 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
引言
當(dāng)今社會,GPS衛(wèi)星定位系統(tǒng)早已廣泛應(yīng)用于人們的社會生活中,如交通工具導(dǎo)航、個(gè)人定位服務(wù)等。但在某些情況下,由于物體遮蔽、散射等原因,我們無法實(shí)時(shí)接收到GPS衛(wèi)星信號(比如列車進(jìn)入隧道)。所以有必要研究在GPS信息缺失的情況下,如何通過一定的算法產(chǎn)生模擬GPS信息,從而實(shí)現(xiàn)全天候的無縫位置感知。這在某些對位置信息敏感的場合中就顯得非常急迫和重要。
1 慣導(dǎo)芯片簡介
ADIS16003是ADI公司的一款低成本、低功耗,具有SPI接口的雙軸加速度計(jì),屬MEMS傳感器件。它可以測量動態(tài)和靜態(tài)加速度并以數(shù)字量輸出,測量范圍最小可以達(dá)到±1.7 g,同時(shí)還集成了溫度傳感器,可用于慣性導(dǎo)航、振動檢測和穩(wěn)定性測試等場合中。
SPI是串行外圍設(shè)備接口,是Motorola公司首先在其MC68HCXX系列處理器上定義的。目前已廣泛應(yīng)用在EEPROM、Flash、實(shí)時(shí)時(shí)鐘、A/D轉(zhuǎn)換器以及數(shù)字信號處理器和數(shù)字信號解碼器之間,是一種高速的全雙工同步通信總線。SPI通信只需要4根線,分別為SDI(數(shù)據(jù)輸入)、SDO(數(shù)據(jù)輸出)、SCK(時(shí)鐘)和CS(片選)。通信是通過數(shù)據(jù)交換的方式完成的。SPI接口使用串行通信協(xié)議,由SCK提供時(shí)鐘脈沖,SDI、SDO則基于此脈沖完成數(shù)據(jù)傳輸。數(shù)據(jù)輸出通過SDO線,數(shù)據(jù)在時(shí)鐘上升沿或下降沿時(shí)改變,在緊接著的下降沿或上升沿被讀取,完成一位數(shù)據(jù)傳輸。數(shù)據(jù)輸入也使用同樣的原理。
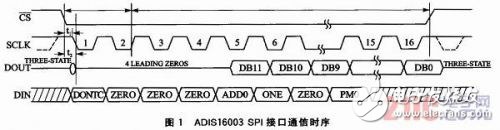

ADIS16003的SPI接口通信時(shí)序及控制寄存器配置如圖1、圖2所示。其中,常用控制字為00000100和00001100,分別表示以正常模式采集X軸和Y軸雙軸軸向加速度。
2 系統(tǒng)工作原理及主要控制信號說明
本文研究了如何在移動端GPS信息缺失的情況下,使用SPI協(xié)議建立FPGA與慣導(dǎo)芯片ADIS16003之間的通信,從而獲取移動物體當(dāng)前的加速度。DSP將通過EMIF接口讀取此加速度,并根據(jù)之前有效的GPS信息推算出當(dāng)前的概略GPS信息(經(jīng)緯度、速度和時(shí)間等)。
2.1 工作原理
FPGA驅(qū)動ADIS16003慣導(dǎo)芯片工作包括初始啟動和正常啟動兩種模式。
(1)初始啟動模式
FPGA上電復(fù)位時(shí)自啟動ADIS16003芯片,配置ADIS16003控制寄存器,并讀取芯片測得的雙軸軸向加速度初始值,存儲到EMIF接口的0x068~0x069地址空間供DSP讀取,用作誤差校正之用(此模式工作在移動端處于靜止?fàn)顟B(tài)時(shí),且此模式僅由DSP讀取1次)。
(2)正常啟動模式
初始啟動模式完成之后,F(xiàn)PGA將自動轉(zhuǎn)入數(shù)據(jù)采集階段,源源不斷地通過SPI接口從ADIS16003芯片中采集雙軸軸向瞬時(shí)加速度,以備DSP使用。加速度每秒采集8次,每隔0.125 s采集一次。每秒都將得到8組結(jié)果,分別為ax0ay0、ax1ay1、ay2ay2、ax3ay3、ax4ay4、ax5ay5、ax6ay6和ax7ay7,存儲于FGPA內(nèi)部的8個(gè)中間寄存器單元reg0~reg7(非EMIF接口,每個(gè)輸出結(jié)果為12×2位,存儲于32位的寄存器組中),并隨著時(shí)間的推移不斷地刷新。這么做的目的是確保這8個(gè)寄存器組中始終保存有最近1 s的移動物體加速度信息,以保證加速度信息的準(zhǔn)確性和有效性。當(dāng)CPU通過GPS接收天線檢測到GPS信息丟失時(shí),CPU通過PCI接口給FPGA配入spi_cmd_val信號(高電平有效),同時(shí)通過HPI接口給DSP寫入信息丟失前2 s的GPS信息(包括經(jīng)緯度、速度和時(shí)間),作為定位基點(diǎn)。