根據(jù)研究目的及人體結(jié)構(gòu)和功能的特殊性和復(fù)雜性,通過將人體下肢作適當(dāng)簡化及必要的假設(shè),提出基于骨-肌肉功能模型的下肢助力機(jī)器人控制方法,該方法通過對骨-肌肉模型中的彈性系數(shù)和阻尼系數(shù)的調(diào)節(jié)能為人體下肢
2014-02-18 17:50:02 11676
11676 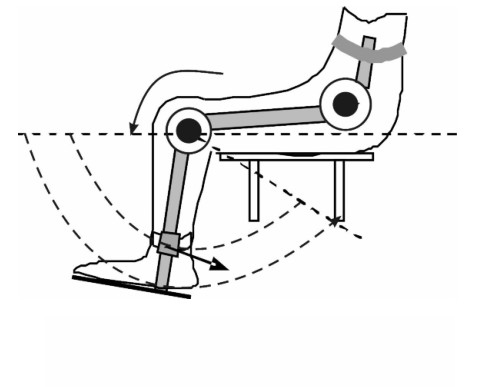
可穿戴設(shè)備是一種可以安裝在人、動物和物品上,并能感知、傳遞和處理信息的計(jì)算設(shè)備,傳感器是可穿戴設(shè)備的核心器件,可穿戴設(shè)備中的傳感器是人類感官的延伸,增強(qiáng)了人類“第六感”功能,是人/物與世界溝通的“芯
2014-12-13 15:38:38
`機(jī)器人`
2015-08-09 12:23:02
有沒有機(jī)器人比較全的資料
2017-03-21 12:35:21
請各位大神指導(dǎo),移動式機(jī)器人是怎么做EMC保護(hù)的,機(jī)器人是鋰電池供電,所以就不能接大地了,那么對機(jī)器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
第二章 機(jī)器人系統(tǒng)與控制需求簡介2.1 工業(yè)機(jī)器人的系統(tǒng)組成機(jī)械本體:精密減速機(jī)、伺服電機(jī)、伺服驅(qū)動器、控制系統(tǒng)(核心零部件)控制柜示教盒2.2 機(jī)器人本體結(jié)構(gòu)與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
機(jī)器人的移動通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請求時開始的。導(dǎo)航系統(tǒng)通過制定行程計(jì)劃或軌跡以開始執(zhí)行位置變化請求。行程計(jì)劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及任何相關(guān)的任務(wù)目標(biāo)。
2019-09-10 10:44:32
機(jī)器人的運(yùn)動原理還是屬于最基本的簡單機(jī)械。機(jī)器人運(yùn)動主要是依靠什么裝置?有些什么裝置是機(jī)器人用的比較多的?
2015-02-03 11:22:01
如題。機(jī)器人的這個備份系統(tǒng)問題。想求大神講解一下哈。
2015-01-16 10:38:44
現(xiàn)在想做機(jī)器人圖像識別方面的研究,有問題請教大家,比如說:現(xiàn)在有十種瓶子,機(jī)器人能識別我指定的瓶子,并把它從A位置移動到B位置,關(guān)鍵是如何識別呢,不是很清楚,求大神指點(diǎn)!在此感激不盡!
2019-11-04 09:02:57
想弄一個vi可以動態(tài)顯示機(jī)器人的姿態(tài),但不知道有什么函數(shù)可以引入機(jī)器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
的結(jié)構(gòu),用于感知,持有和拖動)它應(yīng)該有傳感器。沒有傳感器,機(jī)器人是不可能理解它周圍的環(huán)境的。這個列表顯示了被稱為 ROBOT 的機(jī)器的基本需求。實(shí)際上提到的東西是什么?我們將逐一了解它們。圖1: 單片機(jī)
2022-03-31 10:31:31
機(jī)器人的定義是什么?機(jī)器人優(yōu)點(diǎn)和缺點(diǎn)是什么?機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人的應(yīng)用有哪些?
