 電子發燒友App
電子發燒友App


隨著Internet的普及,實現智能家居遠程控制不再是人們的夢想,所謂遠程控制,是指管理人員在異地通過計算機網絡異地撥號或雙方都接入Internet等手段,聯通需被控制的計算機,將被控計算機的桌面環境顯示到自己的計算機上,通過本地計算機對遠方計算機進行配置、軟件安裝程序、修改等工作。遠程喚醒(WOL),即通過局域網絡實現遠程開機。CAN是控制器局域網絡(Controller Area Network, CAN)的簡稱,是由研發和生產汽車電子產品著稱的德國BOSCH公司開發了的,并最終成為國際標準(ISO118?8)。是國際上應用最廣泛的現場總線之一。 在北美和西歐,CAN總線協議已經成為汽車計算機控制系統和嵌入式工業控制局域網的標準總線,并且擁有以CAN為底層協議專為大型貨車和重工機械車輛設計的J1939協議。近年來,其所具有的高可靠性和良好的錯誤檢測能力受到重視,被廣泛應用于汽車計算機控制系統和環境溫度惡劣、電磁輻射強和振動大的工業環境。CAN與以太網采用的網絡協議,為計算機網絡中進行數據交換而建立的規則、標準或約定的集合。例如,網絡中一個微機用戶和一個大型主機的操作員進行通信,由于這兩個數據終端所用字符集不同,因此操作員所輸入的命令彼此不認識。為了能進行通信,規定每個終端都要將各自字符集中的字符先變換為標準字符集的字符后,才進入網絡傳送,到達目的終端之后,再變換為該終端字符集的字符。當然,對于不相容終端,除了需變換字符集字符外。其他特性,如顯示格式、行長、行數、屏幕滾動方式等也需作相應的變換。
1 網關的硬件設計
1.1 系統硬件結構
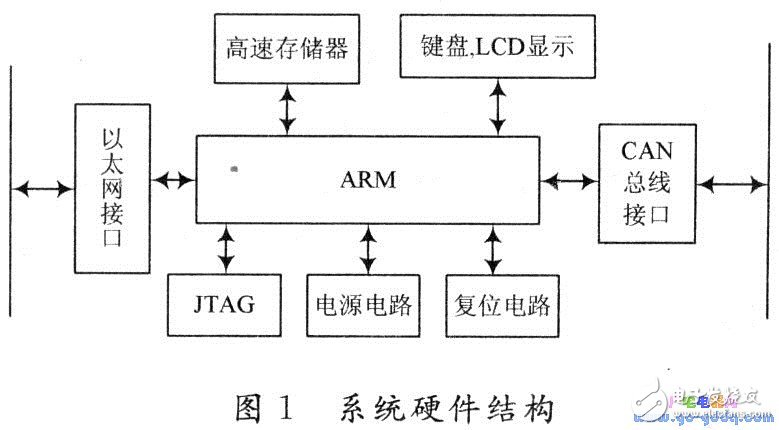
該系統的硬件部分主要由ARM、以太網接口、CAN接口、高速存儲器、JTAG口、復位電路和電源等組成,其系統硬件結構如圖1所示。ARM移植TCP/IP通信協議和CAN協議,可完成以太網協議和CAN總線協議轉換,實現以太網接口和CAN接口通信數據的透明傳輸。以太網(Ethernet)指的是由Xerox公司創建并由Xerox、Intel和DEC公司聯合開發的基帶局域網規范,是當今現有局域網采用的最通用的通信協議標準。以太網絡使用CSMA/CD(載波監聽多路訪問及沖突檢測)技術,并以10M/S的速率運行在多種類型的電纜上。以太網與IEEE802·3系列標準相類似。
1.2 主控制器的選擇
微處理器選用PhiIips公司ARM7TDMI內核的32位微控制器LPC2294,與一般單片機相比,LPC2294可嵌入操作系統。LPC2294內嵌256 KB的高速FLASH存儲器和16 KB的靜態RAM,多個外部中斷和串行口,LPC2294內部還集成了CAN控制器,只要加上CAN總線收發器就可以構成CAN節點,從而大大簡化了硬件電路。微處理器用一片或少數幾片大規模集成電路組成的中央處理器。這些電路執行控制部件和算術邏輯部件的功能。