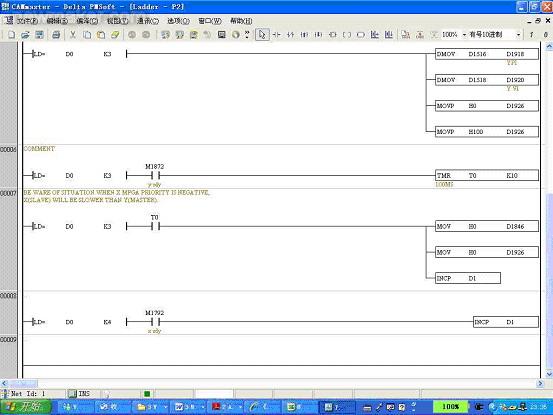
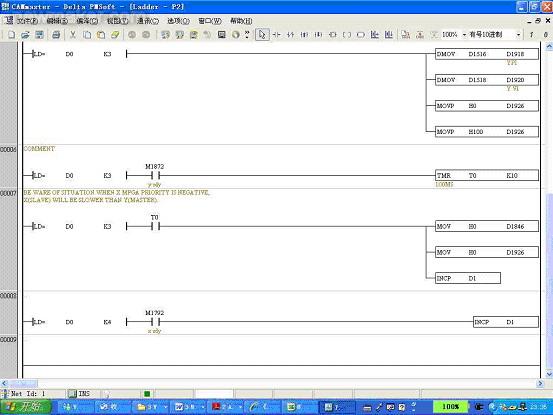
3.3 20PM運動控制初始化
20PM的初始化和部分程序如下:
?
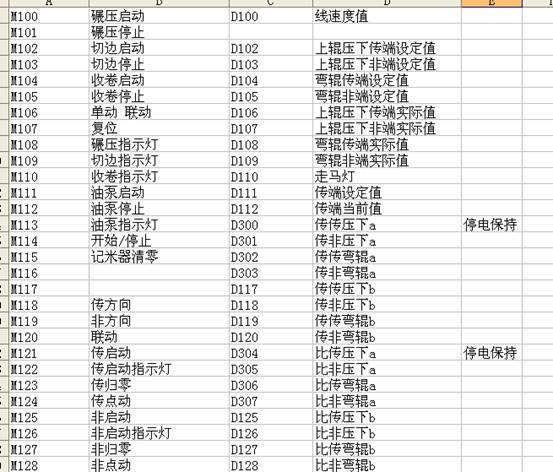
20PM地址定義如下:
?
?
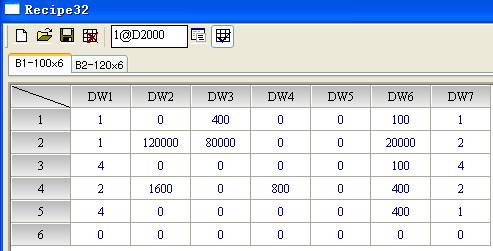
在設備的傳動側,可以實現對2臺伺服的聯動控制和單獨控制,暫時客戶由于經費原因暫時沒有使用手搖輪,在后續機型當中會把手搖輪加上去,這樣單獨控制會更加簡單。伺服的行走距離可以通過觸摸屏上面進行設置,可以通過觸摸屏顯示當前行走距離,可以顯示當速度,可以通過“歸零”按鈕實現對單個伺服的回原點控制。可以通過配方功能把伺服的一些參數提前寫入到觸摸屏里面,隨時根據情況進行調整。
















 工商網監
工商網監
評論