FPGA檢測到spi_cmd_val信號有效后,立即將中間寄存器單元reg0~reg7中存儲的瞬時(shí)加速度送入EMIF接口的0x060~0x067地址單元(32位),同時(shí)拉高int_spi_done信號,產(chǎn)生外部中斷(拉低DSP的引腳)通知DSP從EMIF接口讀取加速度信息,并通過后續(xù)軟件算法進(jìn)行信號處理,轉(zhuǎn)化為移動端經(jīng)緯度信息。再通過DSP的HPI接口上報(bào)給CPU,從而使高層獲取移動端當(dāng)前GPS信息,即完成了GPS位置信息的模擬。加速度存儲格式如表1所列。其中包括初始和瞬時(shí)加速度值,共占用32位EMIF接口10個(gè)地址單元。

2.2 主要控制信號說明
①spi_cmd_data:ADIS16003芯片控制字(寄存器),8位,F(xiàn)PGA配入。
②spi_cmd_val:GPS信號缺失時(shí)ADIS16003啟動信號,CPU發(fā)出,脈沖觸發(fā)。
③spi_cmd_val_reg:ADIS16003啟動信號寄存器,及時(shí)存儲觸發(fā)脈沖,持續(xù)一個(gè)時(shí)鐘后清0。
④spi_data_i:ADIS16003串行輸出信號,包括雙軸軸向加速度,每個(gè)spi_clk時(shí)鐘下降沿輸出一位,16個(gè)時(shí)鐘周期完成一次運(yùn)算。
⑤spi_cs:SPI片選信號,低電平有效。
⑥spi_clk:SPI通信時(shí)鐘信號,由主時(shí)鐘分頻得到,此處進(jìn)行32分頻。
⑦spi_data_o:ADIS16003控制字輸入信號,8位串行輸出,spi_clk時(shí)鐘上升沿動作。
⑧spi_rdata:ADIS16003運(yùn)算結(jié)果,12位,每個(gè)spi_clk下降沿輸出一位,采取移位拼接方式(向左移),在第16個(gè)時(shí)鐘下降沿輸出一次完整的采集結(jié)果(每次采集至少需要16個(gè)時(shí)鐘周期)。
⑨spi_state:SPI工作狀態(tài)信號,0為IDLE,1為BUSY,2為DONE,采用有限狀態(tài)機(jī)進(jìn)行設(shè)計(jì)。
⑩spi_wr_cnt_o、spi_wr_cnt_i:十六進(jìn)制計(jì)數(shù)器,時(shí)鐘上升沿和下降沿分別計(jì)數(shù)。
當(dāng)今社會,GPS衛(wèi)星定位系統(tǒng)早已廣泛應(yīng)用于人們的社會生活中,如交通工具導(dǎo)航、個(gè)人定位服務(wù)等。但在某些情況下,由于物體遮蔽、散射等原因,我們無法實(shí)時(shí)接收到GPS衛(wèi)星信號(比如列車進(jìn)入隧道)。所以有必要研究在GPS信息缺失的情況下,如何通過一定的算法產(chǎn)生模擬GPS信息,從而實(shí)現(xiàn)全天候的無縫位置感知。這在某些對位置信息敏感的場合中就顯得非常急迫和重要。
1 慣導(dǎo)芯片簡介
ADIS16003是ADI公司的一款低成本、低功耗,具有SPI接口的雙軸加速度計(jì),屬MEMS傳感器件。它可以測量動態(tài)和靜態(tài)加速度并以數(shù)字量輸出,測量范圍最小可以達(dá)到±1.7 g,同時(shí)還集成了溫度傳感器,可用于慣性導(dǎo)航、振動檢測和穩(wěn)定性測試等場合中。
SPI是串行外圍設(shè)備接口,是Motorola公司首先在其MC68HCXX系列處理器上定義的。目前已廣泛應(yīng)用在EEPROM、Flash、實(shí)時(shí)時(shí)鐘、A/D轉(zhuǎn)換器以及數(shù)字信號處理器和數(shù)字信號解碼器之間,是一種高速的全雙工同步通信總線。SPI通信只需要4根線,分別為SDI(數(shù)據(jù)輸入)、SDO(數(shù)據(jù)輸出)、SCK(時(shí)鐘)和CS(片選)。通信是通過數(shù)據(jù)交換的方式完成的。SPI接口使用串行通信協(xié)議,由SCK提供時(shí)鐘脈沖,SDI、SDO則基于此脈沖完成數(shù)據(jù)傳輸。數(shù)據(jù)輸出通過SDO線,數(shù)據(jù)在時(shí)鐘上升沿或下降沿時(shí)改變,在緊接著的下降沿或上升沿被讀取,完成一位數(shù)據(jù)傳輸。數(shù)據(jù)輸入也使用同樣的原理。
ADIS16003的SPI接口通信時(shí)序及控制寄存器配置如圖1、圖2所示。其中,常用控制字為00000100和00001100,分別表示以正常模式采集X軸和Y軸雙軸軸向加速度。