2021-07-05 06:48:21
筆記本電腦(Notebook)當(dāng)作主控,撰寫人機(jī)接口主控程序,以射頻(RF)無線模塊進(jìn)行溝通,主控計(jì)算機(jī)可下達(dá)指令給機(jī)器人并接收機(jī)器人的狀態(tài)回傳數(shù)據(jù)。本文設(shè)計(jì)的主題是將此機(jī)器人群控系統(tǒng)應(yīng)用于兩種機(jī)器人隊(duì)形變換,分別是橫縱隊(duì)形變換跟四角位置隊(duì)形變換。
2019-06-27 07:02:14
視覺系統(tǒng)成為研究的新課題。1965年, Stanford建立機(jī)器人實(shí)驗(yàn)室開始研究機(jī)器人。機(jī)器人的定義:【機(jī)器人】是一種可以用來移動材料,零件,工具或特定裝置的可以重新編程的多功能操...
2021-09-07 08:37:58
目前產(chǎn)業(yè)機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動作,缺乏對環(huán)境的感知與應(yīng)變能力,這極大地限制了機(jī)器人的應(yīng)用。利用機(jī)器人的視覺控制,不需要預(yù)先對產(chǎn)業(yè)機(jī)器人的運(yùn)動軌跡進(jìn)行示教或離線編程,可節(jié)約
2015-01-23 15:02:27
`機(jī)器人足球識別算法研究`
2012-08-20 19:59:14
解讀ATmega32機(jī)器人系統(tǒng)電子電路
2019-09-19 08:33:59
傳感器技術(shù)是仿人機(jī)器人研究的關(guān)鍵技術(shù)之一。仿人機(jī)器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因?yàn)樗軌蛲ㄟ^傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實(shí)現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機(jī)器人
2019-09-18 06:17:46
家庭服務(wù)機(jī)器人是機(jī)器人的發(fā)展方向,是我國進(jìn)一步加強(qiáng)機(jī)器人技術(shù)研究的突破口。家庭服務(wù)機(jī)器人旨在將家庭成員從家居的繁瑣家務(wù)中解放出來,給家庭成員提供幫助、娛樂等。
2019-08-20 06:57:41
針對傳統(tǒng)的物流分揀過程效率低、成本高的現(xiàn)狀以及利用機(jī)器視覺進(jìn)行分揀快速、可靠的優(yōu)點(diǎn)對機(jī)器視覺、圖像處理和Tiropd機(jī)器人進(jìn)行了研究基于LabVIEW設(shè)計(jì)了Tripod機(jī)器人視覺系統(tǒng)將分揀過程簡化
2019-06-01 06:00:00
。
系統(tǒng)研究與算法開發(fā):首先,項(xiàng)目圍繞機(jī)器人的數(shù)學(xué)模型,特別是空間位姿描述和D-H模型展開研究。在此基礎(chǔ)上,開發(fā)了機(jī)器人的運(yùn)動學(xué)正反解算法,使用了雅克比-迭代法等先進(jìn)技術(shù)。此外,還涉及了機(jī)器人任務(wù)空間和關(guān)節(jié)
2023-12-21 20:03:18
自動或半自動機(jī)器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執(zhí)行器上。NI提供了多種嵌入式硬件平臺,以滿足復(fù)雜系統(tǒng)的需求。從尖端的機(jī)器人研究項(xiàng)目直至高級行業(yè)應(yīng)用,NI平臺被證實(shí)是高效的機(jī)器人解決方案。
2019-11-06 07:50:49
ZN-MPS03型柔性自動化生產(chǎn)線及工業(yè)機(jī)器人應(yīng)用實(shí)訓(xùn)系統(tǒng)是什么?ZN-MPS03型柔性自動化生產(chǎn)線及工業(yè)機(jī)器人應(yīng)用實(shí)訓(xùn)系統(tǒng)有哪些技術(shù)參數(shù)?
2021-09-27 07:12:32
什么是ZNRX-J2型工業(yè)機(jī)器人柔性自動化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)?ZNRX-J2型工業(yè)機(jī)器人柔性自動化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)有哪些技術(shù)參數(shù)?ZNRX-J2型工業(yè)機(jī)器人柔性自動化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)有哪些功能?
