我們現(xiàn)在要做一個(gè)在高壓線上行走除冰的機(jī)構(gòu),需要檢測(cè)電線上的障礙并越障。檢測(cè)其中一種障礙時(shí)遇到了困難,求各位前輩們指點(diǎn),感激不盡!!!這種障礙物是防震錘,我上傳了實(shí)物圖和尺寸圖。圖中D=h=20mm
2014-04-02 19:03:10
ANYmal機(jī)器人的實(shí)驗(yàn)版本具有腿和腳,蘇黎世聯(lián)邦理工學(xué)院步行,有腿的機(jī)器人可能擅長(zhǎng)于越過障礙物,但車輪在光滑地面上行駛?cè)匀桓行省_@就是蘇黎世聯(lián)邦理工學(xué)院的工程師向其現(xiàn)有的ANYmal四足機(jī)器人
2021-08-30 08:02:03
小車的超聲波模塊來(lái)檢測(cè)前方是否存在障礙物,計(jì)算出與障礙物之間的距離。當(dāng)與障礙物的距離小于或等于我們預(yù)設(shè)的安全距離時(shí),控制小車進(jìn)行轉(zhuǎn)向避開障礙物;當(dāng)與障礙物的距離大于我們預(yù)設(shè)的安全距離時(shí),控制小車進(jìn)行繼續(xù)前進(jìn)
2018-05-22 10:13:28
=transparent]P19 IN1[/tr] 程序設(shè)計(jì)偽代碼分析讓我們先用偽代碼來(lái)分析一下避障車的程序邏輯。首先,我們通過小車的超聲波模塊來(lái)檢測(cè)前方是否存在障礙物,計(jì)算出與障礙物之間的距離。當(dāng)
2018-03-14 10:09:38
樣的新朋友--“會(huì)思考的避障車”。“會(huì)思考的避障車”和我們平時(shí)的遙控車最主要的區(qū)別就是智能化,它可以不需要我們?nèi)ゲ倏兀约壕湍苄凶摺M瑫r(shí)它還會(huì)實(shí)時(shí)檢測(cè)前方是否有障礙物,思考自己是否要前進(jìn)或者轉(zhuǎn)彎。看到這里
2018-09-08 10:00:10
我們做的科技創(chuàng)新,通過紅外開關(guān)檢測(cè)障礙物:有障礙物:0;無(wú)障礙物:1;若有障礙物,給單片機(jī)應(yīng)引腳PB1輸入信號(hào),然后使PB2輸出信號(hào)0蜂鳴器響,通過PA輸出與另外一外一片芯片L293D相連輸出信號(hào)
2012-04-02 16:05:16
算用它diy個(gè)越野車、、、廢話不多說(shuō)看圖片、手機(jī)照的……[/url][url=http://www.geekfans.com/data/attachment/portal/201203/06
2012-03-14 09:46:18
申請(qǐng)理由:超聲波和紅外線檢測(cè)都有局限性,超聲波會(huì)因?yàn)橹車?b class="flag-6" style="color: red">障礙物誤判,而紅外線會(huì)因?yàn)榻嵌葐栴}影響效果。在較小范圍內(nèi)藍(lán)牙卻是一個(gè)更好的選擇,藍(lán)牙通信適用于短距離,前車的加減速和轉(zhuǎn)彎會(huì)通過藍(lán)牙發(fā)送到后車
2015-07-16 19:53:08
測(cè)前方的障礙物,加上自己的一個(gè)步進(jìn)電機(jī)(加步進(jìn)點(diǎn)擊是為了多向測(cè)試障礙物,正前方的,左前方,右前方,三個(gè)方向的障礙物的距離,做出最合理的判斷)左右旋轉(zhuǎn)測(cè)量障礙物的距離,做出最合理的判斷,然后通過電機(jī)驅(qū)動(dòng)模塊驅(qū)動(dòng)電機(jī)往哪個(gè)方向走。最后走出自己設(shè)計(jì)的迷宮。
2015-10-29 14:14:41
我想做一個(gè)卷閘門下行過程中的障礙物探測(cè)器,就是在下行的過程中如果探測(cè)到門下面有障礙物的存在則停止下行,現(xiàn)在沒有思路。各位大俠給個(gè)思路,怎么樣來(lái)實(shí)現(xiàn)、需要具體哪些設(shè)備來(lái)完成這個(gè)功能。
2013-08-24 09:51:02
我想做一個(gè)卷閘門下行過程中的障礙物探測(cè)器,就是在下行的過程中如果探測(cè)到門下面有障礙物的存在則停止下行,現(xiàn)在沒有思路。各位大俠給個(gè)思路,怎么樣來(lái)實(shí)現(xiàn)、需要具體哪些設(shè)備來(lái)完成這個(gè)功能。
2013-08-24 09:55:41
本帖最后由 zeng10119 于 2017-3-21 12:01 編輯
有懂避障這方面的嗎?繞過障礙物的程序思路怎么寫?找了好多自動(dòng)壁障車資料,都是無(wú)腦避障,要么是遇到障礙物左轉(zhuǎn)或右轉(zhuǎn),要么是遇到障礙物180°轉(zhuǎn)彎。算法思路怎么搞?
