在無(wú)人駕駛汽車(chē)上,激光雷達(dá)和攝像頭相對(duì)于是汽車(chē)的“眼睛”,他們倆各有不同的優(yōu)缺點(diǎn),激光雷達(dá)是獲取高精度地圖非常重要的傳感器,那么無(wú)人駕駛汽車(chē)到底用激光雷達(dá)還是用攝像頭?或者還有其它的解決方案呢?
2016-12-07 10:42:20 11160
11160 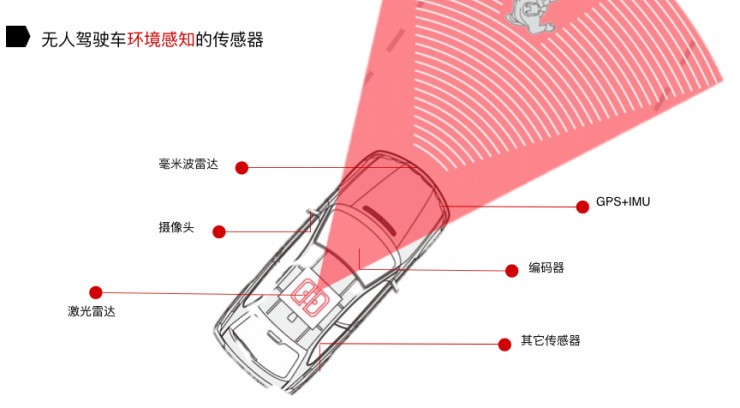
1. ? 無(wú)人駕駛汽車(chē)的政策法規(guī)尚未完善 目前,無(wú)人駕駛汽車(chē)普及應(yīng)用的最大挑戰(zhàn)是大眾對(duì)其接受度較低,對(duì)其安全性、可靠性的信任度較低。但因國(guó)家對(duì)無(wú)人駕駛汽車(chē)的政策法規(guī)尚未完善,無(wú)人駕駛汽車(chē)還不能在公開(kāi)道路上行駛
2021-05-21 14:51:0612659 
攝像頭,激光測(cè)距儀,夜視儀,車(chē)載信息技術(shù),車(chē)載電腦,車(chē)輛控制技術(shù),預(yù)防碰撞系統(tǒng),車(chē)道保持系統(tǒng),立體視覺(jué)系統(tǒng),自動(dòng)泊車(chē)系統(tǒng),紅外照相機(jī)設(shè)備,電磁控制系統(tǒng),人機(jī)交互系統(tǒng),車(chē)聯(lián)網(wǎng)平臺(tái),智能交通等;無(wú)人駕駛
2017-02-22 19:57:21
`可定制 的wifi 可視倒車(chē)攝像頭WiFi可視倒車(chē)攝像頭接受客戶個(gè)性化定制,我們不做成品,只為客戶定制方案! 全球首家支持cvbs/av輸入的WiFi可視倒車(chē)攝像頭! 特點(diǎn):1 支持CVBS輸入
2015-08-09 11:59:12
。然而,如今先進(jìn)的駕駛輔助系統(tǒng)(ADAS)超越了車(chē)鏡的反射,通過(guò)攝像頭為駕駛員提供了基于駕駛座位的擴(kuò)展視角。攝像監(jiān)控系統(tǒng)(CMS)也被稱(chēng)為電子鏡或智能鏡,旨在以攝像頭和顯示屏的形式提供車(chē)鏡體驗(yàn)。想象一下
2022-11-10 06:22:00
,但車(chē)鏡仍是汽車(chē)上的重要設(shè)備,可幫助駕駛員掉頭或變道。然而,如今先進(jìn)的駕駛輔助系統(tǒng)(ADAS)超越了車(chē)鏡的反射,通過(guò)攝像頭為駕駛員提供了基于駕駛座位的擴(kuò)展視角。攝像監(jiān)控系統(tǒng)(CMS)也被稱(chēng)為電子鏡或智能
2019-03-05 06:45:08
近來(lái)無(wú)人駕駛車(chē)輛引起了廣泛熱議。 業(yè)界正在努力開(kāi)發(fā)這種技術(shù),將其作為提高安全性和節(jié)省費(fèi)用的方法。 這已不再是遙不可及的構(gòu)想,寶馬、奔馳和特斯拉等公司均已發(fā)布或即將發(fā)布可使汽車(chē)自動(dòng)駕駛的車(chē)輛系統(tǒng)。一些
2017-04-28 17:11:01
在自動(dòng)駕駛領(lǐng)域,目前有兩大技術(shù)路徑:一是以特斯拉等汽車(chē)廠商為代表的“輔助駕駛”升級(jí)路線,其探測(cè)技術(shù)基礎(chǔ)是攝像頭(機(jī)器視覺(jué))、毫米波雷達(dá)、超聲雷達(dá);二是以谷歌等互聯(lián)網(wǎng)公司為代表的“無(wú)人駕駛”路線;其
2017-09-28 16:50:52
無(wú)人駕駛分級(jí)無(wú)人駕駛汽車(chē)關(guān)鍵技術(shù)
2021-01-21 07:13:47
汽車(chē)也稱(chēng)作智能汽車(chē),即環(huán)境感知、路徑規(guī)劃、行為決策、自主控制能力的智能車(chē)輛平臺(tái)。其關(guān)鍵技術(shù)主要有兩個(gè)方面:車(chē)輛定位和車(chē)輛控制技術(shù)。無(wú)人駕駛技術(shù)實(shí)現(xiàn)手段是在車(chē)上安裝攝像頭、雷達(dá)傳感器和激光探測(cè)器等先進(jìn)