2021-08-10 07:56:56
(Larry Page)親自主持了這筆收購,收購金額則在4-5億美元之間。5. 機(jī)器人公司HolomniHolomni是一家專注于研究機(jī)械加速系統(tǒng)和汽車加速系統(tǒng)的公司。同此前的所有收購案一樣
2014-12-30 16:31:19
申請理由:現(xiàn)正在進(jìn)行一個關(guān)于智能清掃機(jī)器人的項(xiàng)目研究,希望基于ARM搭建一款可以實(shí)現(xiàn)自動清掃和自動返回充電的,具有自主管理能力的清掃機(jī)器人,同時對相應(yīng)功能進(jìn)行改造完善。需要用到ARM芯片若干項(xiàng)目描述
2015-07-06 10:59:02
項(xiàng)目名稱:基于stm32的人型機(jī)器人研究試用計(jì)劃:從32底層學(xué)起,自己編寫代碼,讓硬件跑起來。
2016-12-07 16:53:36
申請理由:本人是一研究生,研究的是機(jī)器人方向,里面需要的很多參數(shù)和MiCOKit 開發(fā)板有關(guān),很希望能申請到,謝謝.項(xiàng)目描述:這是一款基于F2812DSP的一款和熱感應(yīng)有關(guān)的機(jī)器人系統(tǒng),內(nèi)部含有藍(lán)牙,紅外感應(yīng)、Wi-Fi等模塊,是一款多操作的機(jī)器設(shè)備。
2015-07-24 07:18:22
一種小型移動機(jī)器人的控制系統(tǒng)研究
2012-08-20 15:53:10
機(jī)器人驅(qū)動裝置是什么?機(jī)器人驅(qū)動裝置系統(tǒng)是由哪些部分組成的?
2021-07-05 07:05:10
。這項(xiàng)研究成果發(fā)表在本月的智能機(jī)器人與系統(tǒng)國際會議上。 在這個研究中,林肯大學(xué)計(jì)算機(jī)科學(xué)系的博士John Murray和Mriganka Biswas為3個機(jī)器人編入了會犯錯的程序,并對與之互動的人類被
2015-12-28 14:42:31
服務(wù)型機(jī)器人市場的主要“玩家”包括醫(yī)療器械公司 Intuitive Surgical、iRobot、谷歌(微博)、德國的庫卡(美的控股)和中國的大疆。此外,有數(shù)百家新創(chuàng)公司也準(zhǔn)備來分一杯羹。專家認(rèn)為,專業(yè)級服務(wù)型機(jī)器人和面向個人和家庭的服務(wù)型機(jī)器人到 2019 年將各自占據(jù)市場的半壁江山。
2020-11-30 06:32:56
隨著物聯(lián)網(wǎng)、人工智能、云計(jì)算、大數(shù)據(jù)等高新技術(shù)的不斷發(fā)展,警用安保巡邏機(jī)器人的研究如火如荼,應(yīng)用逐步廣泛,在協(xié)助民警執(zhí)勤、智能安防、便民服務(wù)等方面作用突出。本文在總結(jié)警用安保巡邏機(jī)器人研究現(xiàn)狀
2018-12-24 09:19:24
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
的飛速發(fā)展,到了2016年的今天,筆者堅(jiān)信各項(xiàng)技術(shù)已臻成熟,智能機(jī)器人很快進(jìn)入商業(yè)化時代,蓋茨的愿景也極有可能在5到10年內(nèi)實(shí)現(xiàn)。要想機(jī)器人有智能,必先賦予其感知能力。感知計(jì)算,特別是視覺以及深度學(xué)習(xí),通常計(jì)算量比較大,對性能要求高。
2019-10-08 07:48:03
要想機(jī)器人有智能,必先賦予其感知能力。感知計(jì)算,特別是視覺以及深度學(xué)習(xí),通常計(jì)算量比較大,對性能要求高。但是機(jī)器人受電池容量限制,可分配給計(jì)算的能源比較低。
2019-10-10 06:39:48
系統(tǒng)。當(dāng)今工業(yè)機(jī)器人技術(shù)正逐漸向著具有行走能力、具有多種感知能力、具有較強(qiáng)的對作業(yè)環(huán)境的自適應(yīng)能力的方向發(fā)展。目前,對全球機(jī)器人技術(shù)的發(fā)展最有影響的國家是美國和日本。美國在工業(yè)機(jī)器人技術(shù)的綜合研究水平
