 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
介紹
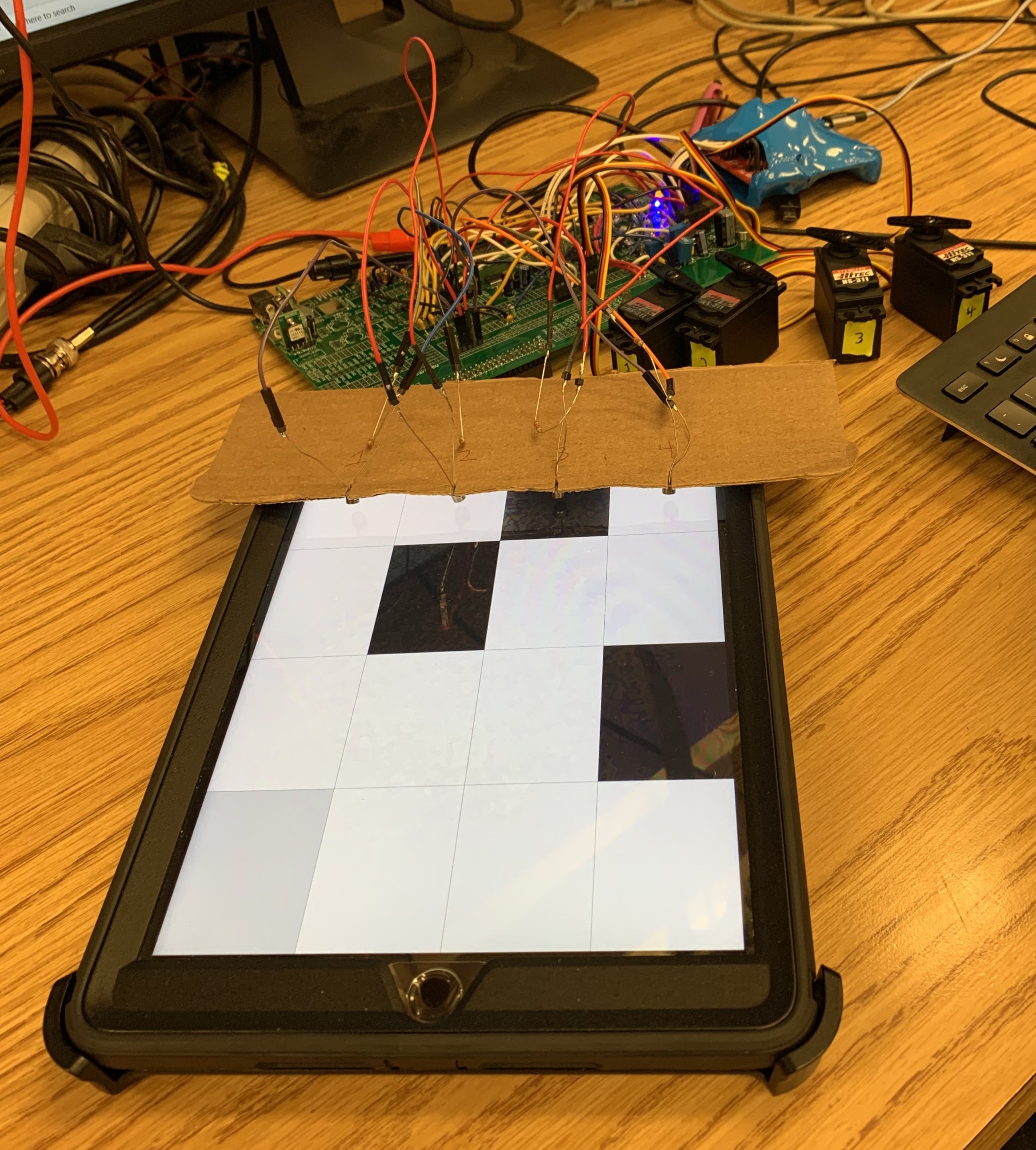
Tile Tapper 是一款完全由 TI MSP430 控制的機器人,旨在播放 iPad 應用程序“Piano Tiles”。為此,使用光敏電阻來確定穿過屏幕的給定圖塊是黑色還是白色。然后,四個相應的電機使用此信息來敲擊觸控筆并在正確的時間敲擊瓷磚。
守則_
定時器 A:發生在 MSP430 定時器 A 中,ADC10 DTC(模數轉換器,數據傳輸控制)用于讀取四個光敏電阻并將它們的值每 0.5 毫秒發送到一個全局四元素整數數組。在 ADC10 ISR(中斷服務程序)中,這四個光敏電阻與特定電機相關聯并為其讀數指定閾值。這些閾值決定電機看到的是白色還是黑色,從而決定手寫筆是否應該在屏幕上輕敲。
定時器 B:在定時器 B 中同時發生,“向上”或“向下”命令用于使用每個電機的數字 I/O 引腳設置手動 PWM 信號的占空比。時鐘每 20 毫秒循環一次計數器,以創建 50 Hz 的 PWM 頻率,這是伺服電機所要求的。
機械設計
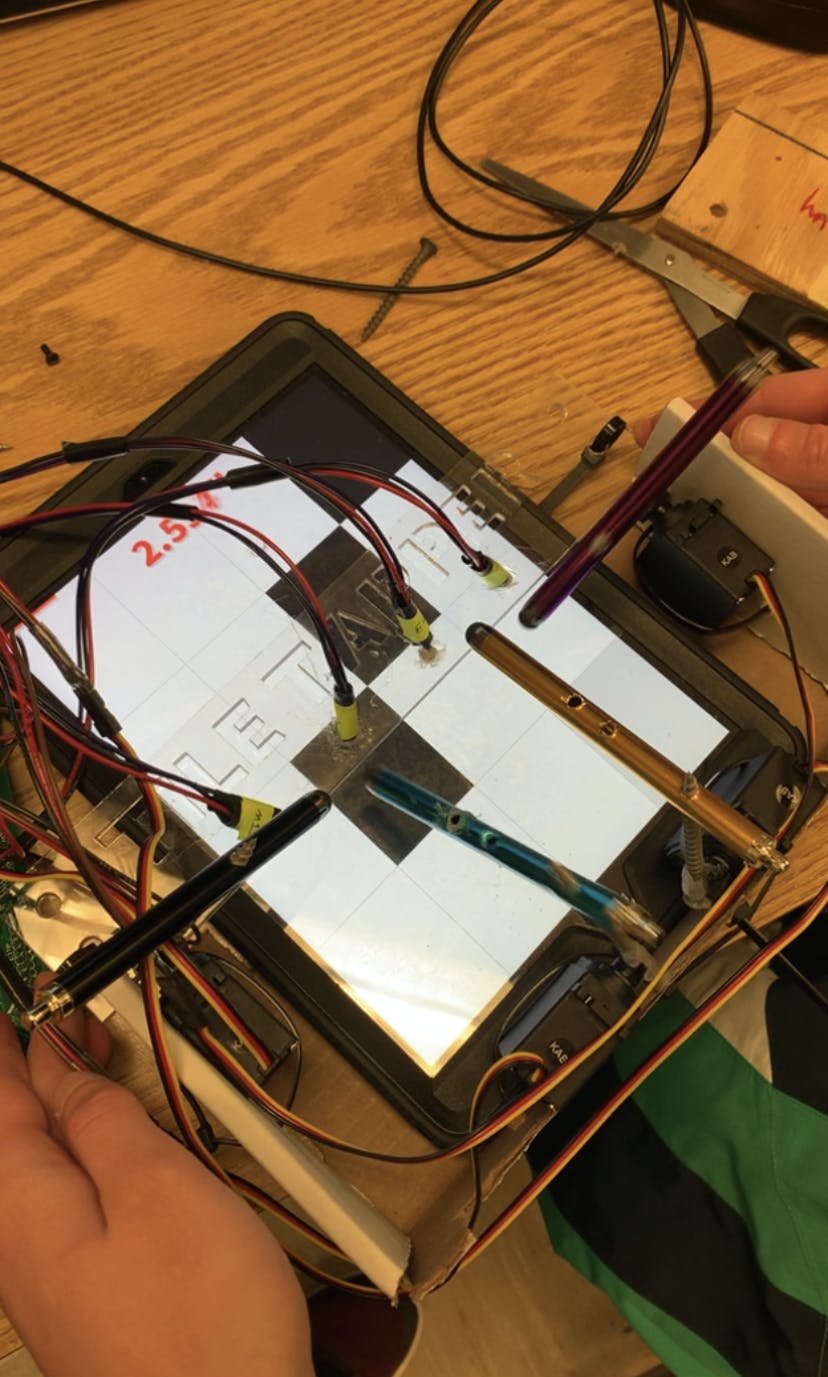
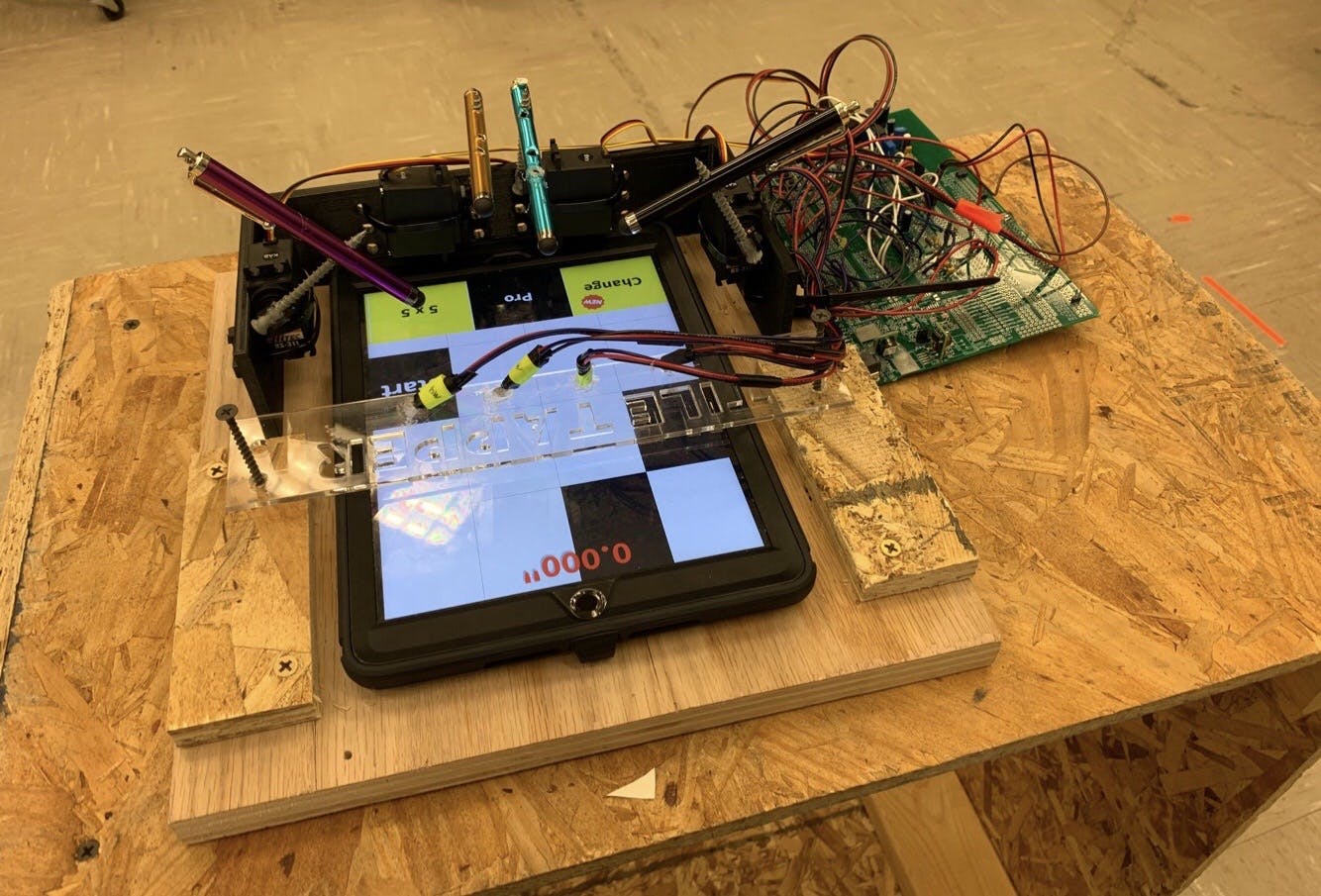
最初的原型是使用卡板、扎帶和膠水制成的,以便快速組裝。這允許有效的概念驗證,并最終確定最終設計的電機、光敏電阻和電線長度的位置。在圖 2 和圖 3 中,顯示了光敏電阻支架和電機外殼的紙板原型。對于最終設計,3D 打印用于制造將電機固定到位的外殼。亞克力被切割并用于將光敏電阻固定在瓷磚列上方,以讀取四行每一行中的瓷磚。最終原型如圖 4 所示。