2014-11-11 11:21:30
在通往無(wú)人駕駛的神奇之路上,英特爾勇往直前。在1939年世界博覽會(huì)上,通用汽車(chē)的未來(lái)世界展覽預(yù)示,由嵌入技術(shù)的道路控制汽車(chē)的新時(shí)代終將到來(lái)。早期的無(wú)人駕駛汽車(chē)概念更關(guān)注支持車(chē)輛的基礎(chǔ)設(shè)施,而非車(chē)輛本身。
2020-05-13 06:07:36
使用無(wú)人駕駛汽車(chē)更接近現(xiàn)實(shí)”。試想一輛谷歌自動(dòng)駕駛貨車(chē)只能開(kāi)到我的街道,而一輛谷歌無(wú)人機(jī)可飛到我的房子完成旅程,按門(mén)鈴,并放下一堆最近訂購(gòu)的開(kāi)學(xué)課本在臺(tái)階上(而不在我的腳邊),相當(dāng)了不起。無(wú)人機(jī)比自動(dòng)駕駛
2018-11-01 09:00:20
、車(chē)載網(wǎng)絡(luò)、LED照明、動(dòng)力總成、車(chē)身和主動(dòng)安全方案。觀看此視頻,了解安森美半導(dǎo)體如何幫助汽車(chē)設(shè)計(jì)工程師和制造商解決創(chuàng)建連接的和無(wú)人駕駛汽車(chē)面臨的獨(dú)特挑戰(zhàn)。
2018-10-19 09:08:15
無(wú)人駕駛汽車(chē)開(kāi)發(fā)的關(guān)鍵技術(shù)主要有兩個(gè)方面:車(chē)輛定位和車(chē)輛控制技術(shù)。這兩方面相輔相成共同構(gòu)成無(wú)人駕駛汽車(chē)的基礎(chǔ)。
2020-03-18 09:02:01
無(wú)人駕駛汽車(chē)的工作原理是什么?無(wú)人駕駛汽車(chē)包括哪些技術(shù)?
2021-06-28 07:19:59
目前無(wú)人駕駛出現(xiàn)了兩種技術(shù)方向,一種是超級(jí)大腦類(lèi)型,即從有人駕駛一步到無(wú)人駕駛的研究方向。另一種則是通過(guò)半自動(dòng)駕駛逐步實(shí)現(xiàn)無(wú)人駕駛技術(shù)的研究路線。ADI公司汽車(chē)電子事業(yè)部大中華區(qū)市場(chǎng)總監(jiān)許智斌先生
2017-02-22 16:07:56
當(dāng)然也一樣有高低級(jí)之分。普遍的駕駛員信息系統(tǒng)包括后視攝像頭、全景視野顯示、盲點(diǎn)和車(chē)道偏離報(bào)警等。這些ADAS技術(shù)為時(shí)刻掌控汽車(chē)操作的駕駛員提供了信息幫助。同時(shí),一些半自動(dòng)系統(tǒng)也在車(chē)輛行駛過(guò)程中為駕駛
2018-08-30 15:39:10
自動(dòng)駕駛還需要較長(zhǎng)的路要走ADAS、自動(dòng)駕駛、無(wú)人駕駛、智能汽車(chē)等詞語(yǔ)風(fēng)靡科技圈,如果哪個(gè)智能硬件團(tuán)隊(duì)或科技公司無(wú)法與這些關(guān)鍵詞建立關(guān)聯(lián),頗有被世界遺棄之感。但是,如果客觀的去分析,真正意義上的自動(dòng)駕駛尚有較長(zhǎng)的路要走。
2020-05-07 06:59:06
` 本帖最后由 anyhero 于 2016-6-7 20:50 編輯
各位技術(shù)大咖,我和朋友在上海,去年九三閱兵和朋友一起成立了無(wú)人駕駛研究小組(非營(yíng)利性),希望可以做出一個(gè)借口全部打開(kāi)的可控
2016-06-06 21:17:26
。希望本文對(duì)無(wú)人駕駛從業(yè)者以及愛(ài)好者選擇硬件的時(shí)候有幫助。無(wú)人駕駛: 復(fù)雜系統(tǒng)無(wú)人駕駛技術(shù)是多個(gè)技術(shù)的集成,如圖1所示,一個(gè)無(wú)人駕駛系統(tǒng)包含了多個(gè)傳感器,包括長(zhǎng)距雷達(dá)、激光雷達(dá)、短距雷達(dá)、車(chē)載攝像頭...