2017-03-21 10:57:54
汽車、鐵馬新能源汽車、三菱新能源汽車、日野新能源汽車、尼桑新能源汽車、五十鈴新能源汽車、東風(fēng)、解放等新能源車型回收。5:新能源越野車回收:解放30、東風(fēng)240、躍進(jìn)221等車型。6全國(guó)上門回收汽車底盤
2021-10-02 08:56:36
回收一切工控配件:回收西門子、三菱、松下、施克、SICK、SMC、FESTO、費(fèi)斯托、CKD、歐姆龍、基恩士、小金井、陽(yáng)明、施耐德、臺(tái)達(dá)、富士、AB、信捷、山武、普洛菲斯、海泰克、士林、永宏 等等品牌
2020-01-09 11:08:49
、軋路車、挖掘機(jī)、水泥攪拌車、冷藏車等。4:新能源運(yùn)輸車回收:奔馳、鐵馬、三菱、日野、尼桑、五十鈴、東風(fēng)、解放等車型。5:新能源越野車回收:解放30、東風(fēng)240、躍進(jìn)221等車型。6; 回收汽車底盤
2021-11-23 13:06:27
;nbsp;2013.12控制器性能與功能試驗(yàn)、文檔歸總編寫3、擬解決的關(guān)鍵問題(1)智能性 當(dāng)踏板伸出時(shí)碰到障礙物,踏板動(dòng)作停止、收回踏板
2013-10-12 15:55:56
?2019.3一2019.7 基于MK60DN512ZVLQ10 的室外自動(dòng)尋跡智能越野車(集體項(xiàng)目)?2020.3一2020.7 基于NXP i.MX RT1064的電磁AI尋跡智能小車(集體項(xiàng)目
2021-12-20 07:11:07
通過攝像頭對(duì)周圍環(huán)境信息的實(shí)時(shí)采集,如果當(dāng)鏡頭前方出現(xiàn)障礙物時(shí)候,以一定的方式(聲音或振動(dòng)之類的)反饋出來(lái)。主要考慮的是實(shí)現(xiàn)盲人室內(nèi)導(dǎo)盲作用,不需要太過于考慮實(shí)際使用,只要能實(shí)現(xiàn)判定到障礙物,自動(dòng)提醒就行啦。怎么判定前方出現(xiàn)障礙物,一直困擾著我。求大神指個(gè)思路,能有程序框圖就更好了
2017-03-14 07:58:55
我想要做一個(gè)道路障礙物檢測(cè)系統(tǒng)。就是在路面上安一個(gè)檢測(cè)器,一旦有障礙物擋住,且在路上停留一段時(shí)間,就發(fā)射信號(hào)報(bào)警,使二極管發(fā)光。現(xiàn)在我想請(qǐng)教一下是不是檢測(cè)用紅外線好一點(diǎn),延時(shí)用單片機(jī)程序大概要怎么寫?電路什么的怎么連啊?求大神解答
2015-03-10 13:33:26
總體設(shè)計(jì)本設(shè)計(jì)是使用AT89C51單片機(jī)為核心制作的一個(gè)模擬溫控電扇的系統(tǒng)。通過DS18B20溫度傳感器來(lái)實(shí)現(xiàn)溫度的調(diào)節(jié),使用四位一體數(shù)碼管來(lái)顯示電扇的擋位以及當(dāng)前溫度,通過proteus中
2021-07-14 08:23:39
自動(dòng)避開障礙物繼續(xù)前進(jìn)。3.語(yǔ)音播報(bào)(JQ8400)播報(bào)指定的語(yǔ)音,達(dá)到人機(jī)交互與娛樂。4.WIFI模塊實(shí)時(shí)顯示小車的當(dāng)前的運(yùn)行狀態(tài)。4.整體架構(gòu)通過超聲波車距和...