微處理器與傳統的中央處理器相比,具有體積小,重量輕和容易模塊化等優點。微處理器的基本組成部分有:寄存器堆、運算器、時序控制電路,以及數據和地址總線。微處理器能完成取指令、執行指令,以及與外界存儲器和邏輯部件交換信息等操作,是微型計算機的運算控制部分。它可與存儲器和外圍電路芯片組成微型計算機。自從人類1947年發明晶體管以來,50多年間半導體技術經歷了硅晶體管、集成電路、超大規模集成電路、甚大規模集成電路等幾代,發展速度之快是其他產業所沒有的。半導體技術對整個社會產生了廣泛的影響,因此被稱為“產業的種子”。中央處理器是指計算機內部對數據進行處理并對處理過程進行控制的部件,伴隨著大規模集成電路技術的迅速發展,芯片集成密度越來越高,CPU可以集成在一個半導體芯片上。
1.3 系統電源電路和復位電路
在該設計中,需要使用5 V,3.3 V和1.8 V的直流穩壓電源。其中,5 V電源由LM317L三端可調穩壓器產生;3.3 V和l_8 V電源由可調節輸出電壓的SPXlll7產生。系統復位電路的可靠性對整個系統的穩定起著非常重要的作用。在復位電路中采用了電壓監控芯片TPS383K33,它是10 ms或200。ms可選的上電復位發生器,具有防按鍵抖動的手動復位輸入功能,允許組成多個IC的菊花鏈電壓監控等。復位電路如圖2所示。圖2中,nRST連接到LPC2294的復位腳RESET;nTRST接以太網控制器ENC28J60的復位引腳。

1.4 CAN總線接口
CAN總線接口由LPC2294和CAN總線收發器等構成。這里采用帶隔離的高速cAN收發器CTMl050T,其主要功能是將CAN控制器的邏輯電平轉換為CAN總線的差分電平,并且具有(DC2500V)隔離功能、ESD保護功能及TVS管防總線過壓功能,其內帶隔離器,可減少外部相關電路的設計。CAN總線接口電路如圖3所示。CAN總線通過CAN收發器接口芯片82C250的兩個輸出端CANH和CANL與物理總線相連,而CANH端的狀態只能是高電平或懸浮狀態,CANL端只能是低電平或懸浮狀態。這就保證不會在出現在RS-485網絡中的現象,即當系統有錯誤,出現多節點同時向總線發送數據時,導致總線呈現短路,從而損壞某些節點的現象。而且CAN節點在錯誤嚴重的情況下具有自動關閉輸出功能,以使總線上其他節點的操作不受影響,從而保證不會出現象在網絡中,因個別節點出現問題,使得總線處于“死鎖”狀態。而且,CAN具有的完善的通信協議可由CAN控制器芯片及其接口芯片來實現,從而大大降低系統開發難度,縮短了開發周期,這些是僅有電氣協議的RS-485所無法比擬的。

1.5 以太網接口
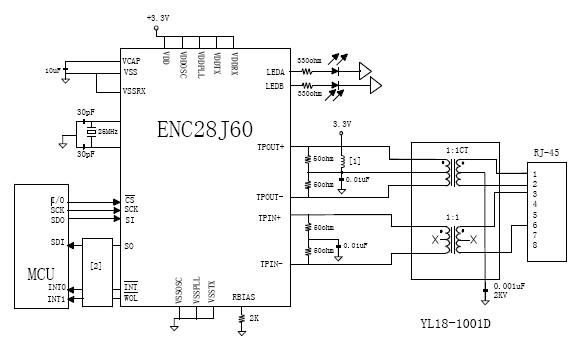