2021-09-09 08:16:33
。基于測(cè)量能力和環(huán)境適應(yīng)性,預(yù)計(jì)激光雷達(dá)和車(chē)載攝像頭會(huì)持續(xù)傳感器平臺(tái)霸主的地位,并不斷與多種傳感器融合,發(fā)展出多種組合版本。完備的無(wú)人駕駛系統(tǒng)應(yīng)該如下圖所示,各個(gè)傳感器之間借助各自所長(zhǎng)相互融合、功能互補(bǔ)、互為
2017-09-30 16:50:53
無(wú)人駕駛汽車(chē)在中國(guó)這個(gè)汽車(chē)高增長(zhǎng)的國(guó)家是否能行得通呢?中國(guó)從2000年起到2010年按照十年計(jì)算,汽車(chē)的產(chǎn)量從200多萬(wàn)輛上升到1000萬(wàn)輛連續(xù)十年的時(shí)間超速增長(zhǎng)了,有關(guān)業(yè)界人士表示,這是從有汽車(chē)
2015-01-09 10:45:11
盤(pán)點(diǎn)了充滿創(chuàng)意的未來(lái)十大汽車(chē)技術(shù),包括車(chē)外氣囊,感知網(wǎng)絡(luò)和自動(dòng)駕駛等。1.外車(chē)身安全氣囊以前的汽車(chē)安全氣囊都是在車(chē)內(nèi)。TRW汽車(chē)安全技術(shù)公司正在研發(fā)一種外部氣囊,裝入汽車(chē)側(cè)面。采用攝像頭和雷達(dá)構(gòu)探測(cè)何時(shí)
2015-10-29 16:21:35
ADAS系統(tǒng)無(wú)人駕駛的眼睛毫米波雷達(dá)汽車(chē)已經(jīng)進(jìn)入無(wú)人駕駛探索階段,可以主動(dòng)防護(hù)汽車(chē)駕駛安全的高級(jí)駕駛輔助系統(tǒng)(以下簡(jiǎn)稱(chēng):ADAS)技術(shù)也正在逐步的完善。ADAS簡(jiǎn)單來(lái)說(shuō)就是讓汽車(chē)有感知系統(tǒng),可感受
2023-04-18 11:42:23
`1、前言汽車(chē)后視安全輔助系統(tǒng)能夠在復(fù)雜的車(chē)輛操控過(guò)程中為駕駛員提供輔助和補(bǔ)充,并在未來(lái)最終實(shí)現(xiàn)無(wú)人駕駛。提供的功能包括自適應(yīng)巡航控制、盲點(diǎn)監(jiān)測(cè)、車(chē)道偏離警告、夜視、車(chē)道保持輔助和碰撞警告系統(tǒng),具有
2018-07-26 16:20:47
一個(gè)改裝過(guò)的無(wú)線路由器,通過(guò)刷機(jī),將路由器中加載網(wǎng)絡(luò)攝像頭驅(qū)動(dòng),這樣就可以將視頻發(fā)布出去了,當(dāng)然你的電腦必須有WIFI功能。建議新手直接購(gòu)買(mǎi)成品,因?yàn)橛行┠K需要修改硬件電路,至于在哪購(gòu)買(mǎi),請(qǐng)自行淘寶
2013-04-14 23:36:10
想問(wèn)一下PaddlePi-K210開(kāi)發(fā)板除了支持ov2640 ov5640攝像頭外,還支持哪些攝像頭作為外設(shè)?能否支持紅外攝像頭?謝謝!
2023-09-14 07:13:32
為了使駕駛安全避免事故,高級(jí)駕駛員輔助系統(tǒng) (ADAS)正成為現(xiàn)代汽車(chē)的標(biāo)準(zhǔn)配置。攝像頭是高級(jí)駕駛員輔助系統(tǒng) (ADAS)的重要組成部分,可提供駕駛員以前無(wú)法查看的盲點(diǎn)視圖、交通標(biāo)志識(shí)別、行人檢測(cè)
2022-11-03 08:24:55
了解到一些USB攝像頭的規(guī)格以及應(yīng)用。市面常見(jiàn)的為列:從VGA-720P-1080P-5M/2K-8M/4K-16M規(guī)格都有。下面我將粗略的羅列一些應(yīng)用: **1:電腦外掛攝像頭**: 2020年
2021-09-30 09:13:47
請(qǐng)教大神,我有一個(gè)u***攝像頭(也可買(mǎi)直接視頻輸出的那種攝像頭),有線連接也想過(guò),想把它改成可以實(shí)時(shí)監(jiān)控水下魚(yú)情的無(wú)線攝像頭(有線的挑手機(jī)型號(hào),很多手機(jī)不能用。)攝像頭通過(guò)u***連線連接水面的有
2018-01-31 23:26:08
