 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
大家好,您是否正在尋找可以在沒有互聯網的情況下使用 WiFi 控制的機器人?如果是這樣,請按照我們將要討論的使用NodeMCU esp8266制作wifi 控制機器人的程序。您可以通過點擊給定的按鈕來控制機器人的方向。為了控制車輪,我們使用了L298N 電機驅動模塊。您還可以在我們的網站上查看完整的項目并提供詳細說明。
它是如何工作的?
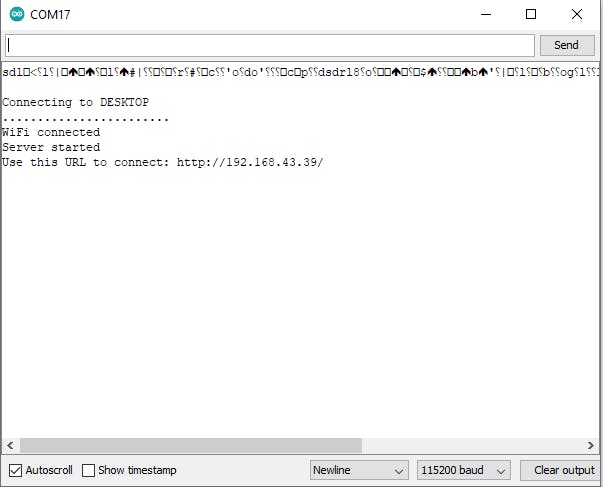
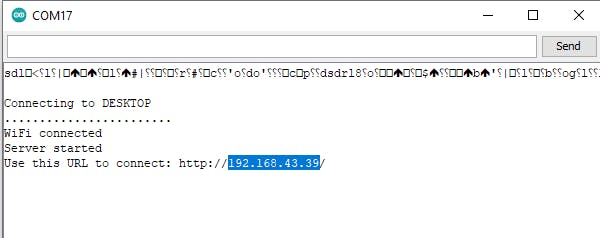
您必須在給定代碼中寫入您的網絡(移動熱點)SSID和密碼,以便 NodeMCU 可以連接到它。NodeMCU 將生成一個 IP 地址,您可以在串行監視器屏幕上看到該地址。記下此 IP 地址并將其寫在您可以在下圖中看到的框中。
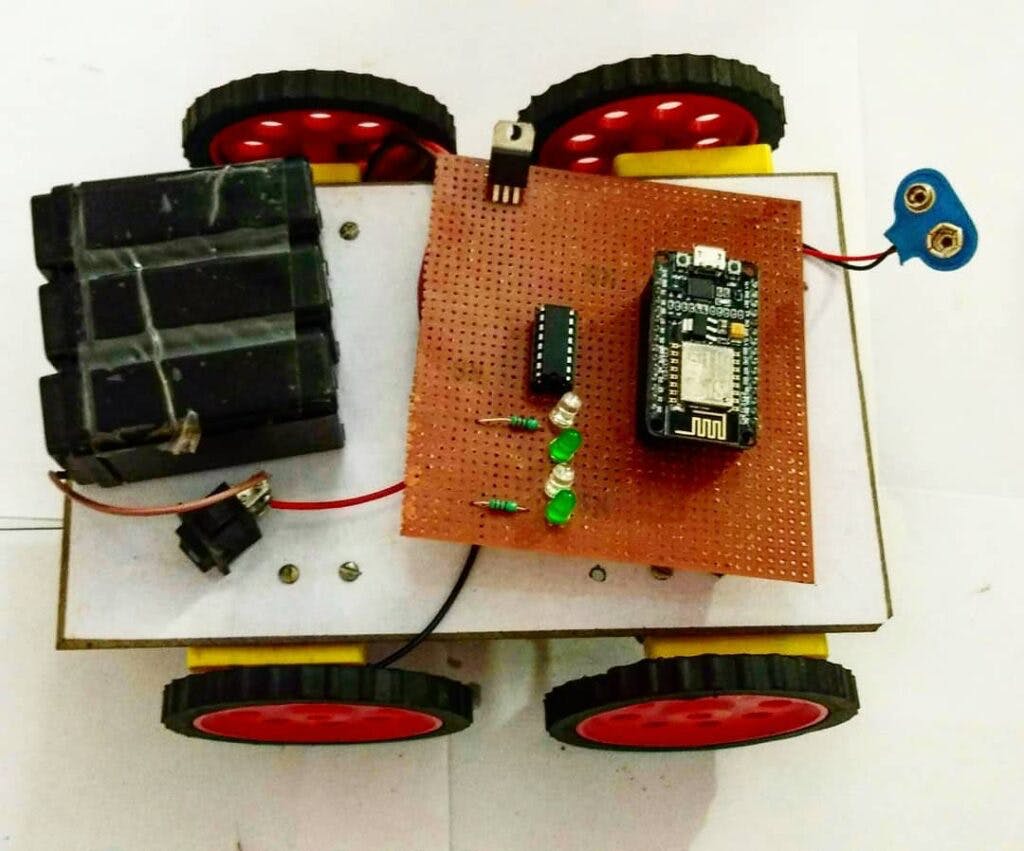
機器人將根據您點擊的按鈕移動。它可以向前、向后、向左和向右移動。只需打開您的機器人并享受它。

這就是我們的機器人的樣子。
所需組件
WiFi控制機器人電路圖
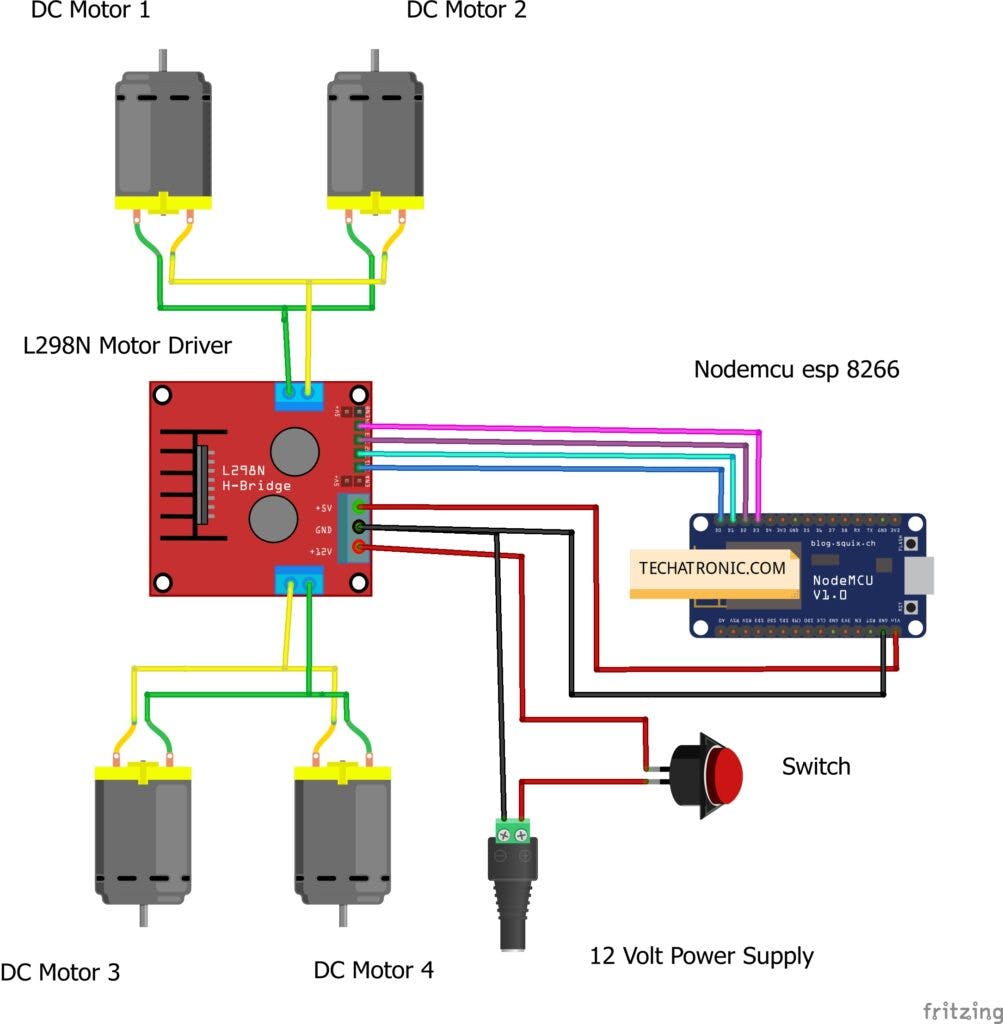
將兩臺直流電機的正極和負極線組合在一側,并將電線連接到 L298N 電機驅動器的一側輸出。對第二對直流電機重復相同的操作,并將電線連接到 L298N 電機驅動器的另一個輸出。將 L298N 模塊的 IN-1 引腳與 NodeMCU 的 D-0 引腳連接起來,將 L298N 模塊的 IN-2 引腳與 NodeMCU 的 D-1 引腳連接起來。將 L298N 模塊的 IN-3 引腳與 NodeMCU 的 D-2 引腳連接,將 L298N 模塊的 IN-4 引腳與 NodeMCU 的 D-3 引腳連接。將 L298N 模塊的 5 伏引腳與 NodeMCU 的 VIN 引腳連接起來,將 L298N 模塊的 GND 引腳與 NodeMCU 的 GND 引腳連接起來。將 12 伏電源的正極線連接到開關,然后連接到 L298N 模塊的 12 伏引腳。
WiFi控制機器人代碼
注意:請將下面給出的代碼上傳到 NodeMCU。
//TECHATRONIC.COM
// ESP8266 LIBRARY
// https://github.com/ekstrand/ESP8266wifi
#include
String i;
WiFiServer server(80);
void setup()
{
i = "";
Serial.begin(9600);
pinMode(16, OUTPUT); // GPIO pin16=D0 of NodeMCU 12E or in place of '16' you can write'D0' directly || -->Connected to motordriver