在系統設計中,采用ENC28J60作為網絡接口芯片。ENC28J60是美國微芯科技公司推出的28引腳獨立以太網控制器,內置以太網物理層器件(PHY)及介質訪問控制器(MAC),可按以太網協議可靠地收發信息包數據。另外,它還具有可編程8 KB雙端口SRAM緩沖器,數據傳輸速率高達10 Mb/s。ENC28J60具有多種集成功能,如CRC校驗、可編程過濾、可自動評價、接收或拒收多種信息包、數據濾波等功能,能高效率地進行信息包的存儲、檢索和修改,可減輕主控微處理器的內存負荷。ENC28J60采用標準的SPI串行接口,只需4條連線即可實現與微處理器相連,而且它只有28個引腳,可以大大簡化相關設計,減小空間。網絡插座采用RJ45插座HR911102A,其內置網絡變壓器、狀態顯示燈和電阻網絡,具有信號耦合電氣隔離、阻抗匹配、抑制干擾等特點,可提高系統抗干擾能力和收發的穩定性。以太網接口電路如圖4所示。圖4中ENC28J60的2個中斷引腳INT和WOL分別接LPC2294的EINTl,EINT2;ENC28J60的SPI腳SO,SI,SCK,CS分別接LPC2294的腳MISO1,MISll,SCKl,CSl,2個專用的引腳(LEDA,LEDB)用于連接HR911102A的LEDG,LEDY,進行網絡活動狀態指示。
1.6 外擴存儲器接口
由于LPC2294內部只有16 KB的RAM,不能滿足以太網數據存儲的空間要求,該設計擴展了256 KB的外部存儲器,選用RAMTRON公司的存儲器芯片FM25256。FM25256是采用先進的鐵電技術制造的非易失性存儲器,具有比其他非易失性存儲器高得多的讀寫操作次數,可以承受超過一萬億次的讀寫操作。存儲器接口電路如圖5所示。

圖5中FM25256的SPI腳SO,SI,SCK,CS分別與LPC2294的MISOO,MISl0,SCK0,CS2腳相連。寫保護引腳WP與LPC2294的P2.21相連。FM25256主要用來存儲以太網數據。
2 網關軟件設計
網關的軟件設計采用嵌入式操作系統μC/OS-Ⅱ,它具有較小的內核結構,開發成本小,執行效率高,移植也容易。初始化文件通過JTAG下載到網關并保存在FLASH中。
2.1 CAN通信軟件設計
該設計的關鍵是編寫CAN驅動程序,主程序通過調用CAN驅動程序實現接口數據的收發,驅動程序包括CAN控制器的初始化、接收數據、發送數據和總線異常處理。
2.1.1 CAN控制器的初始化
初始化操作包括硬件使能CAN、軟件復位、設備報警界限、設置總線波特率、設置中斷工作方式、設置CAN驗收過濾器工作方式、設置控制器的工作模式和啟動CAN等。LPC2294片內外設與引腳的連接由引腳連接模塊控制。CAN控制器的硬件使能就是通過軟件設備GPIO寄存器來控制多路開關,將特定的引腳與CAN控制器連接起來。
2.1.2 數據的接收與發送
LPC2294的每個CAN控制器中有3個發送緩沖區,發送數據時先查詢CANSR寄存器是否空閑,若空閑才能寫入數據,然后判斷報文的類型,根據報文類型調用相應的發送函數,即對數據進行封裝并寫入發送緩沖區,最后調用發送命令。為了提高效率,接收數據采用中斷方式,首先在CANopen的初始化程序中要使能接收中斷,當有中斷發生,讀取CANICR寄存器,判斷接收中斷標志是否置位。
