 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
這個(gè)怎么運(yùn)作?
機(jī)器人可以在 2 種模式下工作。下面我將解釋我在 Matlab 中使用的一些最重要的函數(shù)。然而,要真正理解這種圖像處理是如何工作的,你必須看看機(jī)器人看到了什么。
值得一提的功能是:
- 快照- 從網(wǎng)絡(luò)攝像頭獲取圖像
- rgb2gray - 將圖像轉(zhuǎn)換為灰度
- bwareaopen - 從二進(jìn)制圖片中去除噪聲
- regionprops - 測(cè)量白點(diǎn)并找到它的位置
從最后一個(gè)函數(shù),Matlab 能夠找到磁帶的中心點(diǎn)(它的位置)。然后它會(huì)計(jì)算磁帶在 3 個(gè)可能的位置中的哪一個(gè)。剩下要做的就是使用fprintf函數(shù)將位置編號(hào)發(fā)送給 Arduino。然后 Arduino(取決于它收到的價(jià)值)決定接近哪個(gè)位置。
您可能已經(jīng)注意到 - 該視覺(jué)系統(tǒng)無(wú)法識(shí)別任何位置,只能識(shí)別預(yù)定義的三分之一。
串行通信技巧
當(dāng)我們?cè)?Arduino 上打開(kāi)串行通信時(shí),控制器將重置。您會(huì)注意到,當(dāng)您在 IDE 中打開(kāi)串行監(jiān)視器時(shí),它甚至?xí)刂谩?/font>為了解決這個(gè)問(wèn)題,我在 Arduoino 的 RESET 和 GND 引腳之間焊接了一個(gè) 10uF 電容器(+ 轉(zhuǎn)到 RESET)。詳情在這里。
使用 Arduino 的 Matlab 支持包
我沒(méi)有在這個(gè)項(xiàng)目中使用它,但我在另一個(gè)項(xiàng)目中使用過(guò),我認(rèn)為值得一提。要安裝軟件包,請(qǐng)轉(zhuǎn)到:附加組件 -> 獲取硬件支持包 -> 從 Internet 安裝 -> Arduino。
這個(gè)包有很多功能可以使用,你可以在這里找到列表。
借助這個(gè)軟件包,您可以使用 Matlab 在 Arduino 上編寫(xiě)整個(gè)程序,但對(duì)我來(lái)說(shuō)似乎并不方便。我用它的目的是當(dāng)我不得不觀(guān)察和分析一些電壓信號(hào)并且沒(méi)有示波器來(lái)做的時(shí)候。相反,我使用了這個(gè)包和一個(gè)簡(jiǎn)單的代碼,你可以在代碼部分找到。結(jié)果很好:
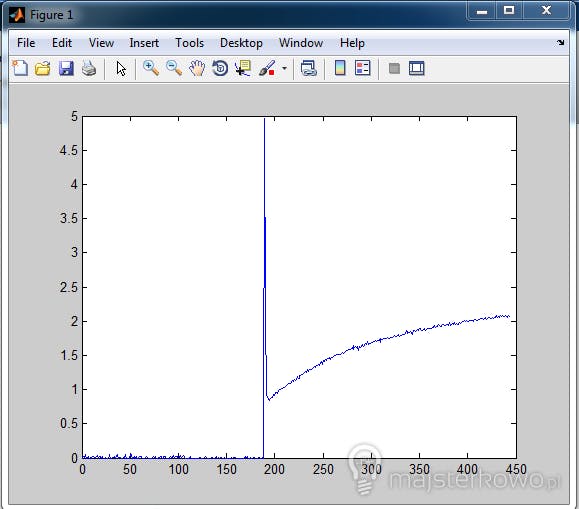
?
- 使用Arm link軟件控制Arduino機(jī)械臂
- 基于Arduino UNO的可編程機(jī)械臂 1次下載
- 基于Arduino UNO的微型機(jī)械臂 0次下載
- 工業(yè)機(jī)械臂
- 完整的機(jī)械設(shè)計(jì)與MATLAB應(yīng)用課件下載 0次下載
- 基于YOLOv3等的機(jī)械臂藥盒智能抓取方法 61次下載
- 基于FuzzyP的多臂機(jī)器人機(jī)械臂控制系統(tǒng) 13次下載
- 機(jī)械臂手冊(cè)使用說(shuō)明 17次下載
- 使用SimMechanics實(shí)現(xiàn)六自由度的機(jī)械臂仿真研究 1次下載
- 機(jī)械臂電路設(shè)計(jì)開(kāi)源合集,電機(jī)工程師們的杰作 47次下載
- 如何使用深度強(qiáng)化學(xué)習(xí)進(jìn)行機(jī)械臂視覺(jué)抓取控制的優(yōu)化方法概述 22次下載
- 取件機(jī)械臂定位精度優(yōu)化 3次下載
- 機(jī)械臂關(guān)節(jié)驅(qū)動(dòng)組件 7次下載
- 采用圖像處理技術(shù)的機(jī)械臂定位裝置 23次下載
- 雙機(jī)械臂運(yùn)動(dòng)軌跡優(yōu)化方法 10次下載
- 使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站 89次閱讀
- 深度解析!RK3568 加持機(jī)械臂是如何實(shí)現(xiàn)顏色識(shí)別與抓取的? 67次閱讀
- 基于六維力傳感器的機(jī)械臂自動(dòng)裝配應(yīng)用 834次閱讀
- 【開(kāi)源獲獎(jiǎng)案例】四軸機(jī)械臂控制系統(tǒng) 1319次閱讀
- 使用Arduino機(jī)器人繪制一個(gè)MATLAB Logo 920次閱讀
- 基于深度強(qiáng)化學(xué)習(xí)的視覺(jué)反饋機(jī)械臂抓取系統(tǒng) 2473次閱讀
- 基于Arduino的多功能機(jī)械臂設(shè)計(jì)方案 4710次閱讀
- dfrobotArduino開(kāi)發(fā)實(shí)戰(zhàn)-遙控機(jī)械臂套裝簡(jiǎn)介 2531次閱讀
- dfrobotLG-NS機(jī)械手夾持器介紹 2050次閱讀
- MATLAB機(jī)械臂的兩種路徑規(guī)劃 9167次閱讀
- 為什么最好的機(jī)械臂是7個(gè)自由度而不是6個(gè)自由度 2.6w次閱讀
- 工業(yè)機(jī)器人和機(jī)械手臂有什么區(qū)別 7817次閱讀
- 全球首款輕量級(jí)機(jī)械臂已經(jīng)出現(xiàn)了! 7535次閱讀
- 工業(yè)機(jī)器人常用材料分析:機(jī)械臂材料與常用傳感器 2.6w次閱讀
- 基于MicroZed的五軸自動(dòng)化機(jī)械臂Dexter 3443次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開(kāi)發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書(shū))
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德?tīng)栔?/a>
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論