pinMode(5, OUTPUT); // GPIO pin5= D1 of NodeMCU 12E or in place of '16' you can write 'D0' directly || -->Connected to motordriver
pinMode(4, OUTPUT); // GPIO pin4= D2 of NodeMCU 12E or in place of '16' you can write 'D0' directly || -->Connected to motordriver
pinMode(0, OUTPUT); // GPIO pin0= D3 of NodeMCU 12E or in place of '16' you can write 'D0' directly || -->Connected to motordriver
WiFi.disconnect();
delay(2000);
Serial.println("Connecting to WIFI");
WiFi.begin("DESKTOP","asdfghjkl"); //Enter WIFI Name & Password
while ((!(WiFi.status() == WL_CONNECTED))){
delay(300);
Serial.print("..");
}Serial.println("I am Connected");
Serial.println("My Local IP is : ");
Serial.print((WiFi.localIP()));
server.begin();
}
void loop()
{
WiFiClient client = server.available();
if (!client) { return; }
while(!client.available()){ delay(1); }
i = (client.readStringUntil('\r'));
i.remove(0, 5);
i.remove(i.length()-9,9);
if (i == "forward") {
digitalWrite(16,HIGH);
digitalWrite(5,LOW);
digitalWrite(4,HIGH);
digitalWrite(0,LOW);
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("");
client.println("");
client.println("
); client.println("forward"); client.println(""); client.stop(); delay(1); } if (i == "reverse") { digitalWrite(16,LOW); digitalWrite(5,HIGH); digitalWrite(4,LOW); digitalWrite(0,HIGH); client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println(""); client.println(""); client.println(""); client.println("reverse"); client.println(""); client.stop(); delay(1); } if (i == "right") { digitalWrite(16,LOW); digitalWrite(5,LOW); digitalWrite(4,HIGH); digitalWrite(0,LOW); client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println(""); client.println(""); client.println(""); client.println("right"); client.println(""); client.stop(); delay(1); } if (i == "left") { digitalWrite(16,HIGH); digitalWrite(5,LOW); digitalWrite(4,LOW); digitalWrite(0,LOW); client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println(""); client.println(""); client.println(""); client.println("left"); client.println(""); client.stop(); delay(1); } if (i == "stop") { digitalWrite(16,LOW); digitalWrite(5,LOW); digitalWrite(4,LOW); digitalWrite(0,LOW); client.println("HTTP/1.1 200 OK"); client.println("Content-Type: text/html"); client.println(""); client.println(""); client.println(""); client.println("stop"); client.println(""); client.stop(); delay(1); } }
請查看我們編寫的關于 Arduino和Raspberry Pi的熱門教程。
學習愉快!
- 手勢控制機器人開源項目
- 藍牙控制機器人開源
- 兒童助理機器人開源項目
- Arduino機器人開源項目
- 消毒機器人開源項目
- 平衡segway機器人開源項目
- 手勢控制機器人開源分享
- WIFI控制的分段機器人
- 帶有NodeMCU的WiFi控制機器人
- 鍵盤控制的WiFi機器人/間諜機器人
- 藍牙控制機器人開源分享
- WiFi控制機器人開源分享
- 機器人開源項目
- 自主機器人開源項目
- 基于DSP和PC的農業機器人控制系統 18次下載
- 如何使用PLC控制機器人 1883次閱讀