2 系統(tǒng)工作原理及主要控制信號說明
本文研究了如何在移動端GPS信息缺失的情況下,使用SPI協(xié)議建立FPGA與慣導(dǎo)芯片ADIS16003之間的通信,從而獲取移動物體當(dāng)前的加速度。DSP將通過EMIF接口讀取此加速度,并根據(jù)之前有效的GPS信息推算出當(dāng)前的概略GPS信息(經(jīng)緯度、速度和時(shí)間等)。
2.1 工作原理
FPGA驅(qū)動ADIS16003慣導(dǎo)芯片工作包括初始啟動和正常啟動兩種模式。
(1)初始啟動模式
FPGA上電復(fù)位時(shí)自啟動ADIS16003芯片,配置ADIS16003控制寄存器,并讀取芯片測得的雙軸軸向加速度初始值,存儲到EMIF接口的0x068~0x069地址空間供DSP讀取,用作誤差校正之用(此模式工作在移動端處于靜止?fàn)顟B(tài)時(shí),且此模式僅由DSP讀取1次)。
(2)正常啟動模式
初始啟動模式完成之后,F(xiàn)PGA將自動轉(zhuǎn)入數(shù)據(jù)采集階段,源源不斷地通過SPI接口從ADIS16003芯片中采集雙軸軸向瞬時(shí)加速度,以備DSP使用。加速度每秒采集8次,每隔0.125 s采集一次。每秒都將得到8組結(jié)果,分別為ax0ay0、ax1ay1、ay2ay2、ax3ay3、ax4ay4、ax5ay5、ax6ay6和ax7ay7,存儲于FGPA內(nèi)部的8個(gè)中間寄存器單元reg0~reg7(非EMIF接口,每個(gè)輸出結(jié)果為12×2位,存儲于32位的寄存器組中),并隨著時(shí)間的推移不斷地刷新。這么做的目的是確保這8個(gè)寄存器組中始終保存有最近1 s的移動物體加速度信息,以保證加速度信息的準(zhǔn)確性和有效性。當(dāng)CPU通過GPS接收天線檢測到GPS信息丟失時(shí),CPU通過PCI接口給FPGA配入spi_cmd_val信號(高電平有效),同時(shí)通過HPI接口給DSP寫入信息丟失前2 s的GPS信息(包括經(jīng)緯度、速度和時(shí)間),作為定位基點(diǎn)。FPGA檢測到spi_cmd_val信號有效后,立即將中間寄存器單元reg0~reg7中存儲的瞬時(shí)加速度送入EMIF接口的0x060~0x067地址單元(32位),同時(shí)拉高int_spi_done信號,產(chǎn)生外部中斷(拉低DSP的引腳)通知DSP從EMIF接口讀取加速度信息,并通過后續(xù)軟件算法進(jìn)行信號處理,轉(zhuǎn)化為移動端經(jīng)緯度信息。再通過DSP的HPI接口上報(bào)給CPU,從而使高層獲取移動端當(dāng)前GPS信息,即完成了GPS位置信息的模擬。加速度存儲格式如表1所列。其中包括初始和瞬時(shí)加速度值,共占用32位EMIF接口10個(gè)地址單元。
2.2 主要控制信號說明
①spi_cmd_data:ADIS16003芯片控制字(寄存器),8位,F(xiàn)PGA配入。
②spi_cmd_val:GPS信號缺失時(shí)ADIS16003啟動信號,CPU發(fā)出,脈沖觸發(fā)。
③spi_cmd_val_reg:ADIS16003啟動信號寄存器,及時(shí)存儲觸發(fā)脈沖,持續(xù)一個(gè)時(shí)鐘后清0。
④spi_data_i:ADIS16003串行輸出信號,包括雙軸軸向加速度,每個(gè)spi_clk時(shí)鐘下降沿輸出一位,16個(gè)時(shí)鐘周期完成一次運(yùn)算。
⑤spi_cs:SPI片選信號,低電平有效。
⑥spi_clk:SPI通信時(shí)鐘信號,由主時(shí)鐘分頻得到,此處進(jìn)行32分頻。
⑦spi_data_o:ADIS16003控制字輸入信號,8位串行輸出,spi_clk時(shí)鐘上升沿動作。
⑧spi_rdata:ADIS16003運(yùn)算結(jié)果,12位,每個(gè)spi_clk下降沿輸出一位,采取移位拼接方式(向左移),在第16個(gè)時(shí)鐘下降沿輸出一次完整的采集結(jié)果(每次采集至少需要16個(gè)時(shí)鐘周期)。
⑨spi_state:SPI工作狀態(tài)信號,0為IDLE,1為BUSY,2為DONE,采用有限狀態(tài)機(jī)進(jìn)行設(shè)計(jì)。