2015-01-19 10:58:38
《先進(jìn)機(jī)器人控制》從控制的角度系統(tǒng)地介紹了機(jī)器人學(xué)的基礎(chǔ)知識和當(dāng)前的發(fā)展?fàn)顩r。全書共分為12章,由基礎(chǔ)篇、控制結(jié)構(gòu)篇和先進(jìn)控制篇構(gòu)成。基礎(chǔ)篇著重介紹串聯(lián)關(guān)節(jié)機(jī)器人的運(yùn)動學(xué)、運(yùn)動規(guī)劃和動力學(xué)。其中
2017-09-19 15:30:57
,2002-2022年歐洲機(jī)器人研究路線圖的提出為未來工業(yè)機(jī)器人研究提出了方針指導(dǎo)。 韓國 韓國在工業(yè)機(jī)器人產(chǎn)業(yè)方面也投入了大量的精力。2009年,韓國***提出了第一個智能型機(jī)器人基礎(chǔ)計(jì)劃,計(jì)劃在2013年前投入1
2016-01-28 15:21:21
可穿戴型下肢助力機(jī)器人是輔助型康復(fù)機(jī)器人的一種,是一種幫助人們擴(kuò)展下肢運(yùn)動能力的助力裝置,其基本原理是在基于人體運(yùn)動行為意識信息的基礎(chǔ)上,由安裝在腿部關(guān)節(jié)(髖關(guān)節(jié)及膝關(guān)節(jié))處的伺服電機(jī)驅(qū)動關(guān)節(jié)運(yùn)動
2020-04-27 08:04:05
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-07-05 07:08:47
工業(yè)機(jī)器人的四大特征是哪些?工業(yè)機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人是怎樣進(jìn)行劃分的?
2021-10-11 09:10:17
本帖最后由 也瘦至尊寶 于 2013-5-6 16:03 編輯
分享 《機(jī)器人制作天空寶典》,OHM 自律型機(jī)器人制作
2013-05-06 16:03:04
領(lǐng)域中。 二、專業(yè)建設(shè)及人才需求前景機(jī)器人制造廠商:需求機(jī)器人組裝、銷售、售后支持的技術(shù)和營銷人才。機(jī)器人系統(tǒng)集成商:需求機(jī)器人工作站的開發(fā)、安裝調(diào)試、技術(shù)支持等專業(yè)人才;機(jī)器人的應(yīng)用企業(yè):需求機(jī)器人
2015-09-02 14:03:18
是將安全性和安全性問題進(jìn)行合并,就像設(shè)計(jì)同時考慮這兩個方面的工業(yè)設(shè)施,下圖是協(xié)作型機(jī)器人的幾種應(yīng)用類型。 協(xié)作機(jī)器人網(wǎng)絡(luò)物理系統(tǒng)是一種智能系統(tǒng),其中集成了計(jì)算和物理系統(tǒng),以控制和感知現(xiàn)實(shí)世界變量的變化
2020-12-01 14:24:33
四足機(jī)器人屬于復(fù)雜機(jī)電系統(tǒng),需要綜合生物、機(jī)械、電子、控制等學(xué)科內(nèi)容,具體涉及仿生機(jī)構(gòu)設(shè)計(jì)、靈巧運(yùn)動機(jī)構(gòu)設(shè)計(jì)、高性能驅(qū)動器制造,行走穩(wěn)定性控制、強(qiáng)化學(xué)習(xí)等在內(nèi)的多個研究方向。其中,機(jī)構(gòu)設(shè)計(jì)是保障四足
2021-09-15 06:54:01
感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實(shí)現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機(jī)器人中應(yīng)用的傳感器種類繁多,例如視覺傳感器、電子羅盤、加速度計(jì)和超聲波傳感器等都是仿人機(jī)器人中常用的傳感器。DF-1機(jī)器人