- 機器人技術中常用的路徑規劃算法的開源庫 1188次閱讀
- 機器人項目涉及的技術 1068次閱讀
- 利用STM32實現自平衡機器人功能項目 1081次閱讀
- 基于PIC單片機和PSC控制器實現機器人控制系統的設計 4087次閱讀
- 機器人控制系統分類_機器人控制系統有哪些 2.6w次閱讀
- 工業機器人技術應用 5343次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.2w次閱讀
- 關于工業機器人智能控制的四種控制方式 6479次閱讀
- 協作機器人的起源_為什么需要協作機器人 8322次閱讀
- 移動機器人控制系統設計與仿真 3641次閱讀
- 機器人控制系統的基本單元與機器人控制系統的特點分析 1.1w次閱讀
- 機器人的運動控制的介紹和如何將機器人的運動控制分成4種任務 1w次閱讀
- 基于PLC的機器人伺服運動控制系統設計詳解 1.6w次閱讀
- 機器人自動化工程項目方案設計包括的6個步驟解析 1.3w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 2PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 3PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 4dsPIC33EDV64MC205電機控制開發板用戶指南
- 5.78MB | 8次下載 | 免費
- 5STC15系列常用寄存器匯總免費下載
- 1.60 MB | 7次下載 | 5 積分
- 6模擬電路仿真實現
- 2.94MB | 4次下載 | 免費
- 7PCB圖繪制實例操作
- 2.92MB | 2次下載 | 免費
- 8零死角玩轉STM32F103—指南者
- 26.78 MB | 1次下載 | 1 積分
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 452次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 141次下載 | 1 積分
- 3基于STM32單片機智能手環心率計步器體溫顯示設計
- 0.10 MB | 137次下載 | 免費
- 4A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 5PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 6如何正確測試電源的紋波
- 0.36 MB | 19次下載 | 免費
- 7PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 8Q/SQR E8-4-2024乘用車電子電器零部件及子系統EMC試驗方法及要求
- 1.97 MB | 8次下載 | 10 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論