:“為了滿足無(wú)人駕駛汽車(chē)的自動(dòng)化和安全性方面的需求,一些應(yīng)用程序不僅需要知道車(chē)子當(dāng)前正處于哪條車(chē)道上,還需要知道車(chē)子在車(chē)道的哪個(gè)位置上,并且在車(chē)子行駛的過(guò)程中進(jìn)行實(shí)時(shí)定位。”現(xiàn)在,全球定位系統(tǒng)主要通過(guò)衛(wèi)星來(lái)計(jì)算
2017-10-16 11:04:26
車(chē)上周?chē)?b class="flag-6" style="color: red">攝像頭和距離傳感器,感知其它車(chē)輛和障礙,并識(shí)別出車(chē)行道邊緣線,在一些情況下實(shí)現(xiàn)無(wú)人自主駕駛,如倒庫(kù),停車(chē)等。在高速公路上實(shí)現(xiàn)輔助駕駛,以降低事故發(fā)生率。在項(xiàng)目過(guò)程中,我們將先使用模型小車(chē)來(lái)進(jìn)行測(cè)試
2015-09-10 11:08:15
,可支持高達(dá) 200 MHz 的頻率。如果速度更高,則需要 LVDS 接口來(lái)實(shí)現(xiàn)信號(hào)完整性。機(jī)器視覺(jué)攝像頭的典型系統(tǒng)架構(gòu)為:1 離線處理功能的攝像頭 在機(jī)器視覺(jué)系統(tǒng)的上述配置中,包含獨(dú)立的攝像頭,它
2019-07-19 04:30:00
電動(dòng)汽車(chē)公司法拉第未來(lái)(Faraday Future)計(jì)劃今年晚些時(shí)候在加州測(cè)試其自動(dòng)駕駛原型車(chē),已獲加州車(chē)管局批準(zhǔn)。特斯拉無(wú)疑是所有廠家中走的最遠(yuǎn)的一個(gè),發(fā)布的半無(wú)人駕駛ModelS已經(jīng)進(jìn)入商用,并且
2016-06-24 14:28:03
增加的可靠性以及比駕駛員更快的反應(yīng)時(shí)間,無(wú)人駕駛系統(tǒng)能夠減少碰撞的數(shù)量。ADAS功能包括車(chē)輛前端、側(cè)方和后方的攝像頭和雷達(dá)傳感器,從而為車(chē)輛提供額外的“眼睛”和“耳朵”來(lái)“感受”周?chē)沫h(huán)境。由傳感器采集
2018-09-11 14:39:35
工智能技術(shù)可相當(dāng)于“司機(jī)”駕駛技術(shù)。因此,支持無(wú)人駕駛汽車(chē)的陣營(yíng)獲得了一大勝利。 同樣是在今年二月,奧巴馬總統(tǒng)今年的聯(lián)邦預(yù)算草案表示,美國(guó)聯(lián)邦***將在未來(lái)10年投入39億美元推動(dòng)無(wú)人駕駛汽車(chē)技術(shù)的發(fā)展
2016-06-13 14:55:19
、5個(gè)毫米波雷達(dá)、13個(gè)高感知攝像頭以及1套亞米級(jí)高精定位單元。相關(guān)個(gè)股:萬(wàn)集科技、均勝電子、德賽西威、華陽(yáng)集團(tuán)、中科創(chuàng)達(dá);熱點(diǎn)二:銀行邏輯概述:上半年商業(yè)銀行累計(jì)實(shí)現(xiàn)凈利潤(rùn)1.1萬(wàn)億元,同比增長(zhǎng)11.1%(一季度為同比增長(zhǎng)2.4%);不良貸款率1.76%,較上季末下降0.05個(gè)百分點(diǎn)。半年度商...
2021-08-31 06:06:50
雖然真正的無(wú)人駕駛汽車(chē)進(jìn)入生活還需要時(shí)日,但作為汽車(chē)駕駛主動(dòng)防護(hù)的高級(jí)輔助系統(tǒng)(簡(jiǎn)稱(chēng)ADAS)正在逐漸成熟和普及。ADAS主要是利用安裝在車(chē)上的各式各樣的傳感器,在行駛過(guò)程中隨時(shí)感知周?chē)沫h(huán)境,目前
2019-09-16 10:36:36
由廣東九聯(lián)科技股份有限公司進(jìn)行開(kāi)發(fā)生產(chǎn)的九聯(lián)半球機(jī)攝像頭和槍機(jī)攝像頭適配OpenHarmony 3.1 Release小型系統(tǒng),近期通過(guò)OpenAtom OpenHarmony(以下簡(jiǎn)稱(chēng)
2022-10-18 18:29:25
。希望本文對(duì)無(wú)人駕駛從業(yè)者以及愛(ài)好者選擇硬件的時(shí)候有幫助。無(wú)人駕駛: 復(fù)雜系統(tǒng)無(wú)人駕駛技術(shù)是多個(gè)技術(shù)的集成,如圖1所示,一個(gè)無(wú)人駕駛系統(tǒng)包含了多個(gè)傳感器,包括長(zhǎng)距雷達(dá)、激光雷達(dá)、短距雷達(dá)、車(chē)載攝像頭...