2.1.3 異常處理
在總線發生嚴重故障的情況下,CAN節點脫離總線,此時下述寄存器位被置位為CANSR的BS位、CANIR的BEI位和EI位(如果使能)和CAN-MOD的RM位。RM將許多CAN控制器功能復位和禁止。軟件下一步必須置零RM位。發送錯誤計數器將遞減計數總線釋放條件(11個連續的隱性位)的第128個錯誤。
2.2 以太網通信軟件設計
2.2.1 ENC28J60的初始化
LPC2294。對ENC28J60的各種操作均通過SPI接口進行,包括寄存器的設置、數據的發送和接收。LPC2294的SPI工作在主動方式,即ENC28J60的SPI時鐘信號由LPC2294提供。
2.2.2 TCP/IP協議
該設計采用嵌入式系統中廣泛應用的LwIP協議棧。LwIP TCP/IP實現的特點是在保持協議主要功能的基礎上減少對RAM的占用,這使協議棧LwIP適合在低端嵌入式系統中使用。LwIP協議棧應用到的協議有ARP,IP,IcMP,TCP,UDP,其具有滑動窗口、擁塞控制和接收分片的分組功能。在LwIP中可以有多個網絡接口,每個網絡接口都對應一個strut netif()。netif包含了相應網絡接口的屬性、收發函數。采取調用netif的方法netif→inpln()及netif→output()進行以太網PACket的收、發等操作。
2.3 以太網/CAN雙向協議轉換
整個設計中最為關鍵的就是CAN協議與TCP/IP協議的相互轉換。協議轉換流程圖如圖6所示。
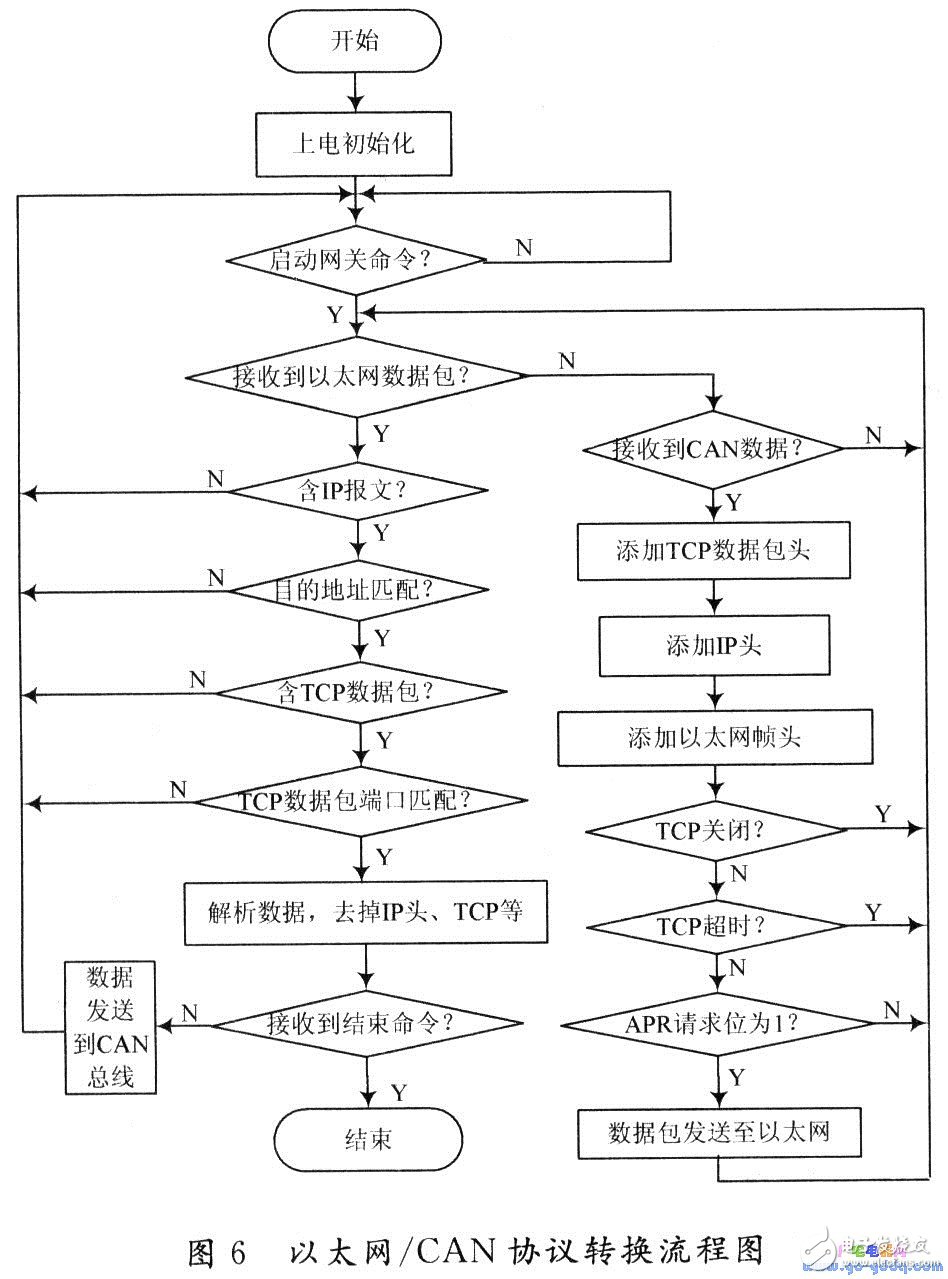
其具體過程如下:當網關接收到數據,首先判斷數據類型,如果是從CAN接口接收CAN協議報文,便分離出數據部分,再將報文數據部分按系統規定的應用層格式進行封裝,然后將應用層數據存入以太網接口發送緩沖區,由該接口在數據前面依次添加TCP或UDP頭、IP頭、以太幀頭,最后封裝成以太幀后,通過以太網接口發往以太網。若接收到的以太網數據,數據轉換過程相反,依次去掉IP頭、TCP或UDP頭和應用層頭,再將應用層數據按CAN報文格式封裝好后存入CAN接口發送緩沖區,由CAN接口發往CAN網絡中相應設備。若應用層數據長度大于8 B,則還需將數據以8 B為一組進行拆分。
3 結 語
符合IEEE802.3協議的ENC28J60不僅能提供以太網通信的相應功能,而且體積小,能夠簡化設計,可以設計出較小的嵌入式網關。用上述方法構建的通信網關可實現以太網與CAN總線之間的協議轉換,為以太網與CAN總線網絡的互聯提供了一種傳輸速度快,成本低,穩定性和安全性高的解決方案。
作者:陳雪梅,曾照福
(湖南科技大學 信息與電氣工程學院? 湖南 湘潭? 411201)











 工商網監
工商網監
評論