 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
由您決定要向機器人添加多少額外的小工具。但不管你是否添加更多東西,請記住基本/MVP 機器人已經是學習如何編碼的一個很好的開始。讓我們看看如何開始創建自己的 Beaglebone 機器人并學習使用 BluPants 進行編碼。
零件(基本機器人)
基本機器人是可與 BluPants 一起使用的最小可行產品 (MVP)。它只會在所有方向上導航(前進、后退、左轉和右轉)。它是您將來用于構建更復雜的機器人的基礎。
建議先組裝 MVP,然后隨著經驗的增加添加額外的功能(距離傳感器、抓爪、攝像頭、額外的伺服系統等)。額外功能的部分在“此項目中使用的東西”部分標記為“可選”。
對于基本的 MVP 機器人,我們將需要以下部件:
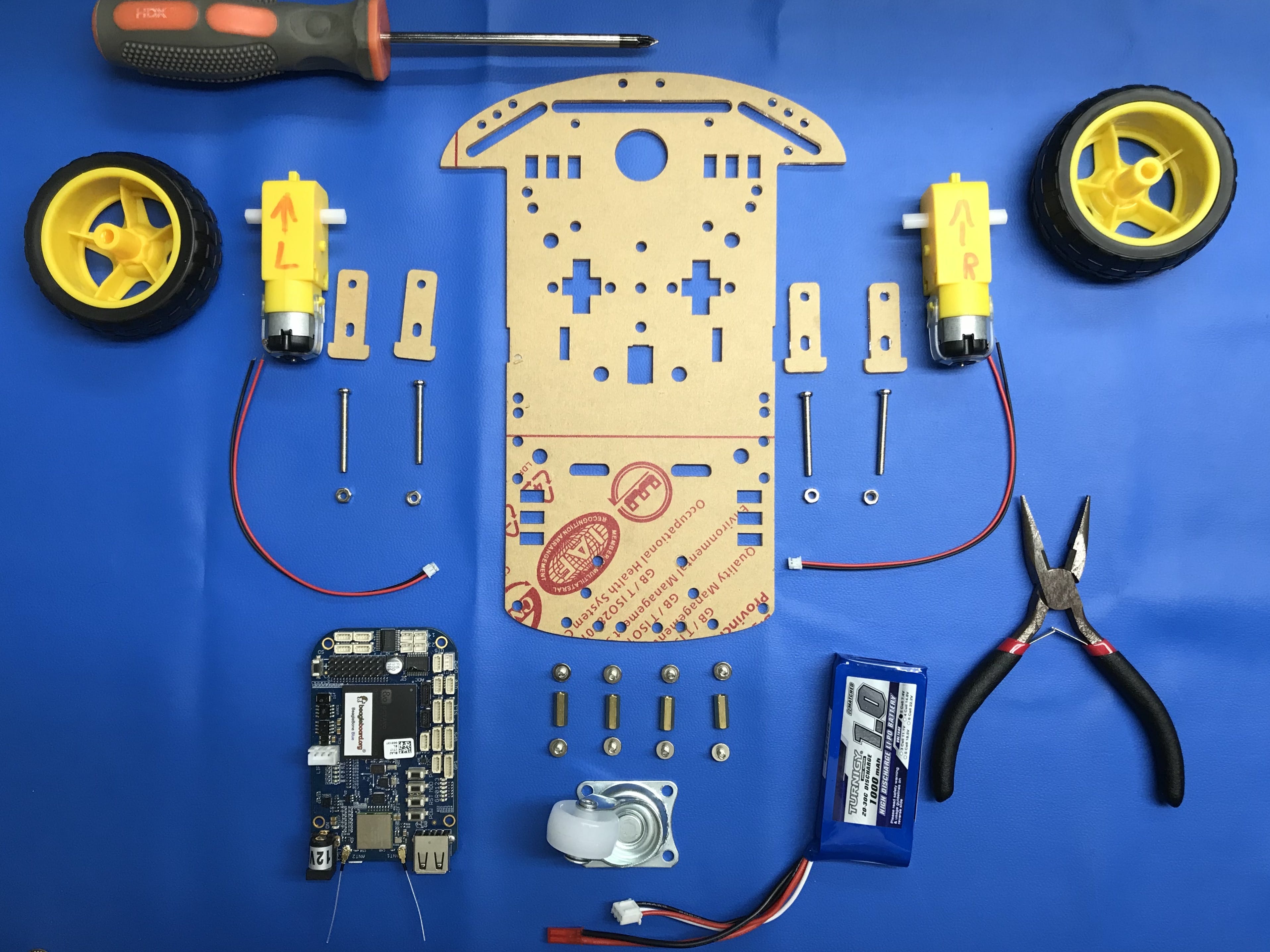
現在我們知道了我們需要什么,在進行實際組裝之前我們只需要做一件事:檢查電機極性。無論您使用何種文檔,只要確保將正確的BluPants 映像文件閃存到您的 SD 卡即可。
將電機連接到 Beaglebone
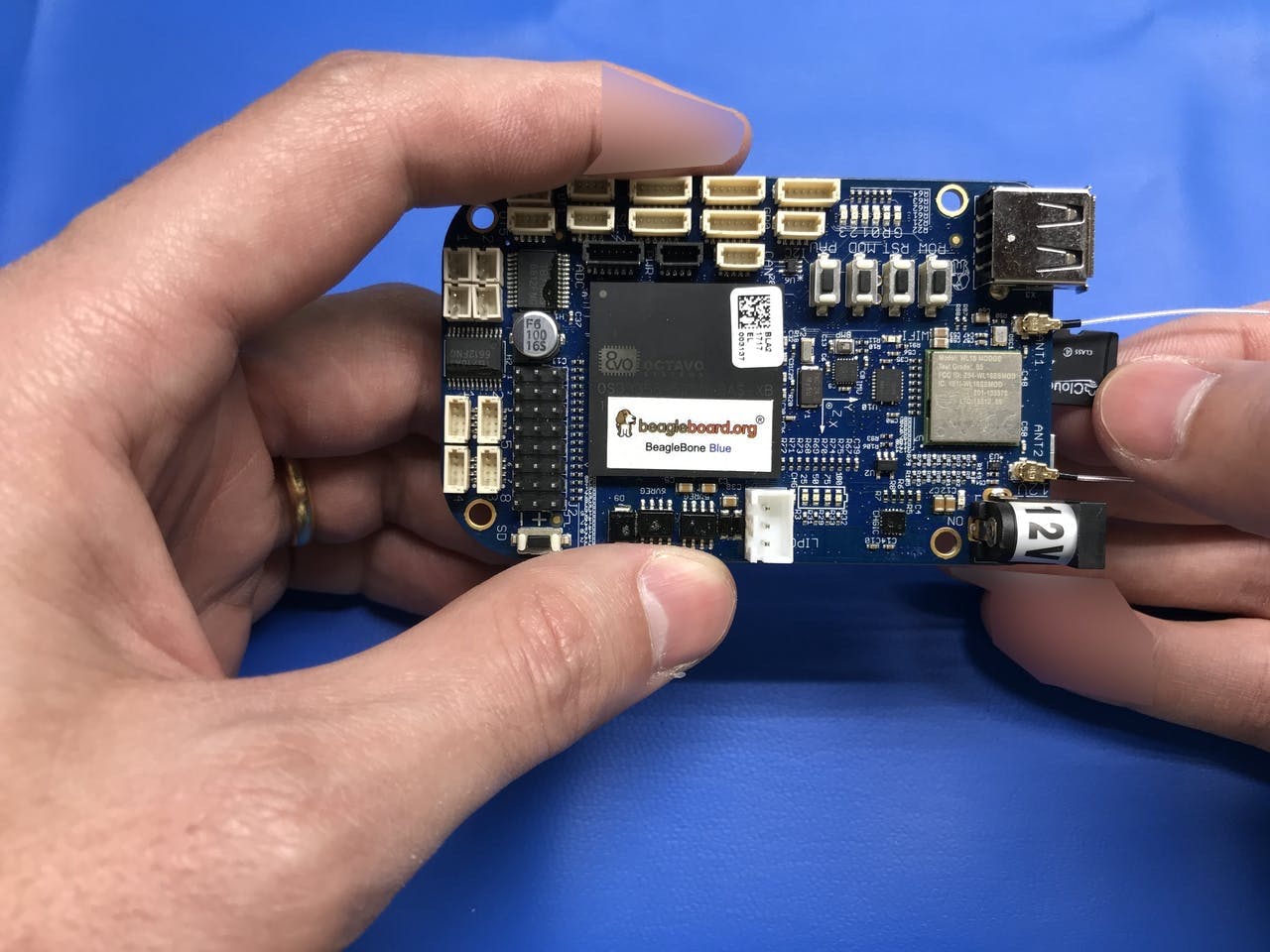
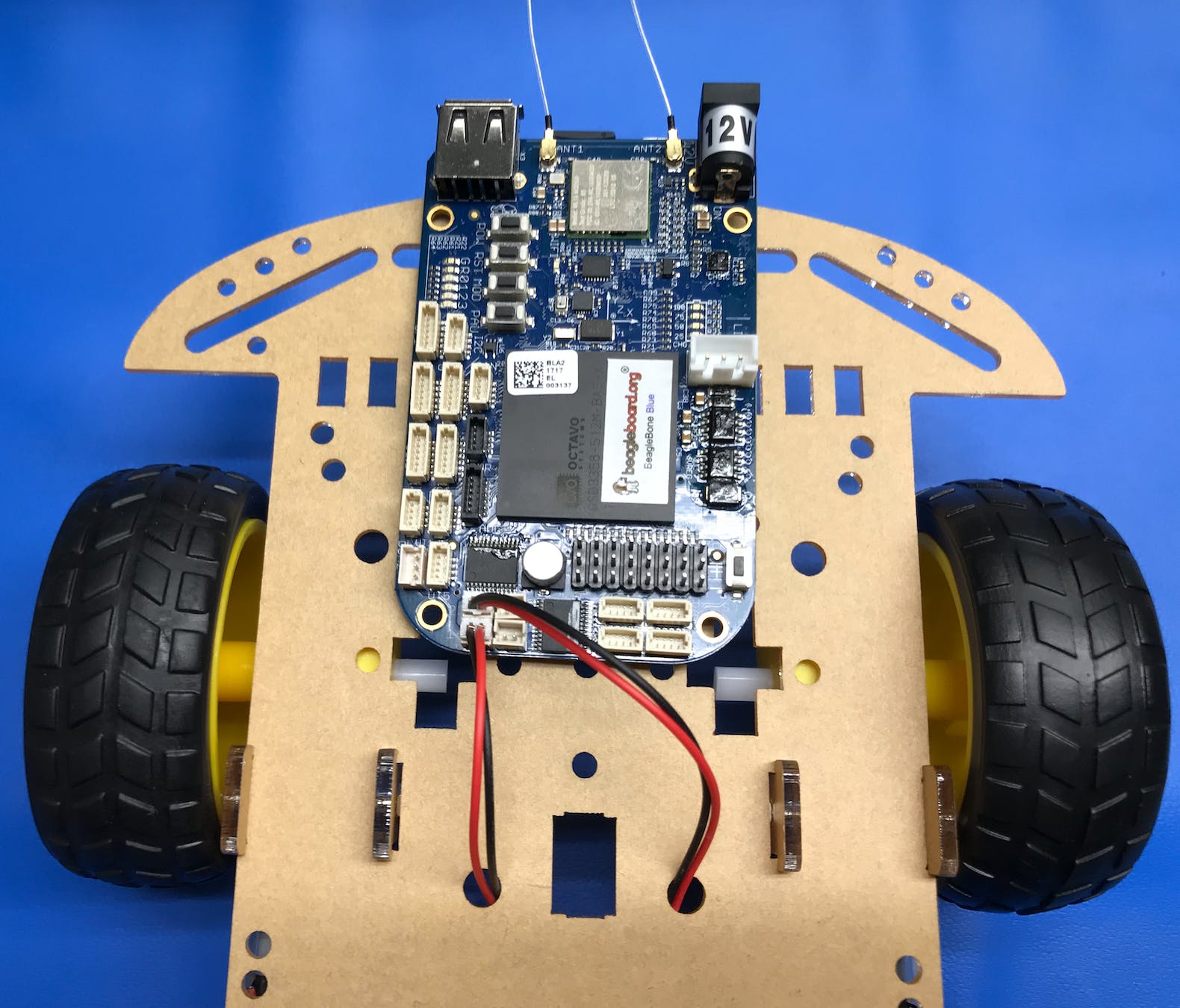
準備好 SD 卡和最新的 BluPants 映像后,關閉 Beaglebone Blue 電源,然后將卡插入板上,如下圖所示。
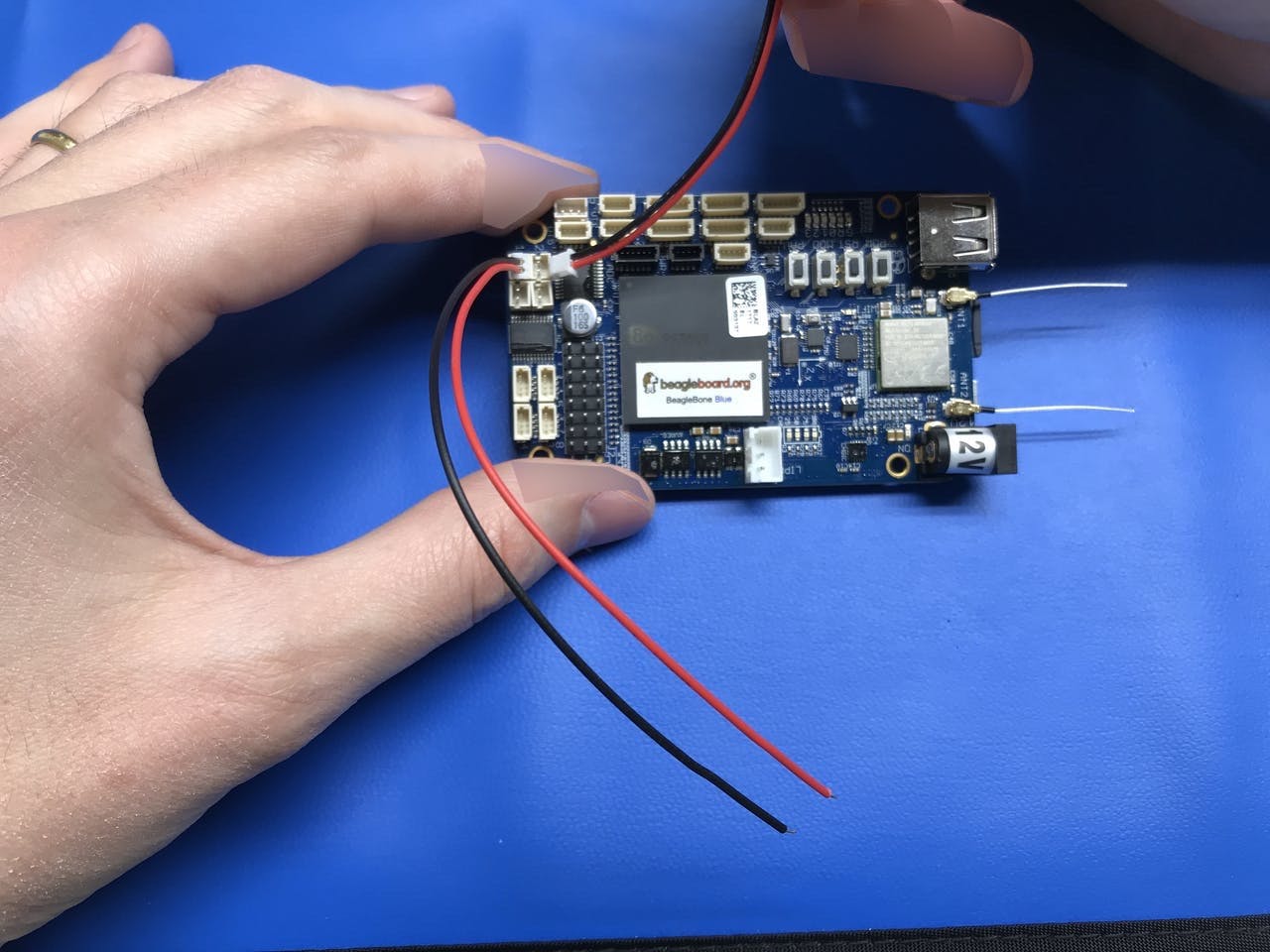
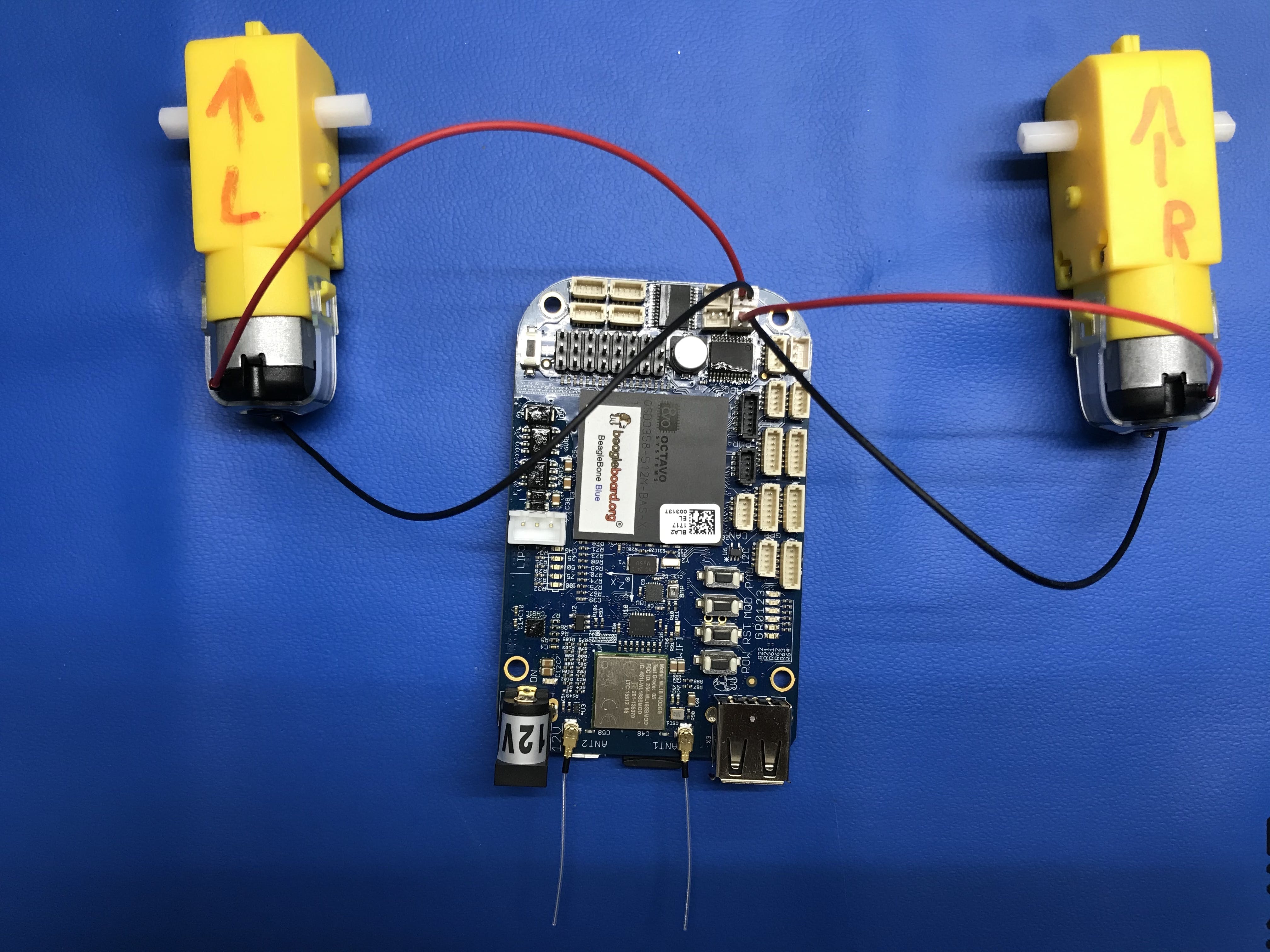
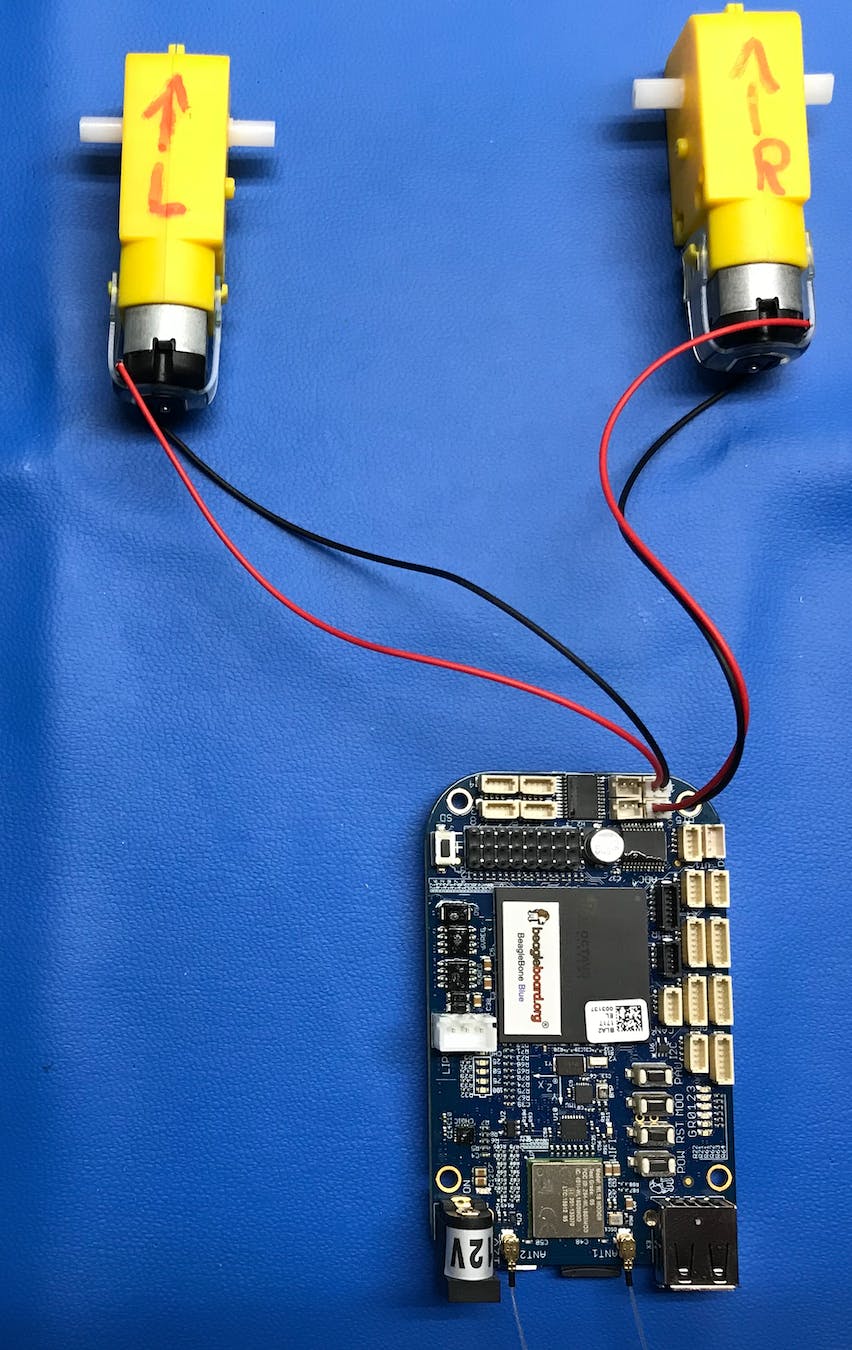