2019-06-21 07:04:37
研究的前沿,它在一定程度上代表了一個國家的高科技發(fā)展水平。運(yùn)動控制系統(tǒng)是機(jī)器人控制技術(shù)的核心,也是機(jī)器人研究領(lǐng)域的關(guān)鍵技術(shù)之一,在機(jī)器人控制中具有舉足輕重的地位,因此,各研究機(jī)構(gòu)都把對機(jī)器人運(yùn)動控制系統(tǒng)的研究作為首要任務(wù)。
2020-08-19 06:57:09
研究了一種用FPGA技術(shù)實(shí)現(xiàn)三輪全方位移動機(jī)器人運(yùn)動控制系統(tǒng)的方法,與雙DSP結(jié)構(gòu),DSP+CPLD結(jié)構(gòu),以及DSP+專用集成電路結(jié)構(gòu)等相比,該方法具有簡單可靠,擴(kuò)展性強(qiáng)等特點(diǎn)。且FPGA設(shè)計(jì)簡單,使用方便,開發(fā)周期短,能夠?qū)崿F(xiàn)真正的SOPC系統(tǒng)。
2019-10-22 07:35:19
制造出像人一樣具有智能的能替代人類勞動的機(jī)器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機(jī)器人的研究中,具有視覺的機(jī)器人的研究也就成了第一位的。對機(jī)器人視覺伺服系統(tǒng)的研究是機(jī)器人領(lǐng)域中的重要內(nèi)容之一,其研究成果可應(yīng)用在機(jī)器人自動避障、軌跡跟蹤和運(yùn)動目標(biāo)跟蹤等問題中。
2019-09-27 08:07:35
”特征的算法,同時根據(jù)學(xué)習(xí)到的“經(jīng)驗(yàn)數(shù)據(jù)”,從而能把圖片中的貓都識別出來。基于“深度學(xué)習(xí)”的智能分類 智能機(jī)器人就是通過搭載“深度學(xué)習(xí)”系統(tǒng),實(shí)現(xiàn)對環(huán)境參數(shù)的感知,從而智能判斷自己應(yīng)該執(zhí)行什么程序,包括
2018-05-31 09:36:03
的環(huán)境狀態(tài)中有意義的信息,智能傳感器的使用提高了機(jī)器人的機(jī)動性,實(shí)用性和智能化的水準(zhǔn),人類的感受系統(tǒng)對感知外部世界信息是機(jī)器靈巧的,然而,對于一些特許的信息,傳感器比人的系統(tǒng)更加有效。(4)機(jī)器人-環(huán)境
2016-03-06 12:56:19
樹莓派和其他機(jī)器人的控制器有何不同?如何使用樹莓派開發(fā)智能機(jī)器人控制系統(tǒng)?
2021-12-23 06:55:02
其設(shè)計(jì)是機(jī)器人研究的核心。該控制系統(tǒng)通常以MCU、 DSP等為核心,采用上、下位機(jī)二級分布式結(jié)構(gòu)。其中上位機(jī)一般為PC機(jī),下位機(jī)為單片機(jī)或DSP等微控制器。但隨著移動機(jī)器人的智能化,控制方法的發(fā)展,所需
2019-07-30 07:02:31
性能與可靠的機(jī)械控制性能的同時保證,才能在短時間內(nèi)準(zhǔn)確尋找到火源并滅火回家。在此以ARM9處理器為核心,對基于嵌入式系統(tǒng)的智能滅火機(jī)器人進(jìn)行了設(shè)計(jì)。本文將從硬件和軟件方面講述智能滅火機(jī)器人控制器的實(shí)現(xiàn)方法,并且給出了機(jī)器人滅火的具體實(shí)驗(yàn),驗(yàn)證了方案的可行性,為智能滅火機(jī)器人的進(jìn)一步研究提供了平臺。
2019-07-31 06:23:18
移動機(jī)器人是機(jī)器人的重要研究領(lǐng)域,人們很早就開始移動機(jī)器人的研究。世界上第一臺真正意義上的移動機(jī)器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它裝備了
2020-05-14 08:15:00