2021-11-08 08:00:20
怎么弄呢,不會(huì)都是圖片吧?顯然不是的,對(duì)障礙物的拆解如下圖所示:看到了吧,障礙物是由兩張小圖片和繪制一個(gè)矩形得到的。這個(gè)是下邊的障礙物,那上邊的障礙物怎么繪制呢?是要用rotation功能把圖片旋轉(zhuǎn)180
2022-04-06 10:06:11
);//左轉(zhuǎn)1800MSControlCar(1);//前進(jìn)}if(front== 1)//如果前面避障傳感器沒有檢測(cè)到障礙物,高電平{ControlCar(1); //右側(cè)沒有信號(hào)時(shí),開始向左轉(zhuǎn)一定的角度
2020-04-19 22:50:58
本設(shè)計(jì)采用AT89C52為主要控制芯片的智能車,HC-SR04為超聲波測(cè)距傳感器。該汽車避障系統(tǒng)擁有自動(dòng)聲光報(bào)警、超聲波測(cè)距,自動(dòng)避開障礙物等功能。當(dāng)汽車與障礙物之間的距離小于安全距離35cm
2022-01-05 08:30:17
我正在設(shè)計(jì)一個(gè)也能避開各種障礙物(兩個(gè)數(shù)字紅外 (IR) 傳感器)的巡線機(jī)器人,但由于我是電子學(xué)初學(xué)者,所以我對(duì)我的原理圖有點(diǎn)困惑,這就是為什么我想知道是否我的原理圖是正確的,如果它能工作的話
2022-12-07 07:49:08
我和隊(duì)友想做一個(gè)反恐偵察車,主要功能就是在小車前面放一個(gè)紅外攝像頭,遠(yuǎn)程監(jiān)控,將小車放置到一個(gè)陌生的環(huán)境,比如黑暗的***的老巢,四周的地形比較復(fù)雜,小車上加個(gè)激光測(cè)距的裝置,實(shí)時(shí)測(cè)量離四周障礙物
2016-09-25 23:28:00
請(qǐng)問隔著一個(gè)很大的障礙物,怎么才能探測(cè)到障礙物后面的汽車呢(汽車沒有安裝特殊的設(shè)備,就一普通汽車)?
2013-11-22 15:12:08
百度網(wǎng)上和查閱教材了半天,只得到不外乎反復(fù)互相拷貝引用的兩種說(shuō)法:1、“對(duì)于所設(shè)計(jì)的每一個(gè)電源層,一系列障礙物線將自動(dòng)的創(chuàng)建在板框周圍,這些線在屏幕上不可編輯,建立的障礙物線是原來(lái)設(shè)置寬度的兩倍
2017-11-04 11:27:16
、水泥攪拌車、冷藏車等。4:新能源運(yùn)輸車回收:奔馳新能源汽車、鐵馬新能源汽車、三菱新能源汽車、日野新能源汽車、尼桑新能源汽車、五十鈴新能源汽車、東風(fēng)、解放等新能源車型回收。5:新能源越野車回收:解放30
2021-09-14 11:13:37
小弟想做一個(gè)小車,51控制,檢測(cè)模塊采用光電開關(guān)和紅外對(duì)管(有障礙物都是低電平,無(wú)障礙物高電平),但是我如何控制它們的邏輯關(guān)系,需要什么模塊嗎,求大俠講解
2019-01-30 02:13:05
小弟想做一個(gè)小車,51控制,檢測(cè)模塊采用光電開關(guān)和紅外對(duì)管(有障礙物都是低電平,無(wú)障礙物高電平),但是我如何控制它們的邏輯關(guān)系,需要什么模塊嗎,求大俠講解
2012-08-25 08:53:52
項(xiàng)目說(shuō)明:本小車采用智能控制,能夠按照設(shè)定程序自行躲避障礙物,實(shí)現(xiàn)自身的特色。傳統(tǒng)的無(wú)線遙控汽車只能通過人為的干涉躲避行駛途中的障礙物,但人為去操作小車既麻煩又費(fèi)勁。由此,我們專門設(shè)計(jì)了全自動(dòng)躲避
