 電子發燒友App
電子發燒友App


0 引言
無人機作為模擬飛機類來襲目標,可為防空武器系統的火控雷達校飛、射擊等任務提供空中靶標,是武器系統研制、鑒定過程中必不可少的裝備。作為無人機的核心組成部分之一,飛控系統通過控制無人機的姿態,從而完成無人機各種模態下的飛行任務。某無人機飛控系統現有的測試方法包括分立部件測試和部件裝機后的整機綜合測試。兩種方法均屬于常規的靜態測試,組織實施復雜、測試效率較低、任務準備周期長,而且對于無人機實際飛行過程的動態性能無法驗證,對測試中出現的故障難以定位,對于飛行中的環境干擾因素(主要是風干擾)和傳感器失效后無人機的飛行情況也無法模擬,從而無法有針對性的進行飛行控制策略修正。綜上問題,研制一套無人機飛控系統半物理仿真平臺的任務顯得尤為迫切。
1 平臺總體功能及設計方案
1.1 平臺總體功能
該平臺以現有某型無人機飛控系統為測試對象,主要完成以下功能:
(1)與無人機飛控計算機和電動舵機、油門電機等實物結合,完成飛控系統的仿真測試;
(2)具備風干擾、力矩干擾條件下的飛行性能模擬,并以二維曲線方式實時顯示無人機的飛行航跡、舵偏角、舵偏角速率等變化情況;
(3)能夠進行無人機飛控系統部分傳感器的故障設置,進行故障情況下的飛行模態仿真。
1.2 平臺總體設計方案
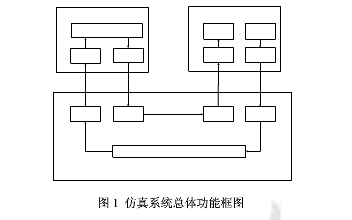
半物理仿真平臺由硬件設備和應用軟件兩部分組成。硬件設備包括新建的飛行系統模擬分系統、傳感器與機載測控模擬分系統、遙控/遙測模擬分系統、指揮顯示分系統、無人機外形顯示分系統,以及現有的飛控計算機、飛控計算機接口箱、電動舵機、油門電機等實物。應用軟件包括新建各分系統的應用程序。半物理仿真平臺的原理組成框圖如圖1所示。
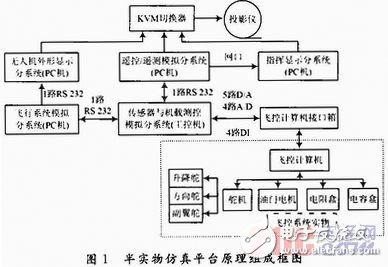
半物理仿真平臺的工作原理概況如下:傳感器與機載測控模擬分系統通過接口箱與飛控計算機交換無人機的舵偏角、角速率、油門開度、遙控指令、外部干擾等信息,并向飛行系統模擬分系統傳輸采樣轉換后的飛控計算機執行結果,向遙控/遙測模擬分系統傳輸遙測信息(包括傳感器與機載測控模擬設備的仿真數據、故障狀態、遙控指令回令等)。飛控計算機將接收到信息進行解算處理后,控制電動舵機、油門電機執行相應動作,并將執行結果返回至傳感器與機載測控模擬分系統。飛行系統模擬分系統將解算后的飛機狀態參數送到無人機外形顯示分系統,解算后以三維動畫的形式顯示無人機的姿態、油門開度、高度變化等信息。指揮顯示分系統將收到的無人機位置、高度、速度信息在數字地圖上顯示,適時發出指揮口令,由操作手干擾無人機的飛行。無人機的三維外形、測控數據、指揮顯示界面通過KVM切換器分時在投影幕上顯示。
2 平臺硬件設計方案
2.1 平臺硬件選型原則
(1)應用軟件運行平臺選擇原則
由于該平臺屬于固定式測試設備,因此在各分系統應用軟件運行平臺的硬件應盡量采用機架式工控機或臺式計算機,主板插槽的數量和類型應相對充裕,以便于現有硬件板卡的安裝和平臺的后續功能拓展。
(2)數據采集卡的選型原則:一是保證通道數;二是保證采樣頻率;三是保證數據分辨率。
2.2 平臺硬件選擇方案
(1)傳感器與機載測控模擬分系統
該分系統包括了大量的信號采集、交換及處理任務,硬件采用工控機架構。配置數據采集卡、多串口卡以及自研的信號調理卡,完成數據采集與信息交換。
具體硬件型號和基本參數為:
工控機選用西門子547B:64位CPU處理器,4個PCI插槽,1個PCI-Ex16圖形擴展接口。
多串口卡選用MOXA CP 118U:4路RS 232/422/485 PCI串口,串口通信速率為921.6 Kb/s;板載1 5 kVESD突波保護。