直流電機驅動器 1 連接到左側電機,驅動器 2 連接到右側電機。
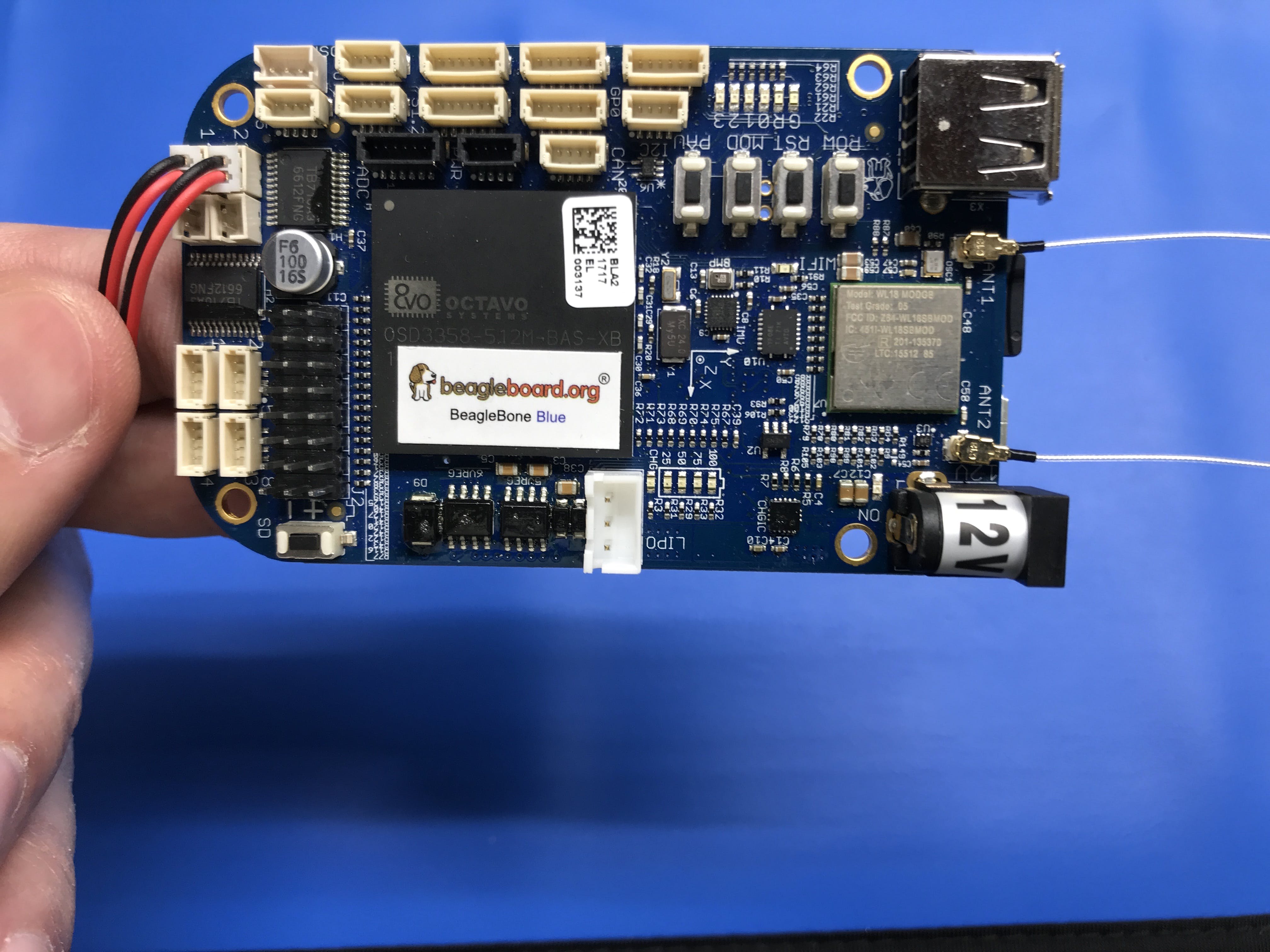
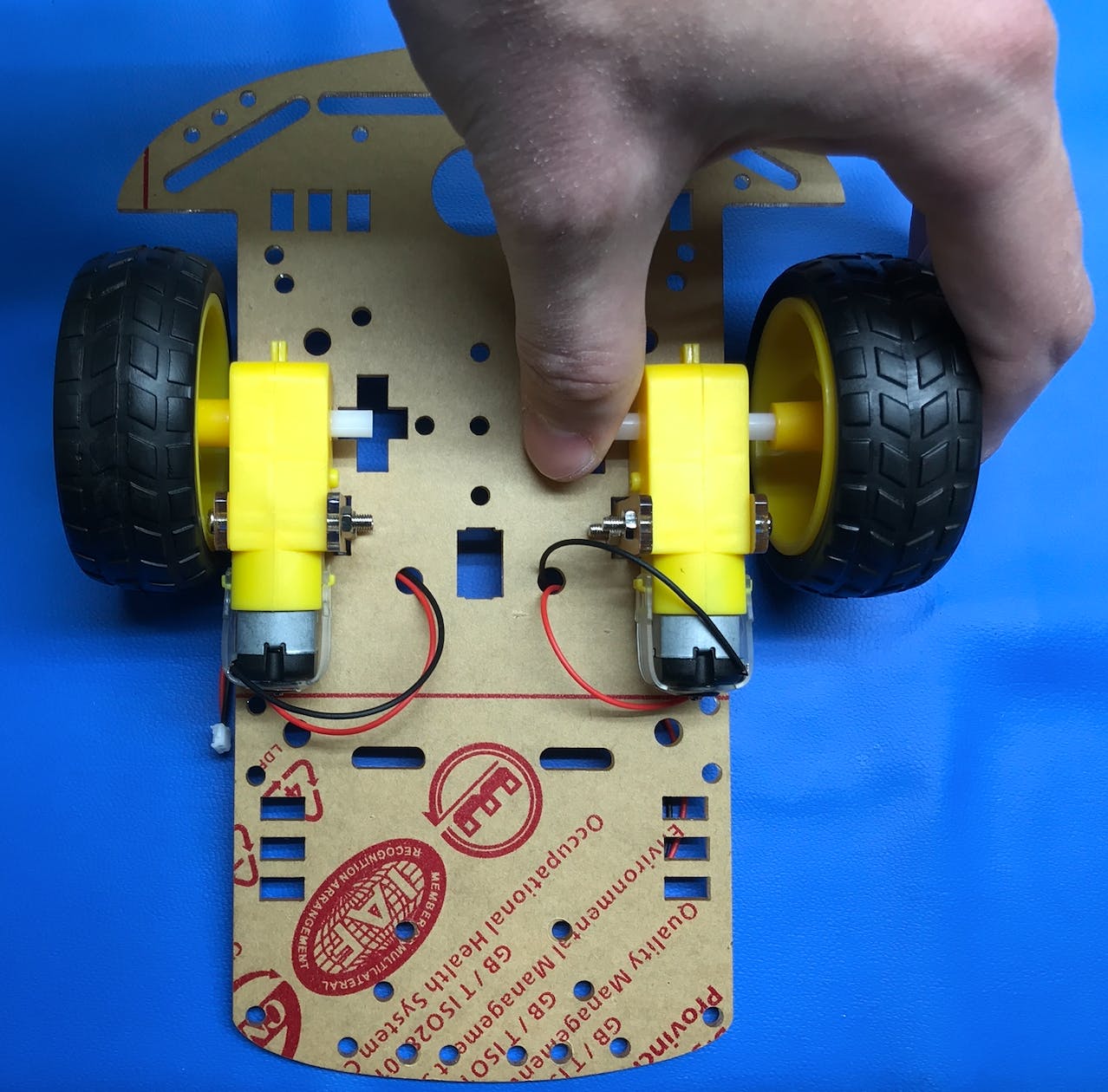
現在,將電線連接到電機,但還沒有焊接。如果車輪以錯誤的方向旋轉,您可能需要反轉電纜以恢復極性。現在,只需確保電線和電機之間的物理連接良好。
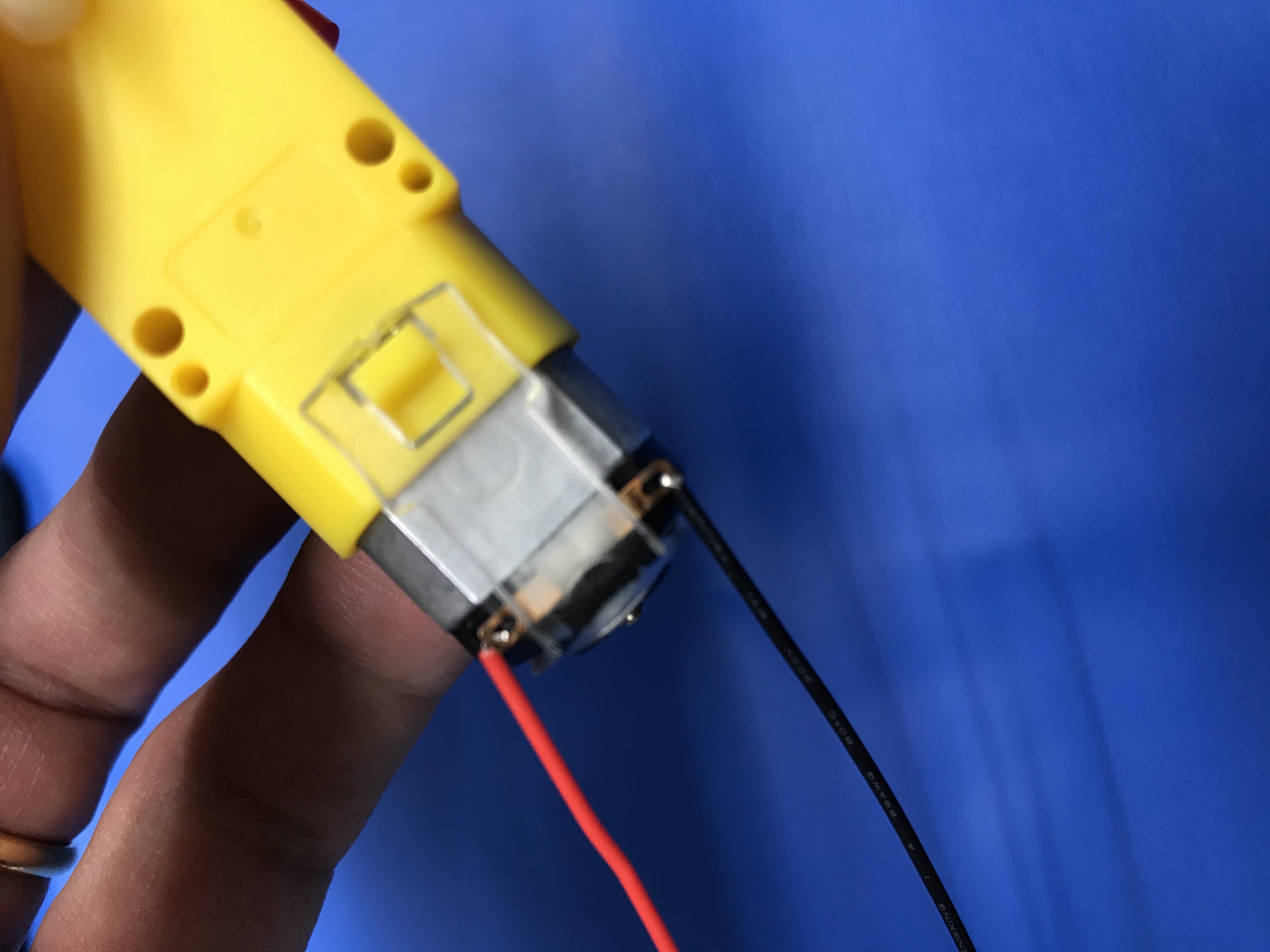
將您的電機標記為左側(連接到驅動器 1)和右側(連接到驅動器 2)。定義連接電線的相對端的正向方向,如下圖所示:
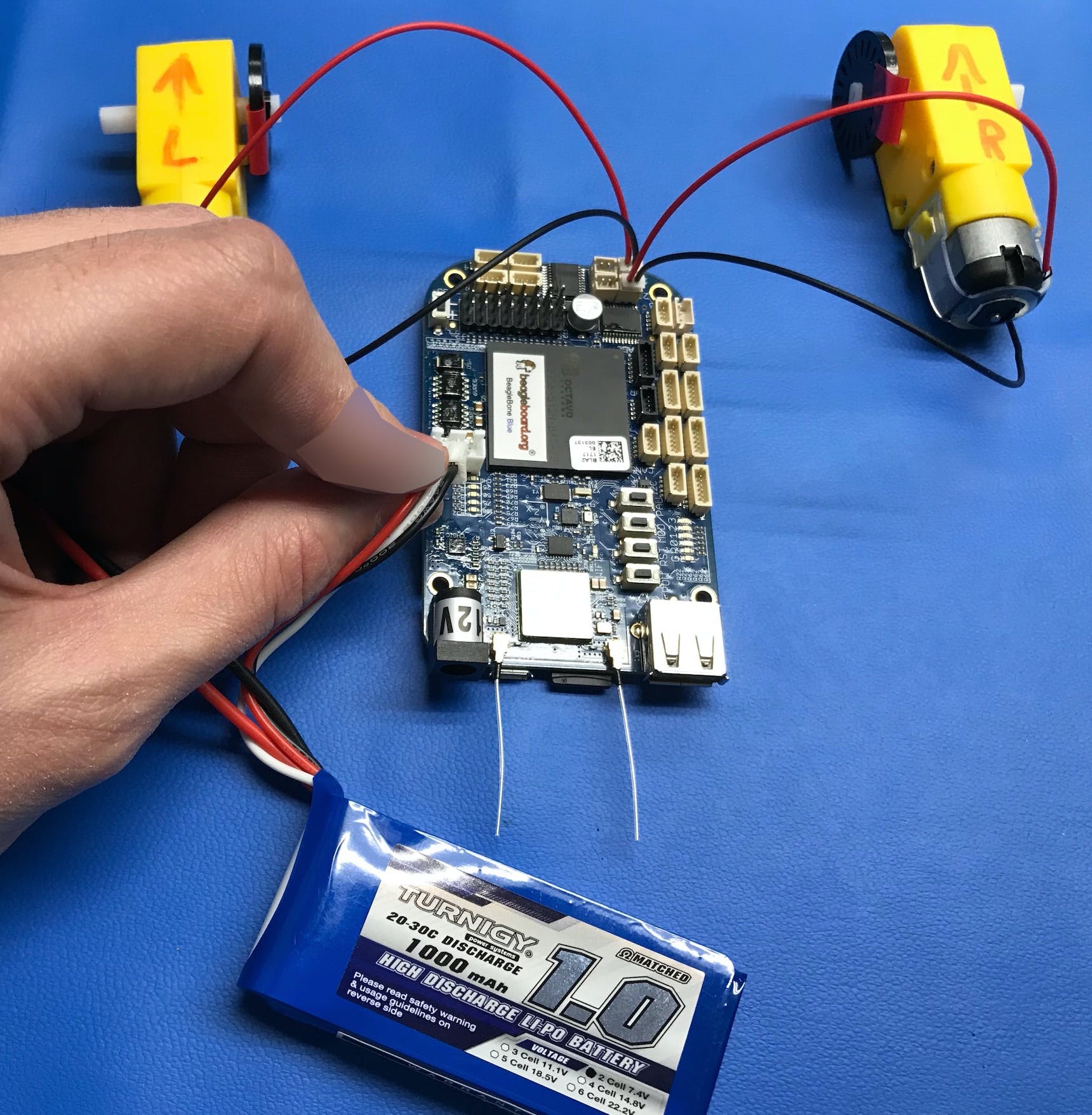
現在連接電池,打開你的 Beaglebone。
等待 Beaglebone 完全啟動,然后將其連接到您的 WiFi 網絡。如果這是您第一次使用 BluPants 映像啟動它,則需要手動將其連接到 WiFi。為了正確設置您的 WiFi 網絡,請參閱官方 BeagleBoard 文檔:啟用網絡連接,然后設置WiFi 連接。
檢查電機極性/方向
將 Beaglebone 連接到 WiFi 后,打開瀏覽器并訪問http://blupants.org 。確保您用來瀏覽的計算機也連接到您連接 Beaglebone 的同一個 WiFi 網絡。
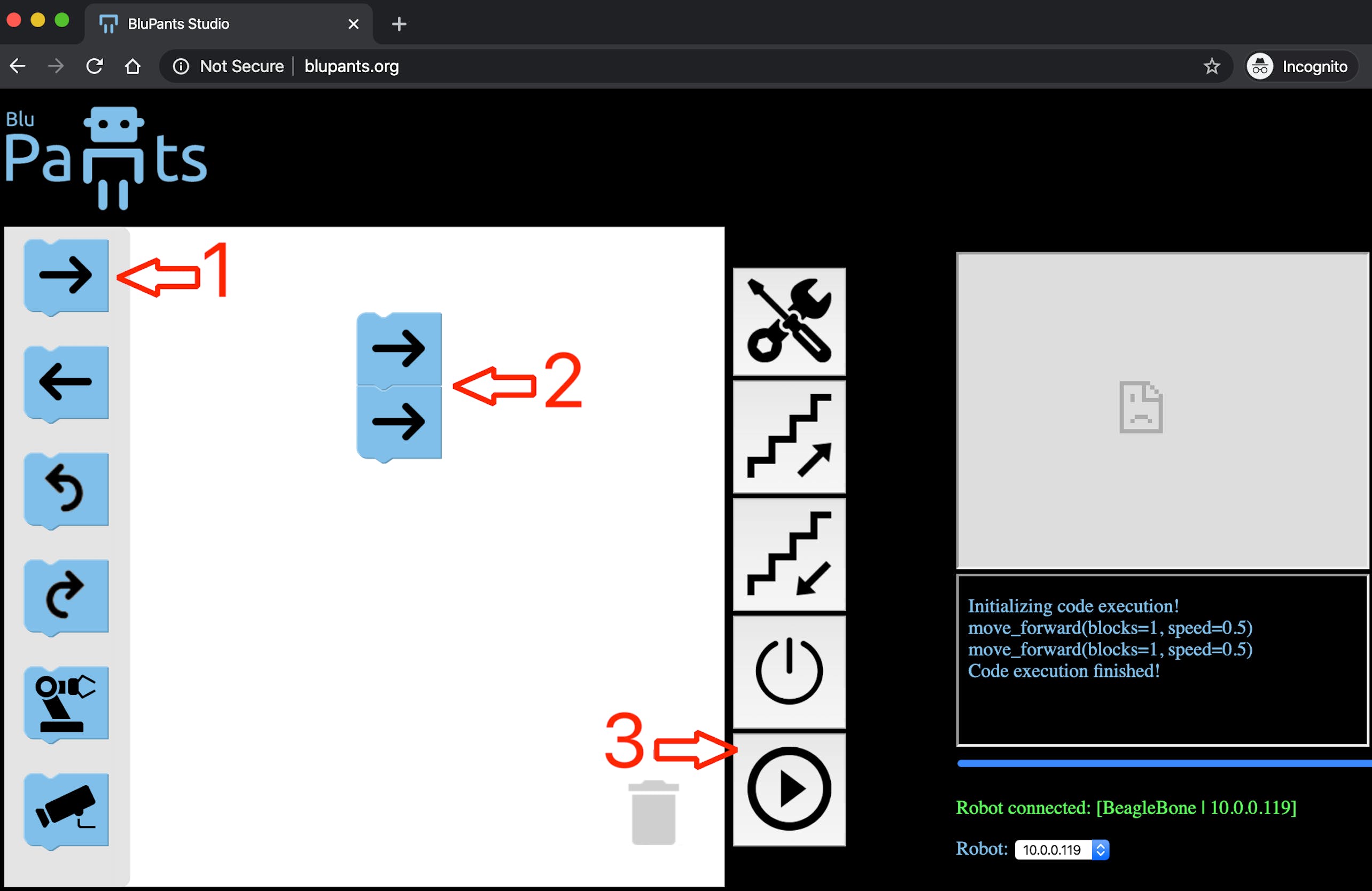
在“機器人”下拉菜單(右下角)中,選擇您的 Beaglebone 的 WiFi IP 地址,然后單擊“播放”:
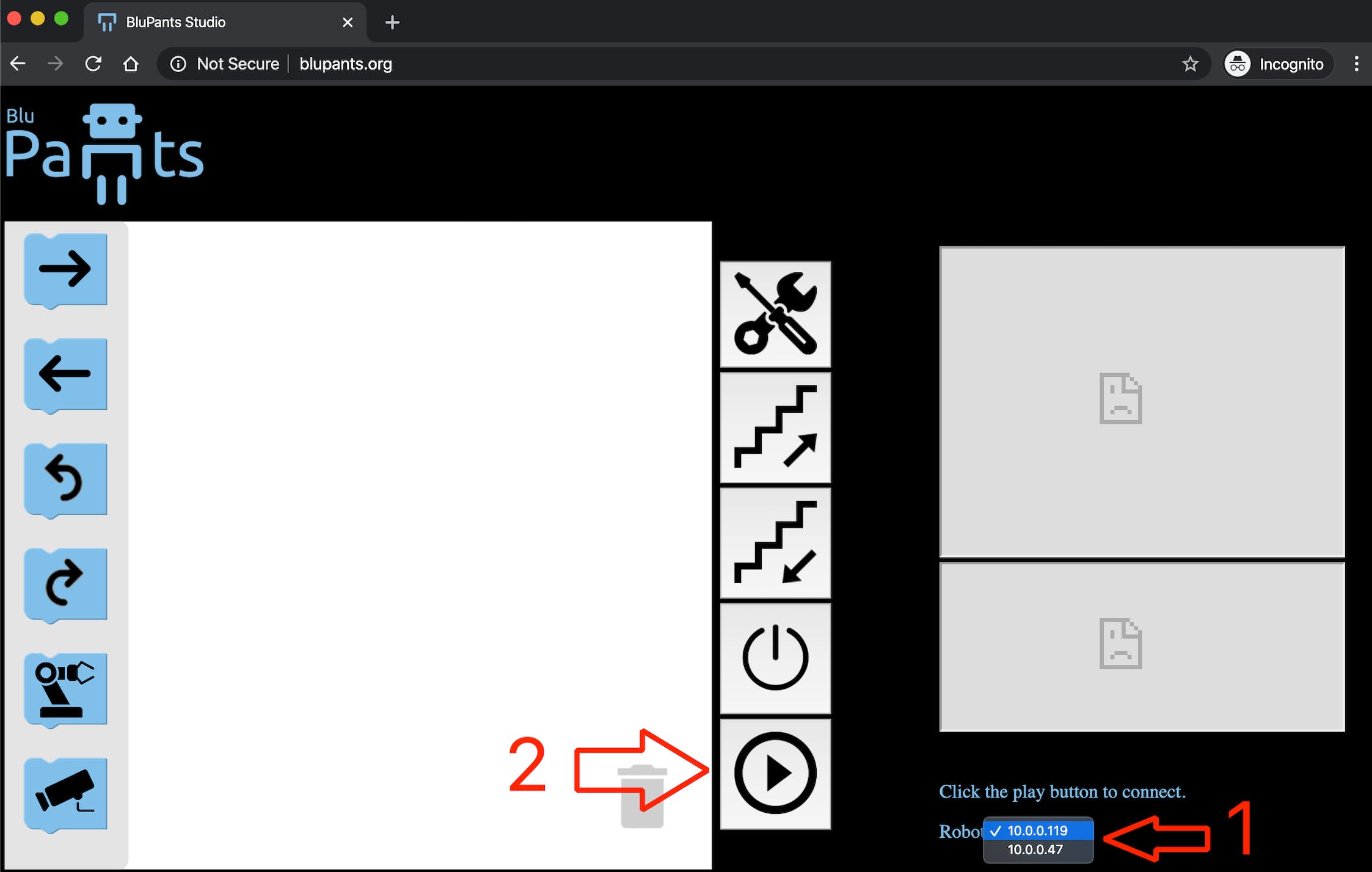