移動機(jī)器人是一種能夠感知外部環(huán)境,在有障礙物的環(huán)境中能夠?qū)崿F(xiàn)動態(tài)決策與規(guī)劃,從而完成避障等多種功能的綜合系統(tǒng)。機(jī)器人系統(tǒng)通常分為機(jī)構(gòu)本體和控制系統(tǒng)兩部分,控制系統(tǒng)的作用是根據(jù)用戶的指令對機(jī)構(gòu)本體進(jìn)行
2020-03-06 07:07:07
隨著人口老齡化進(jìn)程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務(wù)機(jī)器人控制系統(tǒng)設(shè)計(jì)。該服務(wù)機(jī)器人的控制系統(tǒng)是機(jī)器人的神經(jīng)中樞,因而其設(shè)計(jì)是機(jī)器人研究的核心。該控制系統(tǒng)通常以MCU、 DSP等為核心,采用上、下位機(jī)二級分布式結(jié)構(gòu)。
2019-10-15 08:03:16
機(jī)器人本體制造商負(fù)責(zé)工業(yè)機(jī)器人執(zhí)行機(jī)構(gòu)和感知系統(tǒng)與核心部件的生產(chǎn)加工組裝后,交由下游廠商生產(chǎn)。本體企業(yè)在整個產(chǎn)業(yè)鏈中起到了整合上下游的作用。本體生產(chǎn)包括手臂、腕部、臂部、腰部、基座等部件生產(chǎn)組裝,還包括
2017-08-23 15:10:27
機(jī)器人技術(shù)是綜合了計(jì)算機(jī)、控制論、機(jī)構(gòu)學(xué)、信息和傳感技術(shù)、人工智能、仿生學(xué)等多學(xué)科而形成的高新技術(shù),是當(dāng)代研究十分活躍,應(yīng)用日益廣泛的領(lǐng)域。機(jī)器人應(yīng)用情況,是一個國家工業(yè)自動化水平的重要標(biāo)志。
2020-03-27 09:03:30
工業(yè)機(jī)器人一般由主構(gòu)架(手臂)、手腕、驅(qū)動系統(tǒng)、測量系統(tǒng)、控制器及傳感器等組成。 1圖是工業(yè)機(jī)器人的典型結(jié)構(gòu)。機(jī)器人手臂具有3個自由度(運(yùn)動坐標(biāo)軸),機(jī)器人作業(yè)空間由手臂運(yùn)動范圍決定。手腕是機(jī)器人
2015-01-19 10:36:12
機(jī)器人聽覺系統(tǒng)主要是對人的聲音進(jìn)行語音識別并做出判斷,然后輸出相應(yīng)的動作指令控制頭部和手臂的動作,傳統(tǒng)的機(jī)器人聽覺系統(tǒng)一般是以PC機(jī)為平臺對機(jī)器人進(jìn)行控制,其特點(diǎn)是用一臺計(jì)算機(jī)作為機(jī)器人的信息處理
2019-08-21 07:51:24
機(jī)器人聽覺系統(tǒng)主要是對人的聲音進(jìn)行語音識別并做出判斷,然后輸出相應(yīng)的動作指令控制頭部和手臂的動作,傳統(tǒng)的機(jī)器人聽覺系統(tǒng)一般是以PC機(jī)為平臺對機(jī)器人進(jìn)行控制,其特點(diǎn)是用一臺計(jì)算機(jī)作為機(jī)器人的信息處理
2019-08-30 08:23:42
關(guān)于ros智能機(jī)器人,就是一個寫智能機(jī)器人代碼的一個虛擬機(jī),
2021-10-13 19:20:16
不久開始被年輕人棄待了。曾有研究發(fā)現(xiàn),對于可穿戴設(shè)備,大多數(shù)的人都愿意去購買和嘗試,但是卻很少人對其產(chǎn)生依懶性,超過一半的人在購買之后的17個月后會放棄使用。因此,可以說,可穿戴市場來的快,淡的也快
2018-11-19 09:49:45
自動蔽障,自動清掃的功能。清潔機(jī)器人是實(shí)現(xiàn)智能清掃的主題部分,我們將要做到的是:完成機(jī)械結(jié)構(gòu)的設(shè)計(jì)與制作、硬件電路的設(shè)計(jì)及實(shí)現(xiàn)、底層軟件的編寫以及系統(tǒng)調(diào)試、智能手機(jī)藍(lán)牙通訊技術(shù)的研究及實(shí)現(xiàn)、清潔機(jī)器人
2013-11-08 22:30:10