2013-10-26 23:40:59
我們?cè)O(shè)計(jì)的這款智能機(jī)器人,通過語(yǔ)音識(shí)別功能對(duì)智能機(jī)器人進(jìn)行遙控,遙控的語(yǔ)音指令有前進(jìn)、后退、左拐、右拐等運(yùn)動(dòng)控制指令,另外還加入一個(gè)音頻播放器,可以通過語(yǔ)音對(duì)播放器進(jìn)行控制,遙控的語(yǔ)音指令有上一
2013-10-26 22:50:23
最近做了一個(gè)遙控小車 前進(jìn)后退都沒有問題 但是有時(shí)候不按遙控器后 車子自己會(huì)轉(zhuǎn) 怎么破
2017-05-10 22:19:51
最近正在玩一個(gè)遙控四驅(qū)越野車,想改裝一下,想知道它的電機(jī)驅(qū)動(dòng)電路,有沒有高人知道,知道一下!通過測(cè)試給7.2%的占空比的PWM信號(hào)電機(jī)不轉(zhuǎn),10%的差不多是正向最大速,5%的是反向最大速!
2012-05-18 20:36:11
檢測(cè)障礙物有什么什么傳感器,用紅外反射還是超聲波測(cè)距,或者還有其他傳感器?
2023-11-08 06:33:49
點(diǎn)檢測(cè)到薄鐵片后在C點(diǎn)處停車5秒,停車期間發(fā)出斷續(xù)的聲光信息。(3)電動(dòng)車在光源的引導(dǎo)下,通過障礙區(qū)進(jìn)入停車區(qū)并到達(dá)車庫(kù)。電動(dòng)車必須在兩個(gè)障礙物之間通過且不得與其接觸。 (4)電動(dòng)車完成上述任務(wù)后應(yīng)立即停車,但全程行駛時(shí)間不能大于90秒,行駛時(shí)間達(dá)到90秒時(shí)必須立即自動(dòng)停車。
2015-03-18 22:49:26
電路設(shè)計(jì)要求:在一個(gè)數(shù)量為8*9的方格上安裝LED燈(LED為5w,共安裝72個(gè)),要求每個(gè)燈感應(yīng)到障礙物可以常亮,障礙物移走則熄滅。(障礙物距離燈20-300mm)方格四個(gè)角同時(shí)遇到障礙物時(shí)電路通電,移走障礙物電路斷電。
2020-03-06 11:24:08
本帖最后由 gk320830 于 2015-3-8 14:20 編輯
急需用到2米內(nèi)障礙物感應(yīng)器,帶開關(guān)功能或者高手幫忙設(shè)計(jì)個(gè)輔助開關(guān)電路,24V電源供電,多謝
2013-03-07 21:58:40
,及時(shí)準(zhǔn)確地測(cè)量出行駛中的車輛前方障礙物的距離,可以對(duì)駕駛員起到提前“預(yù)警”的作用,減少和避免撞車事故2,防止汽車拐彎時(shí),和盲點(diǎn)車側(cè)面相撞或者刮蹭,3,行至交叉口時(shí)可通過雷達(dá)判斷是否堵車,3,通過智能
2012-04-25 16:39:57
用labview設(shè)計(jì)超級(jí)馬里奧游戲時(shí)如何加障礙物
2017-05-09 13:33:15
第一次做機(jī)器人,也是第一次來(lái)論壇發(fā)帖。我在設(shè)計(jì)一個(gè)越野車,可以過一些簡(jiǎn)單的路障,跟隨引導(dǎo)線前進(jìn)的。我有幾個(gè)問題不明白:1、跟隨引導(dǎo)線(白色)前進(jìn)是什么原理?攝像頭識(shí)別白色引導(dǎo)前進(jìn)么?2、如果車沿著
2014-07-17 16:34:09