在此示例中,Beaglebone WiFi 地址為“10.0.0.119”。如果您看不到任何 IP 地址,請嘗試重新加載頁面,或打開和關閉瀏覽器。如果仍然無法連接,請參閱“BluPants 連接故障排除”部分。
現在您已連接,拖放一兩個“向前移動”命令塊,然后單擊“播放”執行它。
觀察兩個電機,確保它們向“前進”方向移動。
確認連接良好后,您可以繼續焊接。
現在我們已經焊接好了電機和電線,并且已經定義了左、右電機和前進方向,讓我們開始組裝我們的機器人吧!
組裝機器人
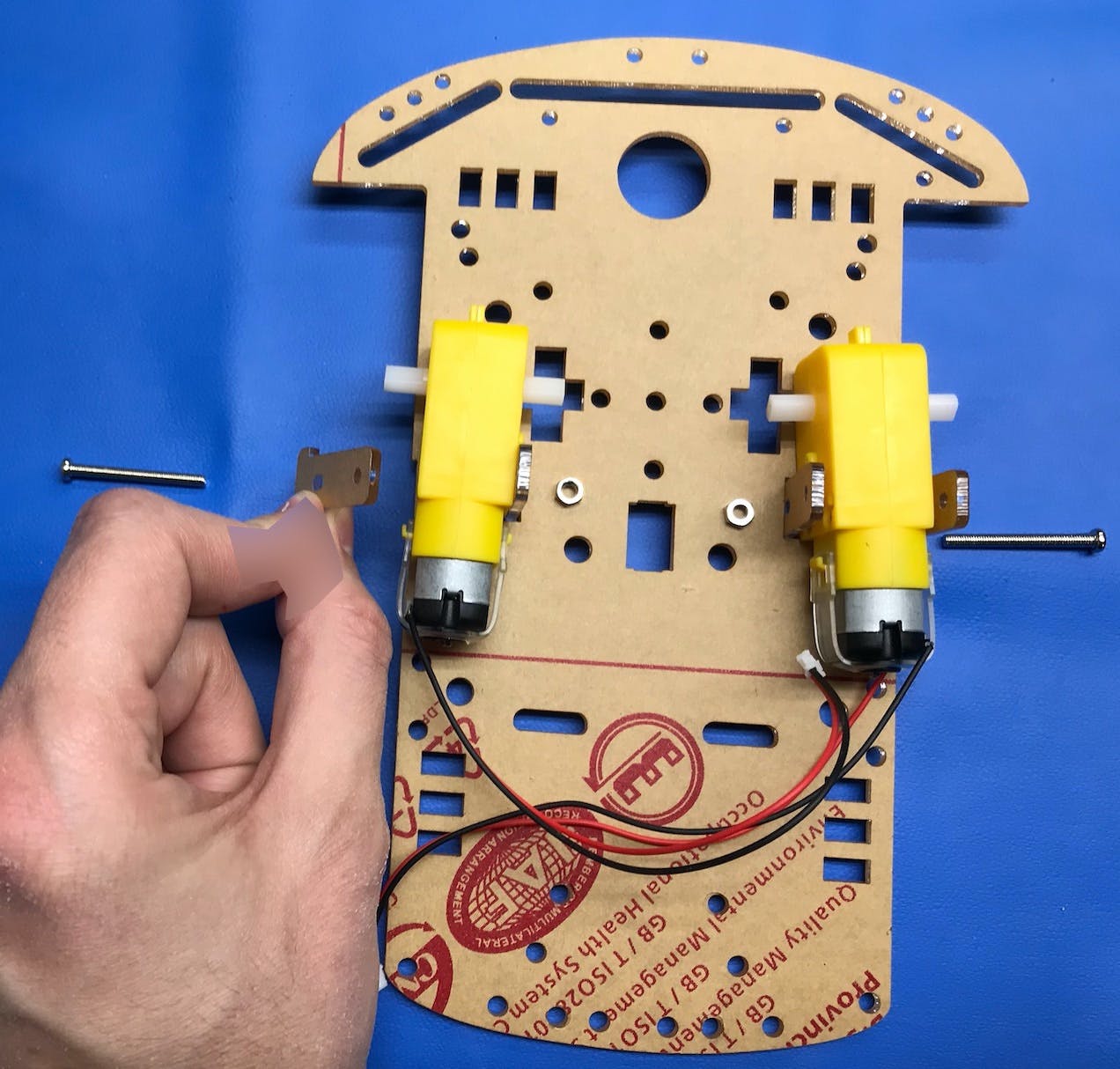
關閉 Beaglebone 并斷開電池。拿到底盤,把它放在電機的頂部,按照我們目前桌子上的設置:
將電機固定在底盤上并將其翻轉。請注意,字母“L”和“R”將不再可見,因為底盤連接到電機的表面與我們寫字母的表面相同。
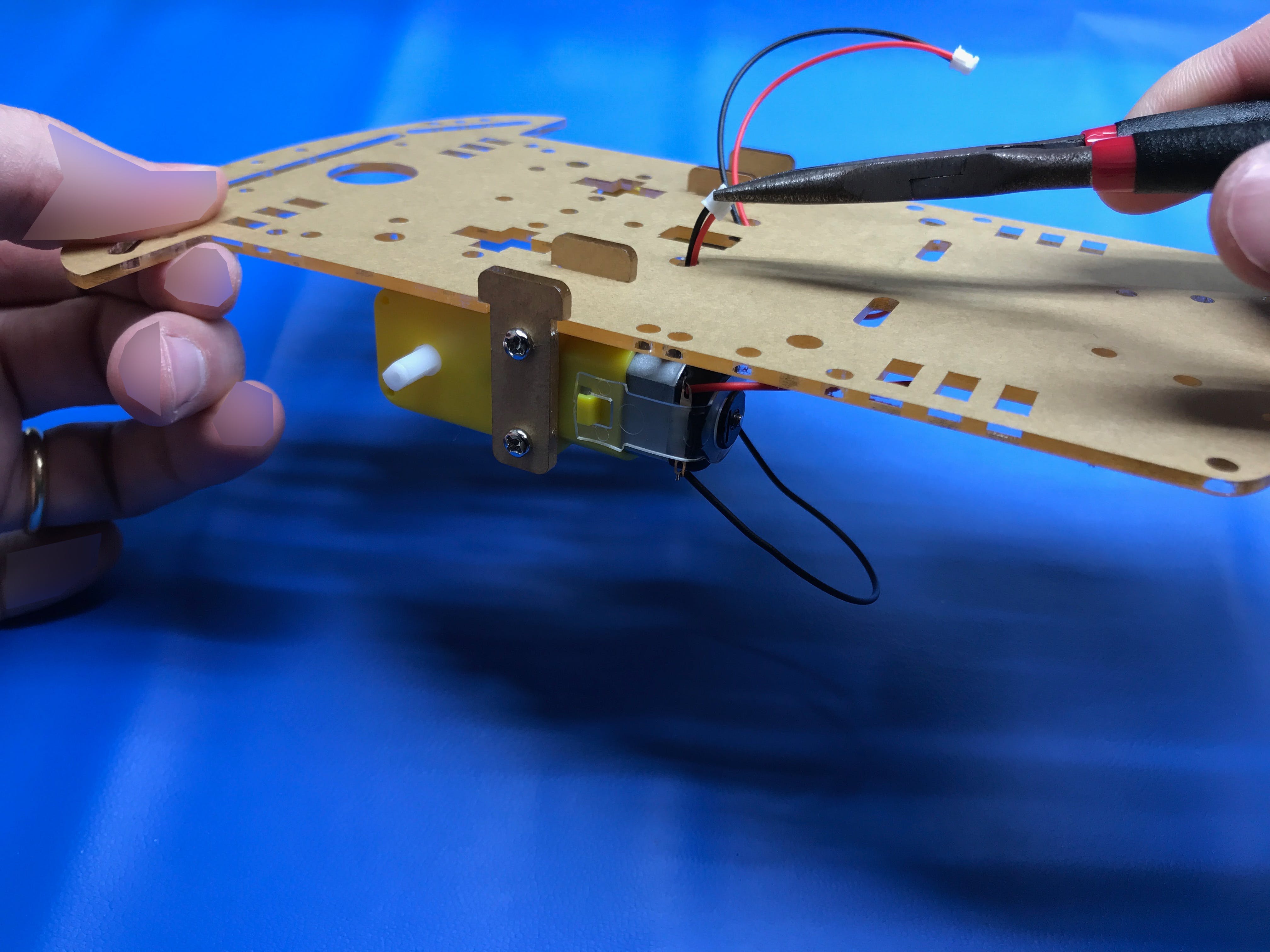
翻轉底盤后,將另外兩個外部緊固件靠近電機并使用螺栓固定。螺栓應該從外到內。螺母應從機箱內部安裝。
將 JST 連接器帶到機箱頂部。
連接兩個電機輪并將旋轉輪安裝到底盤背面。
準備好底盤后,將 JST 連接器連接到電機驅動器(左側 JST 連接到驅動器 1,右側 JST 連接到電機驅動器號 2)。然后連接電池,打開 Beaglebone。
。由于電池和 Begaleboard 在轉彎過程中移動,機器人向右過度轉向。因此,在嘗試對其進行調整之前,請確保您的機器人穩定且沒有任何松散的連接部件。
對于調整和自定義,您需要在 Beaglebone 上編輯文件“/root/blupants.json”。每次單擊播放按鈕并執行代碼時,都會重新加載blupants.json文件。
例如,您可能希望機器人在執行“move_forward()”命令時移動得更遠。為此,您需要做的就是增加默認值