市場寵兒,深圳市可穿戴產(chǎn)業(yè)年產(chǎn)值已超10億元,涉及企業(yè)近500家。其中寶安區(qū)就有200多家企業(yè)從事可穿戴設(shè)備生產(chǎn)和制造,產(chǎn)值占到了深圳60%以上。此外深圳市從事機(jī)器人研發(fā)和生產(chǎn)的企業(yè)近300家,包括
2017-06-09 17:32:37
20世紀(jì)以來隨著電子技術(shù)的不斷發(fā)展,以及人類對于自身的不斷了解,機(jī)器人的研究也在不斷的深入。現(xiàn)階段能做出外表接近人類的機(jī)器人,走路接近人類的機(jī)器人……但這些都屬于很前沿的領(lǐng)域,研究門檻高,實(shí)際的商業(yè)用途不是很廣,所以大多還停留在樣品階段,走進(jìn)市場的很少。
2019-10-16 08:27:30
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-06-30 06:37:34
服務(wù)型智能掃地機(jī)器人因其低廉的價格和高效的工作能力,越來越受到消費(fèi)者的認(rèn)可,目前己逐漸進(jìn)入家庭生活代替人們的清潔工作,具有廣闊的市場。服務(wù)型智能掃地機(jī)器人需要具有自主運(yùn)動規(guī)劃和導(dǎo)航功能,在其工作
2021-11-08 09:26:58
跟蹤等領(lǐng)域。不同種類的機(jī)器人由于工作的重點(diǎn)不一樣,它的視覺系統(tǒng)在軟件或硬件上都有著細(xì)微的差別。本文研究基于服務(wù)機(jī)器人的單目視覺系統(tǒng)。它處理的是二維圖像,是基于對無遮擋物體顏色和形狀的識別以及3D目標(biāo)物體的平動跟蹤。
2020-04-07 07:27:24
未來家庭的監(jiān)控機(jī)器人應(yīng)該要具備以下特征:1.擬人化設(shè)計(jì),具有可愛的操作接口讓人很容易從遠(yuǎn) 端監(jiān)控.2.監(jiān)控機(jī)器人可以儲存所看到的影像,并通過遠(yuǎn)程傳給家庭主人.3.監(jiān)控機(jī)器人本身要有基本的感知
2019-10-30 02:25:39
當(dāng)前人工智能快速發(fā)展,各種類人功能智能機(jī)器人層出不窮,觸覺感知是人類和未來智能機(jī)器探索物理世界的基礎(chǔ)性功能之一,發(fā)展具有觸覺功能的仿生電子皮膚柔性感知器件,并實(shí)現(xiàn)器件與柔軟組織間的機(jī)械匹配性具有重要
2018-09-21 11:53:21
機(jī)器人前沿--下肢外骨骼機(jī)器人
2019-04-28 06:56:09
博洛尼亞、新加坡設(shè)有教學(xué)校區(qū)。 該校的計(jì)算機(jī)感知和機(jī)器人實(shí)驗(yàn)室的研究方向是:在機(jī)器人科學(xué)和工程領(lǐng)域,創(chuàng)造知識,促進(jìn)創(chuàng)新。這是通過讓學(xué)生接觸到各種各樣的機(jī)器人來實(shí)現(xiàn)的。其肢體實(shí)驗(yàn)室,探究了動物感官
2015-01-13 17:15:31
1.2.6 智能機(jī)器人1.3 自律型移動機(jī)器人1.3.1 感知1.3.2 動作與結(jié)構(gòu)1.3.3 智能1.4 小結(jié)第2章 機(jī)器人的運(yùn)動2.1 機(jī)器人運(yùn)動的環(huán)境2.1.1 機(jī)器人所處的環(huán)境2.1.2 開環(huán)控制
2016-06-23 11:18:52
***有關(guān)部門應(yīng)組織力量進(jìn)行充分地調(diào)查研究,在此基礎(chǔ)上,制定切實(shí)可行的推廣、應(yīng)用機(jī)器人和促進(jìn)機(jī)器人研究開發(fā)的傾斜政策。如在稅收、投資和貸款方面對機(jī)器人產(chǎn)業(yè)實(shí)行扶持政策。日本***通過制定政策,采取一系列
2016-09-08 10:34:05
菜鳥想要學(xué)習(xí)ROS機(jī)器人操作系統(tǒng),但是沒能找到系統(tǒng)的資料,請問有哪位大神研究過,可以分享一些資料嗎?跪謝了!!!!!!!!!