我現(xiàn)在需要使用紅外檢測(cè)一個(gè)比較小的障礙物,直徑兩厘米,黑色,金屬。很多紅外檢測(cè)模塊的賣家都不確定可以檢測(cè)的到,我現(xiàn)在有一個(gè)想法,不知道可不可行。我想檢測(cè)不到應(yīng)該是因?yàn)檫@個(gè)障礙物對(duì)紅外的反射比較
2014-04-03 11:28:56
想用單片機(jī)直接通過串口連接激光雷達(dá),測(cè)障礙物,該激光雷達(dá)波特率230400,是arduino的極限115200的兩倍,所以要用STM32的芯片了。其數(shù)據(jù)手冊(cè)說(shuō)的還是不清楚,固連接電腦的串口根據(jù)測(cè)得
2022-02-24 06:31:00
......{:4:}于是,求教萬(wàn)能的吧友們,有沒有好的定位及找車位方案。。。。。。。。。。。。。。。。。。。。。。。。。。真心感謝啊!!!!具體要去如下:一、任務(wù)設(shè)計(jì)并制作一個(gè)簡(jiǎn)易智能電動(dòng)車,具有自動(dòng)泊車功能
2014-07-19 23:40:43
通過車載無(wú)人機(jī)來(lái)解決快遞的“最后一公里”。 在今年的CES展上,奔馳帶來(lái)了一款流線型的無(wú)人機(jī)貨運(yùn)車,無(wú)人機(jī)嵌套在貨運(yùn)車上。這個(gè)汽車有一個(gè)超大尺寸的智能LED顯示屏。 這個(gè)無(wú)人機(jī)貨運(yùn)車解決方案是由奔馳
2018-07-14 15:43:38
,無(wú)線傳感器網(wǎng)絡(luò)傳輸實(shí)時(shí)通過藍(lán)牙診斷信息和警報(bào)技術(shù),包括輪胎壓力和條件警報(bào)必不可少的系統(tǒng)。目前的預(yù)測(cè)由市場(chǎng)研究機(jī)構(gòu)ABI Research的預(yù)測(cè),到2024年,在道路上所有車輛(轎車,越野車和商務(wù)車
2020-11-26 11:36:20
近日,在日本東北大學(xué)等組成的團(tuán)隊(duì)開發(fā)出一款蛇形機(jī)器人,可以穿越災(zāi)區(qū)中比較高的障礙物在廢墟內(nèi)部展開搜索。想必大家都想知道這款蛇形機(jī)器人是怎么樣的,那么到底怎么樣的呢?讓我們一起來(lái)看看詳細(xì)介紹。 日本
2017-06-20 11:35:30
`這輛汽車對(duì)于科技愛好者絕不陌生,這就是谷歌研發(fā)的無(wú)人駕駛汽車。在行駛過程中,無(wú)人車需要感知周圍環(huán)境,但無(wú)法像人一樣用眼睛完成,這一切就要依靠車頂安裝的激光雷達(dá)。該裝置可檢測(cè)周圍障礙物,并及時(shí)反饋
2018-09-10 16:32:46
統(tǒng)在三個(gè) LED 的幫助下工作,這些 LED 可作為汽車后方距離的指示器。該系統(tǒng)布置在汽車的后部。該系統(tǒng)由一個(gè) 12V 電池供電,該電池與汽車點(diǎn)火系統(tǒng)中使用的電池相同。汽車與任何障礙物之間的距離是通過
2022-06-21 07:27:45
本帖最后由 gk320830 于 2015-3-8 20:36 編輯
設(shè)計(jì)完P(guān)CB后走線不能躲避障礙物時(shí)什么情況?已經(jīng)設(shè)置了躲避障礙物還是不能躲避
2012-12-20 08:47:57
Infrared Proximity Sensor如何檢測(cè)前方是否有障礙物
2020-11-06 07:57:22
最近要參加一個(gè)比賽,尋跡越野,中間的障礙物有斷崖和山坡,所有不能用簡(jiǎn)單的檢測(cè)前方有東西就變道請(qǐng)問各位大神有什么好的想法呢
2018-08-07 17:29:52
本帖最后由 7681196 于 2016-4-24 14:17 編輯