D/A卡選用NI PCI-6733:8路D/A,數據更新速率1 MS/s(16b),8路數寧I/O。
A/D卡選用NI PCIe-6259:4路D/A,數據更新速率為1 Ms/s(16 b),32路A/D通道數;A/D采樣速率為2.8 MS/s(16 b),48路數字I/O。
DIO卡選用NI PCIe-6503:24路數字I/O。
(2)飛行系統模擬分系統、遙控/遙測模擬分系統
這兩個分系統主要是進行無人機和測控數據的傳輸和解算,其硬件組成比較簡單,選用帶有多種類型主板插槽的普通商用臺式計算機即可,配置MOXA CP118U多串口卡。
(3)指揮顯示分系統、無人機外形顯示分系統
這兩個分系統主要是進行指揮、顯示應用軟件的運行,選用帶有多種類型主板插槽的普通商用臺式計算機即可。
2.3 自制信號調理卡設計
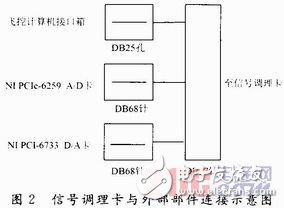
傳感器與機載測控模擬分系統與遙控/遙測模擬分系統、飛行系統模擬分系統、飛控計算機接口箱等部分進行數據交換時,通過D/A,A/D,DIO板卡完成信號轉換時,會受到機箱內復雜電磁環境的影響,導致輸出信號帶有很強的噪聲,需要對其進行濾波處理。另外,由于飛控計算機接口箱輸入輸出電壓均為+27 V,而D/A,A/D,DIO板卡工作電壓均為+5 V,因此還需要設計信號調理卡完成信號濾波和工作電壓的轉換。信號調理卡與外部部件連接示意圖如圖2所示。
3 平臺應用軟件設計方案
平臺應用軟件包括飛行系統模擬分系統、無人機外形顯示分系統、傳感器與機載測控模擬分系統、遙控/遙測模擬分系統、指揮顯示分系統等五個應用軟件。
3.1 飛行系統模擬分系統
主要是通過解算無人機動力學模型,得到無人機的姿態、發動機等信息,實現無人機飛行仿真。仿真過程同時考慮風干擾、力矩干擾的裝訂。
(1)應用軟件開發環境的選擇
由于需要進行無人機動力學模型的解算,考慮到VC++6.0擁有眾多的函數計算類庫,其數據計算能力比較突出,因此選用VC++6.0作為應用軟件開發環境。
(2)無人機動力學模型建立
無人機動力學模型的建立是飛行系統模擬的基礎,根據參考文獻,建立無人機動力學模型。
(3)風干擾和力矩干擾的加載
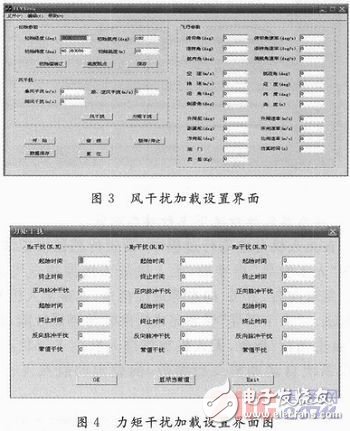
風干擾模擬主要是將風速、風向分解投影到各機體軸上,再結合空氣動力學方程組里的三向速度方程,解算出三向速度,代入動力學模型中解算后得到加入風干擾后的飛機姿態參數。力矩干擾的加載方法采取直接設置動力學模型中相應參數的方式。設置內容包干擾力矩、正向和反向脈沖干擾、起始時間、終止時間以及常值力矩的大小等。
(4)應用軟件的實現
應用軟件完成后,為防止在其他分系統軟件編程過程中產生的誤修改,無人機模型采用動態鏈接庫的方式向提供(UAVSimu.DLL),通過干擾設置界面完成外加力矩的設置,如圖3,圖4所示。
3.2 傳感器與機載測控模擬分系統
可以模擬GPS接收機、磁航向、大氣數據計算機等傳感器特性,通過數字或模擬信號的形式輸出到各相關分系統,供實際平臺仿真使用。可設置的故障類型包括:
GPS接收機失效、航向跳變、大數據計算機高度跳變。
(1)應用軟件開發環境的選擇
由于該應用軟件在設計過程時需要進行大量的軟件界面開發,而Borland公司的C++Builder集成開發環境的最大優點在于其軟件界面開發過程中的直接拖入方式,極大地方便了工程開發。因此選用C++Builder進行應用軟件開發。
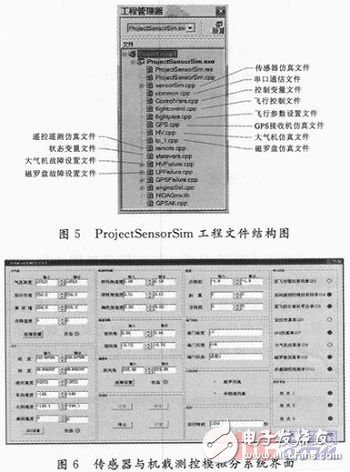
(2)軟件總體設計構建
建立一個“ProjectSensorSim”的工程文件,包括如圖5所示的工程文件,運行該工程文件后,生成分系統軟件界面,如圖6所示。