2021-09-09 07:37:47
車(chē)身安裝的10多個(gè)攝像頭進(jìn)行數(shù)據(jù)采集與傳輸,第二輛車(chē)則對(duì)這些數(shù)據(jù)進(jìn)行計(jì)算,然后通過(guò)計(jì)算結(jié)果做出對(duì)不同駕駛場(chǎng)景的控制判斷。這些駕駛場(chǎng)景分別包括學(xué)校區(qū)域、交通信號(hào)燈區(qū)域、高速行駛區(qū)域以及不受控制的十字路口
2018-03-19 11:50:24
。 日程安排 論壇首日 上午 全球及亞太地區(qū)智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)政策及未來(lái)發(fā)展趨勢(shì) 下午 智能駕駛輔助系統(tǒng)(ADAS)開(kāi)發(fā)、認(rèn)證和檢測(cè)及關(guān)鍵零部件技術(shù) 論壇次日 上午 智能網(wǎng)聯(lián)汽車(chē)及無(wú)人駕駛關(guān)鍵零部件技術(shù)及解決方案 下午 智能網(wǎng)聯(lián)汽車(chē)基礎(chǔ)支撐技術(shù)以及通信、平臺(tái)技術(shù)和信息安全
2016-10-27 15:53:48
速度測(cè)定可能看起來(lái)很極端,但對(duì)于支持復(fù) 雜的雙向車(chē)道行駛是必要的,在這種路況中,相向行駛的車(chē)輛的相對(duì)速度超過(guò)200公里/小時(shí)。激光雷達(dá)可以彌補(bǔ)攝像頭和一般雷達(dá)的不足,是具有認(rèn)知能力的全自動(dòng)駕駛車(chē)輛
2020-06-16 18:53:55
交付定制汽車(chē)。 內(nèi)部可以提供自主駕駛的一級(jí)到五級(jí)的不同設(shè)置。在五級(jí)版本中,有一個(gè)面對(duì)面的座位布局,在中央?yún)^(qū)域有一張桌子。 最后要說(shuō)的是,模塊化無(wú)人駕駛汽車(chē)Edit還沒(méi)知道什么時(shí)候推出,價(jià)格方面也不清楚。未來(lái)汽車(chē)生態(tài)社區(qū),關(guān)注微信公眾號(hào):sanchewang
2017-05-23 18:10:29
關(guān)于無(wú)人駕駛硬件平臺(tái)的解決方案,不看肯定后悔
2021-11-03 06:32:54
、半導(dǎo)體和互聯(lián)網(wǎng)公司完成。 博世在2015年提出的四個(gè)階段推廣無(wú)人駕駛技術(shù)的“十年計(jì)劃”,將從雷達(dá)、攝像頭、控制單元等核心配件入手,循序漸進(jìn)的實(shí)現(xiàn)無(wú)人駕駛,目前博世對(duì)無(wú)人駕駛的研發(fā)主要集中在駕駛輔助
2016-06-21 16:21:14
`1月5日-8日拉斯維加斯消費(fèi)電子展(CES)上,地平線機(jī)器人(以下簡(jiǎn)稱(chēng)“地平線”)將與英特爾聯(lián)合展示一款基于單目攝像頭和FPGA的ADAS產(chǎn)品原型系統(tǒng)。車(chē)輛檢測(cè)結(jié)果該原型由英特爾和地平線聯(lián)合開(kāi)發(fā)
2017-01-06 18:09:34
基于光電導(dǎo)航的無(wú)人駕駛智能車(chē)下個(gè)月學(xué)校舉行這個(gè)智能車(chē)比賽,比在相同路段跑的時(shí)間,看到這個(gè)題目,沒(méi)有任何思路。。望高手指教下,原理圖,設(shè)計(jì)思路。。都可以!!謝謝~
2013-04-10 10:19:23
如何實(shí)現(xiàn)無(wú)人駕駛硬件平臺(tái)的設(shè)計(jì)?
2021-11-02 09:29:23
如何構(gòu)建一輛無(wú)人駕駛車(chē)呢?
2021-09-30 07:37:34
現(xiàn)在汽車(chē)倒車(chē)刮擦事件很多,甚至撞到人或車(chē),現(xiàn)在攝像頭多為靜止的,想做一個(gè)可轉(zhuǎn)動(dòng)的攝像頭,就象人眼一樣幾個(gè)角度掃描,后來(lái)想到后視鏡電機(jī),用后視鏡電機(jī)組件接上攝像頭,按鈕放在駕駛室內(nèi),不知可否。
2017-07-30 14:08:47
開(kāi)發(fā)的全自動(dòng)駕駛交通工具都依賴(lài)激光探測(cè)和測(cè)距技術(shù)(激光雷達(dá))來(lái)感知世界并繪制地圖。這些地圖為無(wú)人駕駛汽車(chē)提供重要信息,利用其傳感系統(tǒng)和計(jì)算系統(tǒng)重點(diǎn)關(guān)注汽車(chē)、行人和自行車(chē)等障礙物的信息。然而,激光雷達(dá)
2017-10-23 17:51:41
近年來(lái),隨著人們對(duì)駕駛安全水平需求的不斷提高,高級(jí)駕駛輔助系統(tǒng)(ADAS)相關(guān)技術(shù)的不斷成熟,伴隨著ADAS市場(chǎng)高速發(fā)展,攝像頭的需求也更加旺盛。其應(yīng)用場(chǎng)景也是非常多的,主要是以下幾個(gè)應(yīng)用場(chǎng)景:倒車(chē)
2022-11-08 08:08:48