痛點
軟件:
在該項目中要解決的最突出問題是 MSP430 上可用的定時器數量有限。知道定時器 A 最終將僅用于讀取光敏電阻并使用 ADC10 DTC 全局存儲它們,確定如何在一個定時器內使用 PWM 信號控制所有四個伺服電機成為一項挑戰。這一挑戰最終通過在正確的時間手動設置數字 I/O 引腳的高電平和低電平來為電機創建必要的 PWM 信號來解決。
下一個挑戰是確定計時器的合適速度。最初,兩個定時器都使用 0.1 毫秒的時鐘周期,因此光敏電阻會快速更新,伺服電機幾乎會立即響應。伺服電機需要頻率為 50 Hz 或周期為 20 ms 的輸入信號。使用 0.1 毫秒的時鐘周期允許我們使用 200 個時鐘周期來產生我們的 PWM 周期。可以使用 3% - 13% 或 6 - 26 個時鐘周期高電平的 PWM 占空比控制整個范圍的伺服電機,而其余時鐘周期則為低電平。
0.1 毫秒的時鐘周期最終成為問題,因為微處理器無法在 DTC 中進行采樣和轉換,也無法足夠快地切換 I/O 引腳以產生 50 Hz 的頻率,從而導致電機無法使用。
最終時鐘周期為 0.5 毫秒,這是采樣速度與 MSP430 產生 50 Hz PWM 的能力之間的平衡。該時鐘周期對應于 40 個時鐘周期的 PWM 周期。雖然這仍然是播放 Piano Tiles 的相對較慢的速度并且限制了 PWM 占空比的可用選項(2-5 個周期對應于僅 4 個觸控筆角度),但它允許光敏電阻讀數和占空比設置之間相對較快的響應時間。
硬件:
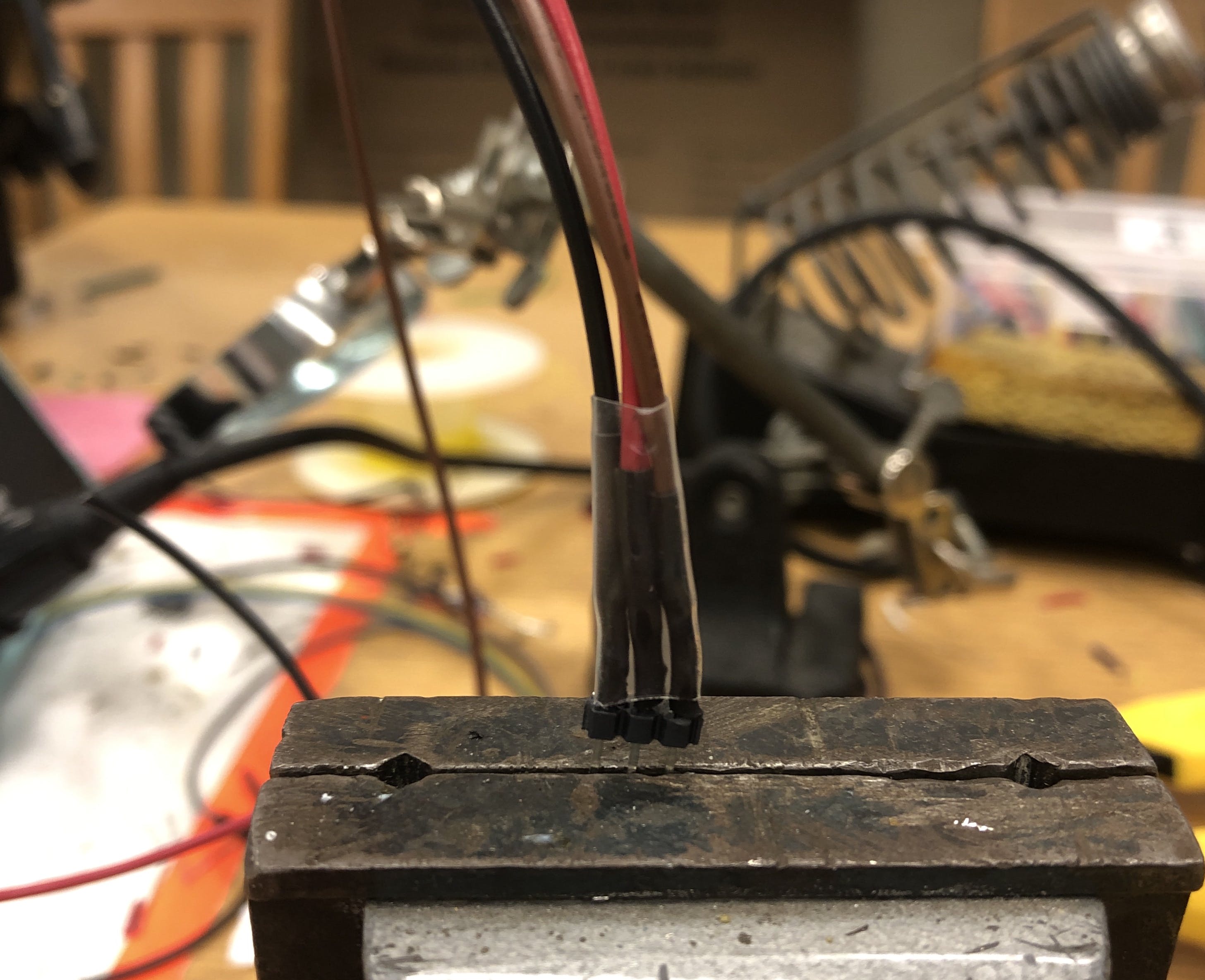
在為該項目編譯和微調軟件后,組件裝配和約束出現了一些問題。首先要解決的問題之一是使用的備用伺服電機的電線長度以及連接光敏電阻的電線長度。連接到電機的三線帶相當短,如果不從多個方向拉動電路板,很難將所有電機定位在 iPad 周圍。為了解決這個問題,將延長線與每根電線收縮管焊接在一起以避免短路。這些是我們功能性總裝的關鍵組成部分。下面的圖 5 顯示了這些延長線之一的一端圖像。進行了類似的焊接以延長連接到光敏電阻的電線。
另一個痛點是 iPad 本身周圍的電機和光敏電阻的限制。
結論
在開展此項目時,M&P430 團隊探索了如何將 MSP430 應用于從業余電子產品到現實技術的廣泛項目。該項目將處理器推向了極限,平衡了處理能力和速度,以實現其設計目標。
- 玩轉TI MSP430 LaunchPad
- 基于msp430單片機的小型貨運機器人設計資料 1次下載
- MSP430管理電源排序和控制
- msp430控制步進電機的詳細程序下載 26次下載
- MSP430單片機實踐篇之MSP430單片機ADC模數轉換操作 43次下載
- MSP430移動式彈跳機器人控制系統設計詳析 11次下載
- 基于兩自由度髖關節運動和MSP430單片機的機器人假肢控制系統 9次下載
- TI 培訓 MSP430 LaunchPad 教程資料 24次下載
- 基于MSP430的自主式移動機器人設計與實現 8次下載
- TI MSP430經典例程講解 45次下載
- 基于MSP430F1232自主移動機器人應用研究 2次下載
- 基于MSP430F6638的機器人微控制實驗報告 5次下載