"block_length": 0.5,
類似于
"block_length": 0.9,
或者,您可能希望機器人通過對占空比應用一個因子來減慢速度(默認情況下,它使用一半的直流電)。將當前值從
"duty": 0.5,
類似于
"duty": 0.3,
您還可以補償物理問題,例如一個電機運行速度比另一個電機快(這會阻止機器人直線移動)。
假設您希望電機 2(右側的電機)運行速度慢 20%。為此,您將 duty_ratio 的第二個值從 1.0 更改為 0.8。
原始設置:
"beagleboneblue":
{
"motor":
{
"duty_ratio": [1.0, 1.0, 1.0, 1.0],
}
}
右側電機運行速度慢 20% 的設置:
"beagleboneblue":
{
"motor":
{
"duty_ratio": [1.0, 0.8, 1.0, 1.0],
}
}
隨意編輯文件并測試您的代碼,直到您獲得所需的準確性。如果由于某種原因,您破壞了 json 文件并且機器人不再工作,只需從github下載原始副本。
wget https://raw.githubusercontent.com/blupants/blupants/master/src/python/blupants/blupants.json
恢復損壞的blupants.json文件后,您可能需要重新啟動服務。要重新啟動服務,請打開命令提示符,然后運行:
sudo service blupants restart
如果您需要任何進一步的幫助,請隨時在本文中添加任何評論。
BluPants 連接故障排除
如果您無法將瀏覽器連接到 Beaglebone,請確保您的 BluPants 服務正在運行。登錄到您的 Beaglebone(默認憑據是用戶:root ,密碼:temppwd )并打開命令提示符。然后運行命令:
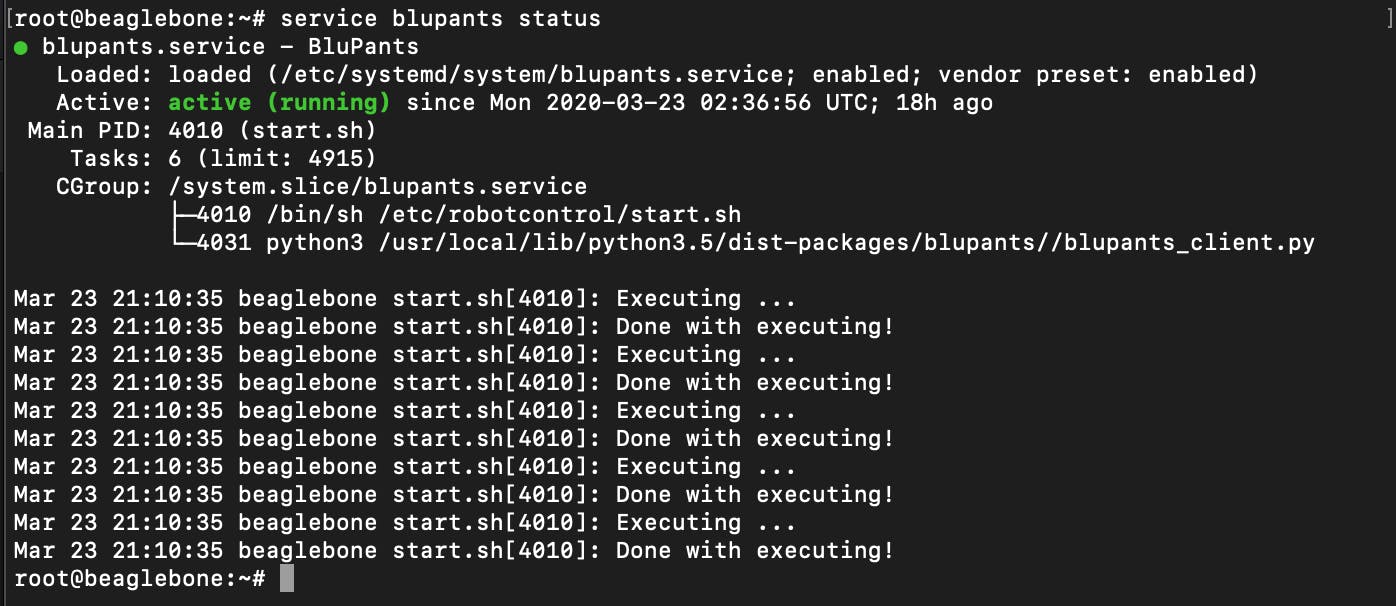
sudo service blupants status
預期的結果應該是這樣的:
如果需要重啟服務,可以嘗試:
sudo service blupants restart
并再次檢查狀態。確認服務正常運行后,在瀏覽器上訪問http://blupants.org并嘗試再次連接到 Beaglebone。
或者,您可以嘗試直接在 URL 上提供您的 Beaglebone WiFi IP 地址。為了手動獲取您的 WiFi IP 地址,請從您的 Beaglebone 命令 shell 運行以下命令:
ifconfig wlan0
你應該得到類似的東西:
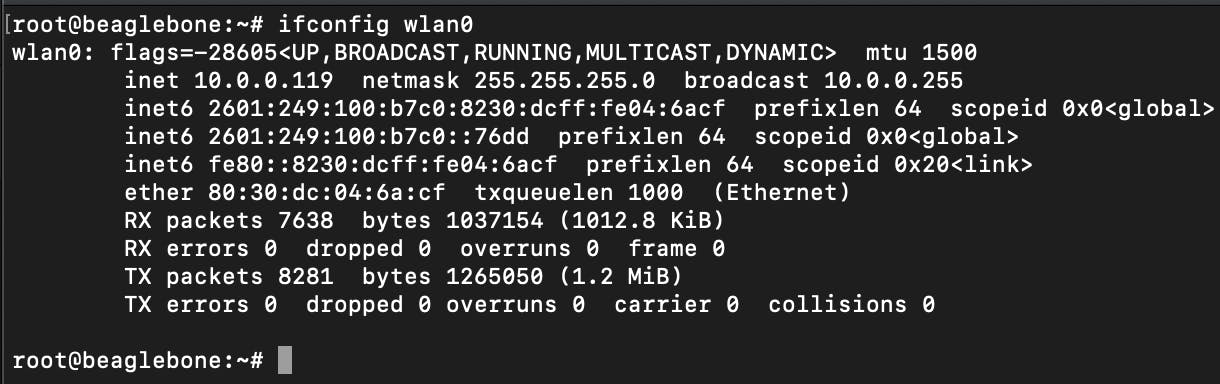
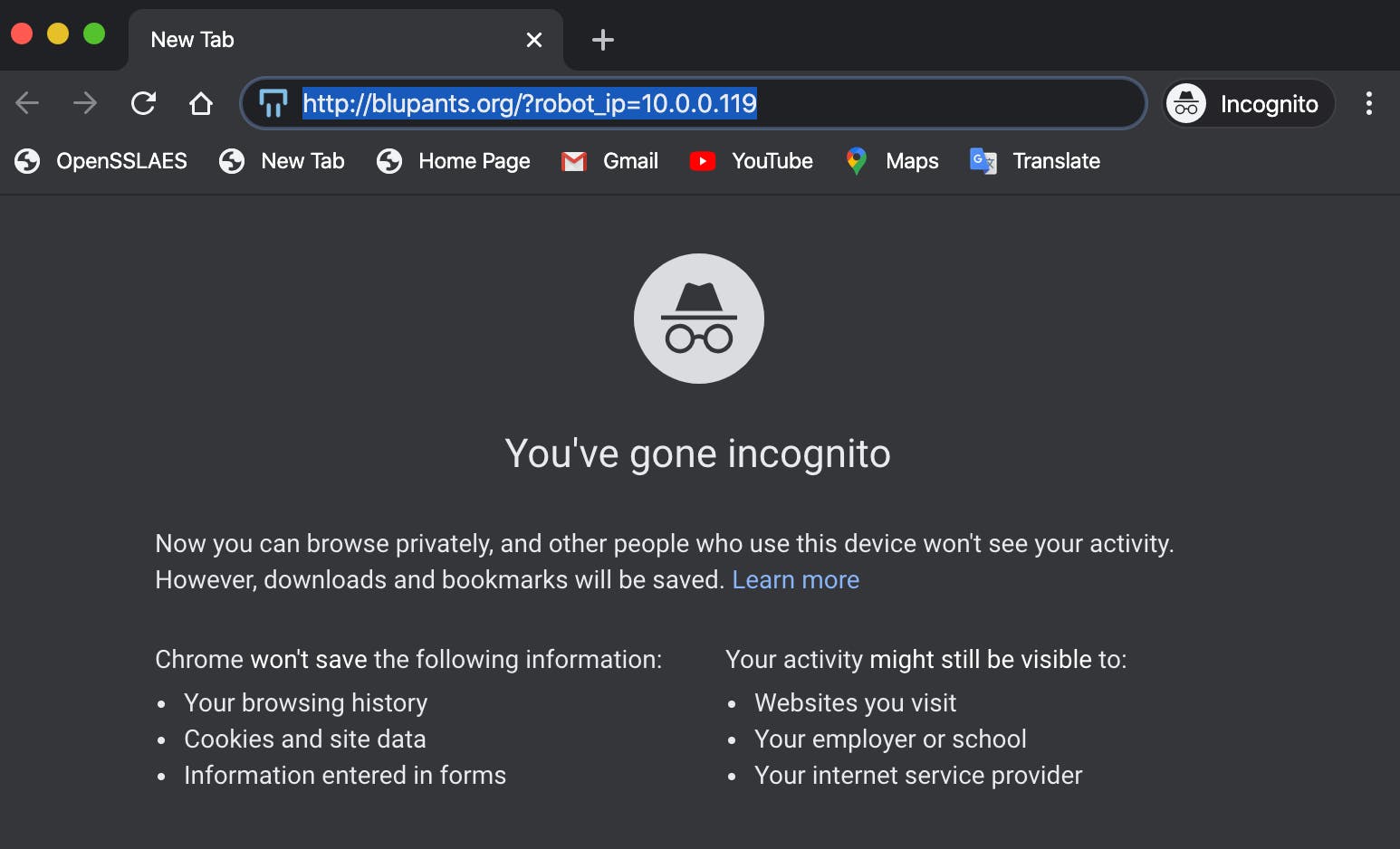
IP 地址在第三行 (inet) 上顯示為“10.0.0.119”。您的 IP 很可能會有所不同。現在我們知道了我們的 IP 地址,我們可以像這樣直接在瀏覽器 URL 上使用它:
http://blupants.org/?robot_ip=10.0.0.119
確保將“10.0.0.119”替換為您自己的 IP 地址并將其粘貼到瀏覽器地址欄中。打開頁面并單擊“播放”按鈕進行連接。
如果您需要任何進一步的幫助,請在本文中添加任何評論,我們將為您提供幫助。
下一步是什么?
請繼續關注更多教程,這樣您就可以擴展您的基本機器人。例如,我們有一個關于如何為您的機器人添加爪子的教程和另一個用于向 Beaglebone Blue 添加距離傳感器的教程。距離傳感器與我們今天創建的機器人完全兼容。隨意按照其他教程中的說明,對您的基本 MVP 機器人進行擴展。