2019-02-19 23:14:23
我是新人,求幫助啊,明天需要提交輪式機(jī)器人應(yīng)用的報告,求大神給點(diǎn)建議,可用輪式機(jī)器人應(yīng)用于那些方面,要求實(shí)際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
0引言傳感器技術(shù)是仿人機(jī)器人研究的關(guān)鍵技術(shù)之一。仿人機(jī)器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因?yàn)樗軌蛲ㄟ^傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實(shí)現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿
2019-07-29 06:09:58
江智黨建機(jī)器人是經(jīng)過多年的市場沉淀 ;現(xiàn)已可以提供系統(tǒng) 全方位的黨建機(jī)器人服務(wù)
2022-06-21 07:59:59
邁步機(jī)器人BEAR-H系列是用于輔助腦卒中患者步態(tài)康復(fù)訓(xùn)練的新型可穿戴式下肢外骨骼機(jī)器人。機(jī)器人擁有主動被動訓(xùn)練模式,通過對患者髖、膝、踝關(guān)節(jié)提供助力完成行走訓(xùn)練,可以節(jié)省人力,并提高康復(fù)效果
2023-09-20 17:25:48
下肢外骨骼康復(fù)機(jī)器人BEAR-A1利用仿生學(xué)、人體工學(xué)、機(jī)器人技術(shù),為下肢運(yùn)動功能障礙者提供康復(fù)訓(xùn)練。通過對患者髖、膝關(guān)節(jié)提供助力完成康復(fù)訓(xùn)練,可以有效降低治療師工作強(qiáng)度,提高康復(fù)訓(xùn)練效率,提高患者
2023-09-20 17:31:33
基于現(xiàn)場總線的分布式智能機(jī)器人感知系統(tǒng)研究!資料來源網(wǎng)絡(luò),如有侵權(quán),敬請見晾
2015-11-30 11:31:32 8
8 機(jī)器人多傳感器測距系統(tǒng)研究與設(shè)計(jì)......
2015-12-23 14:46:4910 可穿戴型下肢助力機(jī)器人是輔助型康復(fù)機(jī)器人的一種,是一種幫助人們擴(kuò)展下肢運(yùn)動能力的助力裝置,其基本原理是在基于人體運(yùn)動行為意識信息的基礎(chǔ)上,由安裝在腿部關(guān)節(jié)(髖關(guān)節(jié)及膝關(guān)節(jié))處的伺服電機(jī)驅(qū)動關(guān)節(jié)運(yùn)動
2018-10-07 09:07:008551 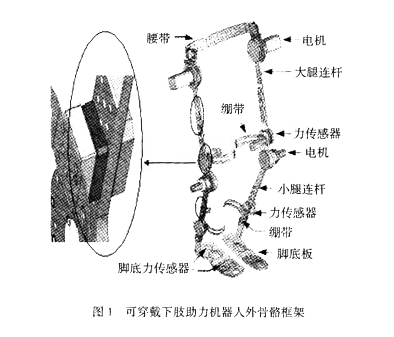
據(jù)報道,LG電子正致力于擴(kuò)大在機(jī)器人領(lǐng)域的布局,計(jì)劃在8月31日首次公開可以支持人體下肢肌肉力量的“LG CLOi SuitBot”可穿戴機(jī)器人。
2018-09-12 09:52:48961 邁步下肢外骨骼康復(fù)訓(xùn)練機(jī)器人BEAR-H1是一款輔助腦卒中患者用于步態(tài)康復(fù)訓(xùn)練的新型可穿戴式下肢外骨骼機(jī)器人。憑借出色的設(shè)計(jì)和創(chuàng)新的概念,該產(chǎn)品榮獲2018年德國紅點(diǎn)概念設(shè)計(jì)大獎。
2023-08-30 14:17:44414 電子發(fā)燒友網(wǎng)站提供《基于嵌入式技術(shù)的智能機(jī)器人系統(tǒng)研究.pdf》資料免費(fèi)下載
2023-10-26 10:49:130
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論