最近參加學(xué)校一個(gè)比賽,就是用51單片機(jī)實(shí)現(xiàn)飛機(jī)避開障礙物的游戲,游戲規(guī)則就是飛機(jī)通過移動(dòng)來(lái)避開障礙物,碰到則游戲結(jié)束,有
2016-04-24 13:52:52
收起。同時(shí)可通過中控臺(tái)鎖死踏板,這個(gè)功能在不適合伸出踏板的特殊環(huán)境,譬如車停在崎嶇不平的路面上時(shí)將大有用處,能有效保護(hù)踏板和車身另外讓人眼前一亮的是,這款踏板還配備了智能防夾功能,在伸出或縮回的運(yùn)行
2019-08-10 14:43:51
有沒有誰(shuí)愿意給我做一個(gè)遙控車套件(發(fā)射、接收、輸出模塊),我拿過來(lái)只需要接上電源、電機(jī)就可以使用。1、車重大約50公斤,功能和壓路機(jī)差不多,車是前后輪分別為兩個(gè)滾筒。此車是壓路機(jī)的縮小版;2、驅(qū)動(dòng)我
2016-01-14 19:55:31
遇障礙物時(shí)語(yǔ)音提示前方危險(xiǎn),請(qǐng)注意。語(yǔ)音模塊是isd1820單片機(jī)51 求幫忙
2017-02-24 21:43:00
為什么有些東西,遇到障礙物會(huì)自動(dòng)返回,是哪一種傳感器嗎?哪里有沒有這類的電路圖介紹下,非常感謝
2011-09-10 21:14:25
6AV2-124所有型號(hào) 回收新一代精簡(jiǎn)面板6AV6所有型號(hào),回收SMAPT精簡(jiǎn)面板6AV6-648所有型號(hào),常年,高價(jià)回收一切自動(dòng)化電子設(shè)備器件回收二手回收要求、外觀完好、沒有明顯劃痕、沒有破損、年份
2020-07-28 08:45:20
`高價(jià)回收拆機(jī)CPU模塊,回收6ES7-288一切系列模塊,回收擴(kuò)展模塊,回收二手全新一切電子元件高價(jià)回收工程余貨,工程尾料,工廠拆機(jī)設(shè)備,工廠拆除設(shè)備 工廠倒閉回收一切工控?cái)?shù)控模塊,觸摸屏,CPU
2020-07-02 08:33:45
北京帕杰羅越野車和秦川福萊爾轎車電路圖,發(fā)動(dòng)機(jī)電路圖,底盤電路圖,電氣系統(tǒng)電路圖
2008-08-05 23:00:41 152
152
獵豹越野車汽車電路圖,發(fā)動(dòng)機(jī)電路圖,底盤電路圖,電氣系統(tǒng)電路圖
2008-08-05 23:07:51307 金杯通用雪佛蘭開拓者越野車電路圖,發(fā)動(dòng)機(jī)電路圖,底盤電路圖,電氣系統(tǒng)電路圖
2008-08-05 23:13:05133 障礙物檢測(cè)實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康摹靶L(fēng)”小車在運(yùn)動(dòng)過程中要成功避開障礙物必須在一定距離外就探測(cè)到障礙物。在小車上探測(cè)障礙物
2009-03-23 10:47:29 2348
2348 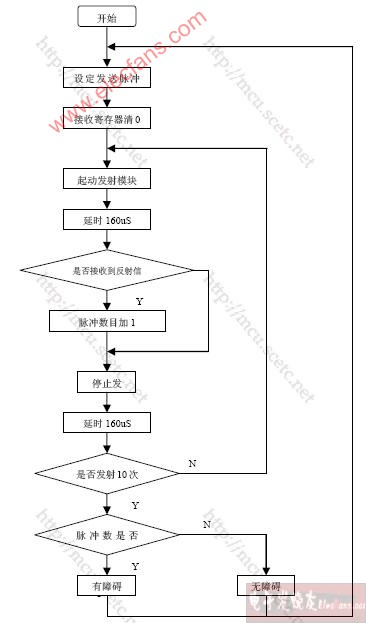
障礙物方位檢測(cè)實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康男≤囋谶\(yùn)動(dòng)中要成功避開障礙物,除了要檢測(cè)是否有障礙物外,還需要判斷障礙物的方位,以便小
2009-03-23 10:48:531843 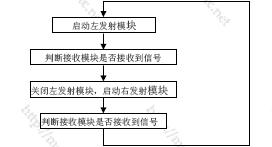
豐田公司推出的酷路澤越野車相信都是許多朋友中意的越野車,在此次CES展會(huì)便有這么一輛“大家伙”被展出。