將來,我們將討論諸如添加帶有平移和傾斜伺服系統的相機、添加抓手爪、文本到語音、使用 OpenCV 4 的計算機視覺等主題。所有這些內容都已原生包含在您剛剛閃現的 BluPants 圖像中今天到您的微型 SD 卡。
您可能想進一步探索它并自己嘗試新事物。如果您有這種感覺,請查看我們在本教程中標記為可選的所有部分,并嘗試自己構建更多內容。BluPants 是一個旨在讓您邊做邊學的平臺。
如果您想給我們留言,請隨時添加評論和/或直接與我們聯系。在Twitter 上關注我們以隨時關注所有新版本
下次見!
Robot4()
{
return Humans++;
}
謝謝注意
BluPants 圖像基于開源項目Beagleboard 。我們要感謝所有 Begaleboard 社區,感謝您支持的令人驚嘆的高質量開源硬件平臺。如果您想了解有關 Beagleboard 的更多信息,請訪問:https ://beagleboard.org 。
- 使用Raspberry Pi和BluPants進行編碼
- 使用AlphaBot2-Pi和BluPants進行編碼
- Beaglebone智能圣誕花環開源分享
- ChupaCarBrah:使用BeagleBone和Python進行汽車黑客攻擊
- BeagleBone Black的PCB板 0次下載
- BeagleBone Black eMMC 燒寫全記錄 ( 基于 AM335x SDK06)
- 無線WIFI OSD3358 beaglebone black 主板原理圖PCB手冊
- 如何進行SMS短信的PDU編碼詳細資料說明
- 如何使用多層非負局部Laplacian稀疏編碼進行圖像分類 4次下載