3.3 遙控/遙測模擬分系統
該分系統用于模擬地面測控站基本功能,用于完成遙控指令的發送、遙測數據的接收。軟件采用模塊化設計,包括二維曲線繪制、航路裝訂、保存與刪除、航跡繪制、串口處理、遙測數據接收、遙測信息處理、遙控指令處理等模塊。
3.4 無人機外形顯示分系統
外形顯示分系統采用VC++2010軟件,基于OpenGL進行開發。軟件模塊包括:通信接口模塊、三維演示模塊、儀表顯示模塊等。
3.5 軟件開發過程中的兩個關鍵問題
(1)降低系統間通信時間延遲技術
由于采用分布式、模塊化結構,各分系統之間通過串口通信,難免會產生通信時延問題,在軟件設計過程中采取了如下措施進行解決:
①減小飛行系統模擬軟件的仿真步長,增加了飛行參數的連續性;
②提高飛行系統模擬、傳感器與機載測控模擬與飛控計算機模擬三個分系統之間的姿態信息傳輸的串口波特率;
③優化傳感器與機載測控模擬分系統與其他分系統之間串口數據通信的幀結構;確保姿態信息以最短的時間到達飛控計算機。
(2)工控設備數據實時性處理技術
由于傳感器與機載測控模擬分系統采用工控機架構,需要同時與飛行系統模擬等多個分系統等進行數據通信,所有的任務均要求在毫秒級完成。在軟件設計中,采用在Windows環境下應用Multimedia Timer(多媒體定時器)結合多線程來實現。應用多媒體定時器是計算機從硬件上支持的精確定時器,其定時誤差一般可達到十微秒級,完全可以滿足實時性要求。
4 平臺功能測試驗證
4. 1 飛控系統仿真測試功能驗證
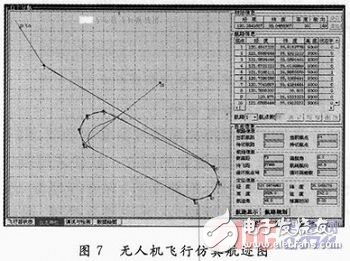
按圖1連接平臺各個組成部分,運行各應用軟件,進行全系統基本功能測試。測試結果如圖7所示。無人機能夠按照預先裝訂的航路完成飛行仿真;遙控/遙測模擬軟件能實時顯示無人機的姿態信息、傳感器模擬信息等,以二維曲線和狀態指示燈的方式直觀顯示;以三維動畫的方式逼真顯示無人機飛行過程中的姿態、高度變化情況。
4.2 干擾條件下飛行性能模擬功能測試
(1)風干擾模式下的仿真
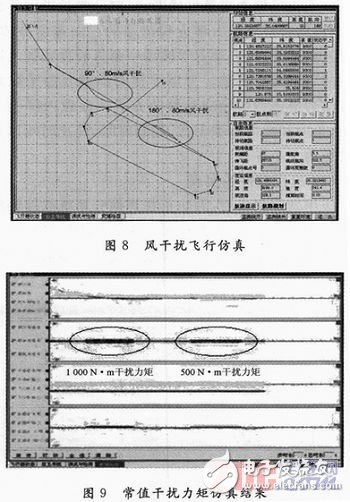
在飛行系統模擬分系統中,通過“風干擾”功能按鈕,分別設置風干擾為正北向90°,80 m/s和正北向180°,80 m/s,觀察無人機飛行仿真航跡變化情況,如圖8所示。可以看到,無人機受到風干擾后,航跡短時發生了明顯變化,之后飛控系統能夠及時糾正航路偏差,使無人機按照預定航路飛行。
(2)干擾力矩作用下的仿真
在飛行系統模擬分系統中,分別設置外部干擾為1000 N·m和500 N·m的常值干擾力矩,觀察無人機在此干擾情況下的仿真情況,如圖9所示。由圖可以看出,不同力矩作用下的無人機各舵偏角和舵偏角速率大小。在施加干擾力/力矩情況下,無人機姿態發生了明顯變化,隨之飛控系統通過不斷調整舵偏角和舵偏角速率來消除外加干擾的影響,保證無人機能夠按照預定的姿態正常飛行。
4.3 傳感器故障情況下飛行模態測試
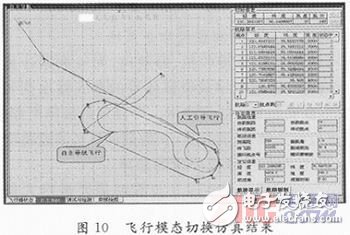
在無人機自主飛行過程中,設置傳感器模擬故障,發送“人工引導”指令后,無人機進入遙控指令飛行模態。發送向右、直飛、向左等遙控指令,觀察無人機的飛行航跡。“人工引導”模態完成后解除傳感器故障,再發送“自主飛行”指令,無人機重新進入自主飛行狀態,由飛控系統自動調整飛行參數,向設定的航點飛行,如圖10所示。
5 結語
本文介紹了無人機飛控系統半物理仿真平臺的基本功能、總體技術方案、硬件選型方案和軟件設計方案。最后,對平臺的基本功能進行了測試驗證。該平臺不僅可以用于飛控系統的仿真測試,還可以進行無人機飛行規律研究、飛行性能評估、操控人員模擬訓練等。










 工商網監
工商網監
評論