⑩spi_wr_cnt_o、spi_wr_cnt_i:十六進(jìn)制計(jì)數(shù)器,時(shí)鐘上升沿和下降沿分別計(jì)數(shù)。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- MEMS陀螺捷聯(lián)慣導(dǎo)系統(tǒng)標(biāo)定方法綜述 5次下載
- 基于位置信息的多車協(xié)同碰撞預(yù)警協(xié)議綜述 8次下載
- 一種基于用戶位置信息的導(dǎo)頻分配方法 13次下載
- 如何進(jìn)行慣性導(dǎo)航系統(tǒng)的誤差估計(jì)詳細(xì)方法說明 15次下載
- 慣導(dǎo)模塊工作原理分析 40次下載
- 基于用戶位置信息的導(dǎo)頻分配 0次下載
- 卡爾曼濾波在慣導(dǎo)初始對準(zhǔn)中的應(yīng)用 3次下載
- 基于位置信息的流式引動應(yīng)用推送系統(tǒng) 0次下載
- Android取證中地理位置信息提取分析實(shí)現(xiàn) 0次下載
- MEMS傳感器的捷聯(lián)慣導(dǎo)系統(tǒng)設(shè)計(jì)中的應(yīng)用 22次下載
- GPS設(shè)備術(shù)語解析 6次下載
- C語言教程之查找位置信息 0次下載
- 基于SOPC技術(shù)的SRM位置信息及速度檢測
- 基于FPGA的慣導(dǎo)系統(tǒng)溫控電路接口設(shè)計(jì)
- 高精度游移方位捷聯(lián)慣導(dǎo)系統(tǒng)的數(shù)字仿真
- 什么是gps定位? gps定位放線的步驟有哪些 6824次閱讀
- 華為交換機(jī)如何批量清除接口配置信息 3184次閱讀
- 一個(gè)利用GT-SAM的緊耦合激光雷達(dá)慣導(dǎo)里程計(jì)的框架 2450次閱讀
- 基于LPC2210芯片和uClinux實(shí)現(xiàn)導(dǎo)航定位信息獲取模塊的設(shè)計(jì) 1863次閱讀
- 簡易GPS車輛跟蹤系統(tǒng)的工作原理、組成及應(yīng)用設(shè)計(jì) 3819次閱讀
- 基于觸摸屏和RS-232串口實(shí)現(xiàn)捷聯(lián)慣導(dǎo)顯控系統(tǒng)的設(shè)計(jì) 3576次閱讀
- 基于TMS320C5410和ADuC834微處理器實(shí)現(xiàn)壓電捷聯(lián)慣導(dǎo)系統(tǒng)的設(shè)計(jì) 1556次閱讀
- 基于電機(jī)無位置傳感器控制實(shí)現(xiàn)換相控制電路的設(shè)計(jì) 1929次閱讀
- 基于GPRS模塊單片機(jī)獲取位置信息的方法 3026次閱讀
- GPS時(shí)鐘系統(tǒng)工作原理_GPS時(shí)種裝置的特點(diǎn) 1.1w次閱讀
- 如何復(fù)用原有設(shè)計(jì)中Block的位置 2947次閱讀
- 基于ARM920處理器和嵌入式Linux操作系統(tǒng)的GPS智能終端設(shè)計(jì)解析 1767次閱讀
- 三分鐘了解慣性導(dǎo)航系統(tǒng)、加速度計(jì)、陀螺儀的工作原理 6.9w次閱讀
- 慣性導(dǎo)航系統(tǒng)工作原理及應(yīng)用 1.7w次閱讀
- 基于STM32的語音導(dǎo)覽系統(tǒng)的設(shè)計(jì) 1956次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1491次下載 | 免費(fèi)
- 2單片機(jī)典型實(shí)例介紹
- 18.19 MB | 95次下載 | 1 積分
- 3S7-200PLC編程實(shí)例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 11次下載 | 免費(fèi)
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7基于單片機(jī)和 SG3525的程控開關(guān)電源設(shè)計(jì)
- 0.23 MB | 4次下載 | 免費(fèi)
- 8基于AT89C2051/4051單片機(jī)編程器的實(shí)驗(yàn)
- 0.11 MB | 4次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21539次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183277次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論