的開(kāi)發(fā)者能夠輕松開(kāi)發(fā)智能攝像頭應(yīng)用和產(chǎn)品。來(lái)自 Arm 和更廣泛生態(tài)系統(tǒng)的支持Arm 將持續(xù)在最新的 64 位架構(gòu)規(guī)格版本中提供與數(shù)字信號(hào)處理、矢量處理、機(jī)器學(xué)習(xí)和安全有關(guān)的增強(qiáng)功能,所有這些都是未來(lái)
2022-01-11 08:00:00
3D 成像也可用于自動(dòng)駕駛應(yīng)用,以幫助汽車(chē)了解場(chǎng)景(因?yàn)樗兄诜蛛x背景和前景),或在汽車(chē)內(nèi)部用于人臉識(shí)別或手勢(shì)檢測(cè)系統(tǒng)。圖 2:(a) TI 針對(duì)其 TOF 傳感器的攝像頭開(kāi)發(fā)工具框圖。 (b
2017-04-12 14:44:45
機(jī)器學(xué)習(xí)算法如何用于制造無(wú)人駕駛汽車(chē)
2021-03-18 06:27:18
麻煩推薦一個(gè)支持usb攝像頭的mcu ;像素點(diǎn)400萬(wàn)
2022-06-17 07:43:01
解了些谷歌的無(wú)人駕駛汽車(chē)中的雷達(dá)和視覺(jué)輔助駕駛技術(shù)。俺的感受就是——我們還在起步,差距巨大! 先說(shuō)說(shuō)咱們聯(lián)合開(kāi)發(fā)的方案(說(shuō)是聯(lián)合開(kāi)發(fā),基本上都是世強(qiáng)和方案公司、主芯片廠商瑞薩的技術(shù)力量為主,咱們打打
2014-03-13 18:09:55
初創(chuàng)公司進(jìn)入自動(dòng)駕駛市場(chǎng)的一個(gè)門(mén)檻較低的入口。攝像頭:車(chē)載攝像頭是最基本常見(jiàn)的傳感器,價(jià)格低廉且應(yīng)用廣泛同時(shí)具備雷達(dá)無(wú)法完成的圖像識(shí)別功能,不僅可以識(shí)別路牌,在自動(dòng)駕駛系統(tǒng)的圖像處理方案中也是不可或缺
2017-09-06 11:36:58
向知名激光雷達(dá)廠家Velodyne公司投資1.5億美元,進(jìn)行激光雷達(dá)系統(tǒng)的研發(fā)和生產(chǎn),從而加大無(wú)人駕駛技術(shù)的研發(fā)力……可以說(shuō),掌握了激光雷達(dá)系統(tǒng)的奧秘,就掌握了無(wú)人駕駛技術(shù)的命門(mén),如果能在這場(chǎng)新時(shí)代的汽車(chē)產(chǎn)業(yè)革命中獲得先機(jī),那么拿下入場(chǎng)未來(lái)駕駛的門(mén)票則不在話下。`
2017-10-20 15:49:06
。 據(jù)了解,百度無(wú)人駕駛車(chē)項(xiàng)目起于2013年,由百度研究院主導(dǎo)研發(fā),其技術(shù)核心是“百度汽車(chē)大腦”,包括高精度地圖、定位、感知、智能決策與控制四大模塊。百度無(wú)人駕駛車(chē)依托國(guó)際領(lǐng)先的交通場(chǎng)景物體識(shí)別技術(shù)和環(huán)境
2015-12-12 16:53:14
的夢(mèng)想真的不再遙遠(yuǎn)。福特汽車(chē)的CEO馬克·菲爾茲(Mark Fields)根據(jù)媒體報(bào)道稱(chēng),馬克·菲爾茲在總部發(fā)表演講上表示,5年內(nèi)將會(huì)有汽車(chē)企業(yè)發(fā)布無(wú)人駕駛汽車(chē),但不會(huì)是福特,因?yàn)楣粳F(xiàn)階段的主要任務(wù)
2017-02-07 14:58:38
及使用也非常易懂。在維護(hù)性方面,系統(tǒng)的接線十分簡(jiǎn)潔,而主要設(shè)備的可靠性很高,維護(hù)性能好,而且可實(shí)現(xiàn)遠(yuǎn)程維護(hù); 網(wǎng)絡(luò)攝像頭擴(kuò)展及延伸性:當(dāng)需要增加監(jiān)控點(diǎn)和監(jiān)控主機(jī)時(shí),只需要通過(guò)現(xiàn)有網(wǎng)絡(luò)增加一臺(tái)攝像機(jī)或
2009-03-25 15:26:56
你們好:懂了一單片機(jī)常識(shí),現(xiàn)想做可晃頭攝像頭,因?yàn)榈管?chē)看不到后面容易碰到東西,后視鏡是有盲區(qū)的。做一個(gè)鍵盤(pán),可操控攝像頭往后盲區(qū)掃描,在屏幕上動(dòng)態(tài)顯示后方情景,可調(diào)移動(dòng)速度,方向,就像人眼往后面掃描,用步進(jìn)電機(jī)可以嗎?
2016-07-23 02:46:37
攝像頭、雷達(dá)和LIDAR,自動(dòng)駕駛汽車(chē)選擇誰(shuí)?
2020-11-23 12:32:36
前兩天,百度已經(jīng)在北京完成路測(cè),如今國(guó)外又傳來(lái)谷歌無(wú)人駕駛汽車(chē)的消息。12月14日,谷歌在過(guò)去的兩年里,不斷與英國(guó)***進(jìn)行多次會(huì)談,希望能在英國(guó)推廣無(wú)人駕駛汽車(chē)。谷歌認(rèn)為,無(wú)人駕駛汽車(chē)技術(shù)可以讓
2015-12-14 14:07:13
我想給我的貨車(chē)尾部加裝一個(gè)攝像頭,然后在駕駛裝個(gè)顯示屏,具體怎么操作呢?需要哪些東西?我想自己買(mǎi)材料自己制作,求高人指點(diǎn)!謝謝!