- 基于MSP430F2234微型機器人無線控制系統 12次下載
- TI MSP430的倒車雷達系統設計 72次下載
- msp430封裝庫
- 如何為MSP430設計固件以收集和處理IC的數據 2160次閱讀
- 基于MSP430單片機實現六自由度機械手模塊的設計 3169次閱讀
- 基于MSP430系列單片機的常用程序編寫總結 4133次閱讀
- MSP430的中斷分為哪3種?MSP430的中斷優先級順序是什么樣的? 1.9w次閱讀
- MSP430有哪些可屏蔽中斷_MSP430中斷的優先級 2955次閱讀
- msp430無刷電機控制設計電路 9433次閱讀
- 基于MSP430的SPI驅動編寫之用MSP430驅動AFE4400 5356次閱讀
- MSP430單片機的選型及系列介紹 1.7w次閱讀
- MSP430低功耗運行模式原理分析及應用 9528次閱讀
- msp430介紹_msp430上拉電阻的使用 6852次閱讀
- MSP430單片機的端口介紹 5487次閱讀
- msp430學習的深度解析和總結 7240次閱讀
- 基于MSP430的函數信號發生器設計方案 4474次閱讀
- TI將藍牙解決方案與MSP430單片機結合 3577次閱讀
- MSP430電路圖集錦:創新設計思維 1.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 2PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 3PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 4dsPIC33EDV64MC205電機控制開發板用戶指南
- 5.78MB | 8次下載 | 免費
- 5STC15系列常用寄存器匯總免費下載
- 1.60 MB | 7次下載 | 5 積分
- 6模擬電路仿真實現
- 2.94MB | 4次下載 | 免費
- 7PCB圖繪制實例操作
- 2.92MB | 2次下載 | 免費
- 8零死角玩轉STM32F103—指南者
- 26.78 MB | 1次下載 | 1 積分
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 452次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 141次下載 | 1 積分
- 3基于STM32單片機智能手環心率計步器體溫顯示設計
- 0.10 MB | 137次下載 | 免費
- 4A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 5PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 6如何正確測試電源的紋波
- 0.36 MB | 19次下載 | 免費
- 7PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 8Q/SQR E8-4-2024乘用車電子電器零部件及子系統EMC試驗方法及要求
- 1.97 MB | 8次下載 | 10 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論