- 如何給BEAGLEBONE開發板加入圖形界面 22次下載
- beaglebone--Android開發教程(中文資料) 12次下載
- 如何使BEAGLEBONE基礎電器通知消息 10次下載
- 啟動 BeagleBone 項目前需要知道的 10 件事 24次下載
- BeagleBone-Camera-Expansion-RevA 0次下載
- BeagleBone Black快速入門教程工具和源代碼 26次下載
- 如何使用ASCII碼進行編碼 740次閱讀
- 如何利用生成式人工智能進行精確編碼 750次閱讀
- 增量編碼器和絕對值編碼器的區別 3034次閱讀
- 編碼器好壞怎么判斷,編碼器原理 1960次閱讀
- 如何為BeagleBone Black添加電容式觸控顯示模塊 2822次閱讀
- 操作BeagleBone Black的方法 3499次閱讀
- 如何使用單片機模擬PT2262進行編碼 7033次閱讀
- 電子編碼器怎么編碼_電子編碼器編碼失敗的原因 1.1w次閱讀
- 脈沖編碼器的原理_脈沖編碼器的故障分析 9502次閱讀
- 絕對式編碼器精度最高到好多_提高絕對式編碼器精度的途徑 1.1w次閱讀
- 信息分類編碼系統 四大關鍵點進行詳細介紹 5677次閱讀
- 編碼器正交編碼工作原理 3.2w次閱讀
- 什么是編碼器_編碼器工作原理是什么 5.1w次閱讀
- 基于FPGA的多進制BCH編碼 4794次閱讀
- 基于CAN總線的旋轉編碼器采集模塊設計 6765次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 2PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 3PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 4dsPIC33EDV64MC205電機控制開發板用戶指南
- 5.78MB | 8次下載 | 免費
- 5STC15系列常用寄存器匯總免費下載
- 1.60 MB | 7次下載 | 5 積分
- 6模擬電路仿真實現
- 2.94MB | 4次下載 | 免費
- 7PCB圖繪制實例操作
- 2.92MB | 2次下載 | 免費
- 8零死角玩轉STM32F103—指南者
- 26.78 MB | 1次下載 | 1 積分
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 452次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 141次下載 | 1 積分
- 3基于STM32單片機智能手環心率計步器體溫顯示設計
- 0.10 MB | 137次下載 | 免費
- 4A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 5PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 6如何正確測試電源的紋波
- 0.36 MB | 19次下載 | 免費
- 7PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 8Q/SQR E8-4-2024乘用車電子電器零部件及子系統EMC試驗方法及要求
- 1.97 MB | 8次下載 | 10 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論