2013-06-18 11:59:35
自動(dòng)駕駛汽車(chē)的夢(mèng)想正在成為現(xiàn)實(shí)。通過(guò)在車(chē)輛中實(shí)現(xiàn)多種先進(jìn)的駕駛員輔助系統(tǒng)(ADAS),汽車(chē)行業(yè)對(duì)于完全自動(dòng)駕駛的追求正在穩(wěn)步推進(jìn)。如今,幾乎所有汽車(chē)經(jīng)銷(xiāo)商的新款車(chē)都配備了多個(gè)攝像頭、雷達(dá)和超聲波傳感器,可實(shí)現(xiàn)如輔助自動(dòng)泊車(chē)、自動(dòng)緊急制動(dòng)、車(chē)道輔助行駛、司機(jī)疲勞駕駛警報(bào)等基于感知的各項(xiàng)功能。
2019-07-29 08:26:19
自動(dòng)駕駛汽車(chē)的夢(mèng)想正在成為現(xiàn)實(shí)。通過(guò)在車(chē)輛中實(shí)現(xiàn)多個(gè)高級(jí)駕駛輔助系統(tǒng)(ADAS),汽車(chē)行業(yè)對(duì)自動(dòng)駕駛的追求正在穩(wěn)步推進(jìn)。當(dāng)今的新車(chē)均已配備多個(gè)攝像頭、雷達(dá)和超聲波傳感器,實(shí)現(xiàn)基于感知的輔助功能,如
2022-11-10 08:09:48
的環(huán)境感知系統(tǒng)一般由多個(gè)傳感器組成,包括激光雷達(dá)、毫米波雷達(dá)、攝像頭、GPS 等。其中,攝像頭、毫米波雷達(dá)、激光雷達(dá)是無(wú)人駕駛汽車(chē)中最常用的三種環(huán)境感知解決方案。 攝像頭的優(yōu)點(diǎn)是成本低廉,圖像算法
2017-08-21 14:54:32
了Qualcomm Hexagon DSP,可為飛行器提供實(shí)時(shí)控制。此外還有2x2 Wi-Fi、藍(lán)牙、以及對(duì)全球衛(wèi)星定位導(dǎo)航系統(tǒng)的支持;視頻方面,其支持4K和720p的第一人稱(chēng)視角、4K立體VGA攝像頭、光流
2015-10-27 23:47:05
汽車(chē)智能化浪潮洶涌而來(lái),智能駕駛和智能座艙已成為智能汽車(chē)必不可少的組成部分。車(chē)載攝像頭是智能駕駛和智能座艙中的核心感知設(shè)備,具有識(shí)別能力強(qiáng)、更符合人眼視覺(jué)感知的優(yōu)點(diǎn),所獲取的圖像既可以輸入給屏幕系統(tǒng)
2022-07-19 13:20:45
的攝像頭去承擔(dān)更多感知任務(wù)的討論。本文探索了基于計(jì)算機(jī)視覺(jué)的無(wú)人駕駛感知方案。首先,驗(yàn)證一個(gè)方案是否可行需要一個(gè)標(biāo)準(zhǔn)的測(cè)試方法,我們介紹了廣泛被使用的無(wú)人駕駛視覺(jué)感知數(shù)據(jù)集KITTI。然后,我們討論了在無(wú)人駕駛場(chǎng)景中使用到的具體
2017-09-30 16:13:43 0
0 全球照明與電子領(lǐng)域的領(lǐng)導(dǎo)企業(yè)海拉日前發(fā)布前置攝像頭軟件的全新業(yè)務(wù)模式,進(jìn)一步推動(dòng)無(wú)人駕駛技術(shù)的發(fā)展進(jìn)程。海拉位于柏林的子公司海拉Aglaia推出了一款基于攝像頭的駕駛輔助系統(tǒng)開(kāi)放平臺(tái)。該平臺(tái)可使用戶
2018-04-26 18:21:001569 無(wú)人駕駛是三大要素的結(jié)合:軟件、硬件以及綜合控制系統(tǒng)。總的來(lái)說(shuō),無(wú)人駕駛涉及感知、定位、規(guī)劃、控制和線控五個(gè)方面,六項(xiàng)技術(shù)與這五個(gè)方面相互交織在一起,實(shí)現(xiàn)了無(wú)人駕駛。
2018-07-30 18:25:007971 本文介紹了無(wú)人駕駛系統(tǒng)的基本結(jié)構(gòu),無(wú)人駕駛軟件系統(tǒng)通常被劃分為三層:感知,規(guī)劃和控制。
2018-08-06 10:56:2917707 
在世界人工智能大會(huì)的現(xiàn)場(chǎng),仙途智能展示了其無(wú)人駕駛環(huán)衛(wèi)車(chē)。這輛無(wú)人環(huán)衛(wèi)車(chē)是面向開(kāi)放道路行駛的,搭載有5顆16線Velodyne激光雷達(dá),4顆1080P高清攝像頭(前視兩顆為深度學(xué)習(xí)使用),2顆24G大陸的毫米波雷達(dá),前向監(jiān)控用的攝像頭。
2018-09-21 10:22:3512438 北京圖森未來(lái)科技有限公司(以下簡(jiǎn)稱(chēng)圖森)對(duì)外發(fā)布其最新無(wú)人駕駛視覺(jué)感知系統(tǒng)。
2019-03-22 14:19:113066 通過(guò)應(yīng)用索尼最先進(jìn)的汽車(chē)CMOS圖像傳感器,該感知方案可將無(wú)人駕駛卡車(chē)使用率提高到80%。
2019-03-25 09:02:442477 基于本人對(duì)無(wú)人駕駛系統(tǒng)的理解,對(duì)無(wú)人駕駛系統(tǒng)的軟件架構(gòu)進(jìn)行分層,大致分別以下3層:感知層、決策層與控制層。
2019-07-08 10:09:045781 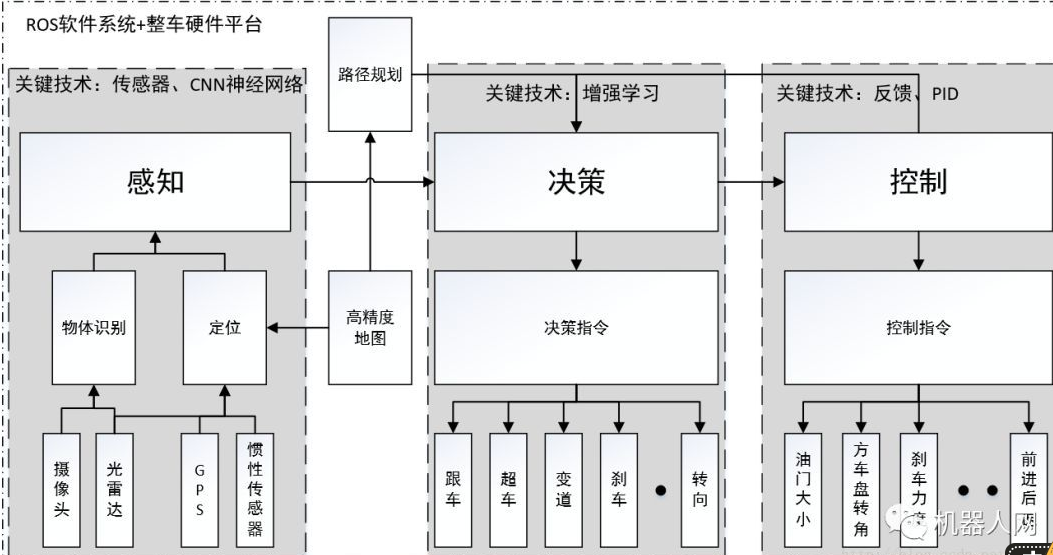
本文主要闡述了無(wú)人駕駛汽車(chē)的優(yōu)點(diǎn)與缺點(diǎn)及無(wú)人駕駛汽車(chē)的未來(lái)。
2020-09-01 15:31:2215320 ,馭勢(shì)科技已在乘用車(chē)自動(dòng)駕駛、無(wú)人小巴等載人無(wú)人駕駛領(lǐng)域取得領(lǐng)先成就。 近年來(lái),馭勢(shì)科技著眼于物流行業(yè)用戶的實(shí)際痛點(diǎn),依托自研核心駕駛平臺(tái)U-Drive智能駕駛系統(tǒng),為物流行業(yè)提供面向未來(lái)的無(wú)人物流解決方案,特別是針對(duì)汽車(chē)物流、機(jī)場(chǎng)物流和食品
2020-11-18 09:59:172643 汽車(chē)的發(fā)展前景或者未來(lái)予以介紹。無(wú)人駕駛作為汽車(chē)未來(lái)的研究方向,其對(duì)于汽車(chē)行業(yè)甚至是交通運(yùn)輸業(yè)有著深遠(yuǎn)的影響。無(wú)人駕駛汽車(chē)的來(lái)臨將能夠解放人類(lèi)的雙手,降低發(fā)生交通事故發(fā)生的頻率,保證了人們的安全。同時(shí)隨著人
2020-11-30 03:03:0022 無(wú)人駕駛汽車(chē),又稱(chēng)自動(dòng)駕駛汽車(chē)或輪式移動(dòng)機(jī)器人,是一種運(yùn)輸動(dòng)力的無(wú)人地面載具。我們理想的無(wú)人駕駛汽車(chē)是無(wú)需人類(lèi)操作即能從地點(diǎn)A行駛到地點(diǎn)B,不管途中環(huán)境多復(fù)雜天氣多惡劣都由機(jī)器自己完成。無(wú)人駕駛汽車(chē)的核心在于無(wú)人駕駛技術(shù),如果說(shuō)汽車(chē)工業(yè)是制造業(yè)的皇冠,那么無(wú)人駕駛技術(shù)就是皇冠上的明珠。
2022-02-14 14:54:575180 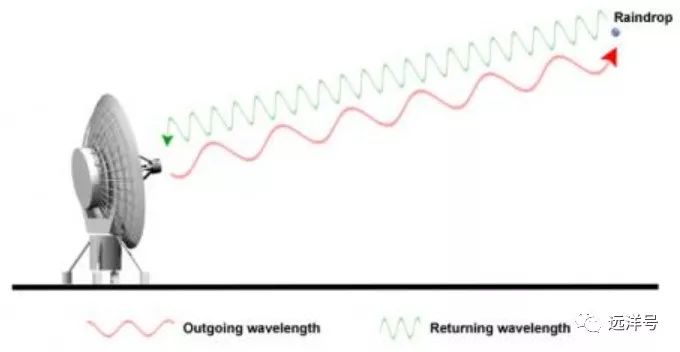
無(wú)人駕駛技術(shù)的核心是以感知處理與智能決策為主要的核心技術(shù)路線,采用高級(jí)感應(yīng)技術(shù)、語(yǔ)言識(shí)別技術(shù)、機(jī)器視覺(jué)技術(shù)、圓點(diǎn)云技術(shù)等重要技術(shù)手段,構(gòu)建智能感知與決策控制系統(tǒng),以實(shí)現(xiàn)車(chē)輛感知、決策和行駛的自動(dòng)化
2023-04-26 10:24:003119 詳解無(wú)人駕駛傳感器:攝像頭、激光雷達(dá)、雷達(dá)、溫度傳感器
2023-12-07 10:51:56662 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論