2013-01-11 09:05:57772 現(xiàn)在,改裝廠Mansory也按耐不住推出了奔馳G級(jí)越野車的“土豪金”改裝方案,而且這套方案絕非圖有虛表,車輛的內(nèi)在動(dòng)力也經(jīng)過了大幅升級(jí)。
2016-12-26 16:23:141562 盡管國(guó)內(nèi)的小型SUV市場(chǎng)車型很豐富,國(guó)產(chǎn)和合資都是有不少車型選擇,但要選出那么一款合格的具有越野范的小型SUV是很難的,幾乎是沒有的,長(zhǎng)安CS35,本田XR-V算不上越野車,頂配的本田XR-V具備
2017-07-06 14:47:472647 這款越野的時(shí)候,覺得這款越野車盡管自主設(shè)計(jì)感很強(qiáng),但是還是能看到一些借鑒的影子,在外觀上看起來(lái)十分的魁梧霸氣,車燈采用的是獨(dú)立式設(shè)計(jì),車頭印有背景兩字,保險(xiǎn)杠十分寬大,與硬派的前臉為整部車的風(fēng)格墊定了一定的基礎(chǔ),
2017-07-17 14:24:496046 豐田蠻橫(prado,音譯普拉多)2700越野車是豐田陸地巡洋艦(land cruiser prado)系列中2.7L的最新款。這款全新開發(fā)的新一代suv車。豐田蠻橫2700配全新研發(fā)豐田四缸電噴2TR-FE發(fā)動(dòng)機(jī),排量2694cc,動(dòng)力性能好,排氣契合當(dāng)今全新國(guó)五號(hào)排放規(guī)范,高度環(huán)保。
2017-07-20 08:36:411668 今天小編我給我們介紹一款硬派越野SUV,并且這款SUV現(xiàn)在還只是以進(jìn)口形式在國(guó)內(nèi)銷售。提到越野二字,我想關(guān)于越野愛好者來(lái)說(shuō)能有一輛硬派越野車是多么驕傲的,由于越野車在野外可以降服各種雜亂路形,而這
2017-07-25 10:46:151386 碾子一側(cè)裝上了傳感器,而在操作室內(nèi)新增一部電子顯示屏。工程責(zé)任單位壹城市政公司工程部經(jīng)理朱明告訴記者,以往馬路壓得實(shí)不實(shí),只能靠工人的觀感。在壓路機(jī)運(yùn)行時(shí),壓路碾子在高頻震動(dòng)。而這套系統(tǒng)就可以像雷達(dá)一樣,通過偵測(cè)震動(dòng)地面后“反射”的回波,就可以準(zhǔn)確判斷道路有沒有壓實(shí)。
2018-07-26 15:39:00878 24 GHz雷達(dá)通過障礙物探測(cè)和測(cè)距提供安全性。
2018-06-04 03:47:003910 北 京時(shí)間12月4日上午消息,據(jù)外媒援引特斯拉內(nèi)部文件報(bào)道,該公司計(jì)劃加快推出規(guī)劃已久的小型越野車Model Y。
2018-12-05 15:09:39895 近日據(jù)了解,首臺(tái)覆蓋5G的巴士正式進(jìn)行測(cè)試階段,通過依靠5G網(wǎng)絡(luò)的傳輸讓巴士具備了高可靠性和低延時(shí)性,在車載激光雷達(dá)全方位探測(cè)、車載計(jì)算機(jī)人工智能算法等新技術(shù)支撐下,準(zhǔn)確繞過障礙物,自動(dòng)調(diào)整前進(jìn)速度。
2019-01-27 10:49:121014 圖片中顯示的某些材料用于制作刮的。但是,本教程將不介紹有關(guān)如何為越野車制造底盤或模型或如何將電線焊接至電動(dòng)機(jī)的過程。如果您愿意,這里是您需要的所有材料:
2019-09-30 10:39:132598 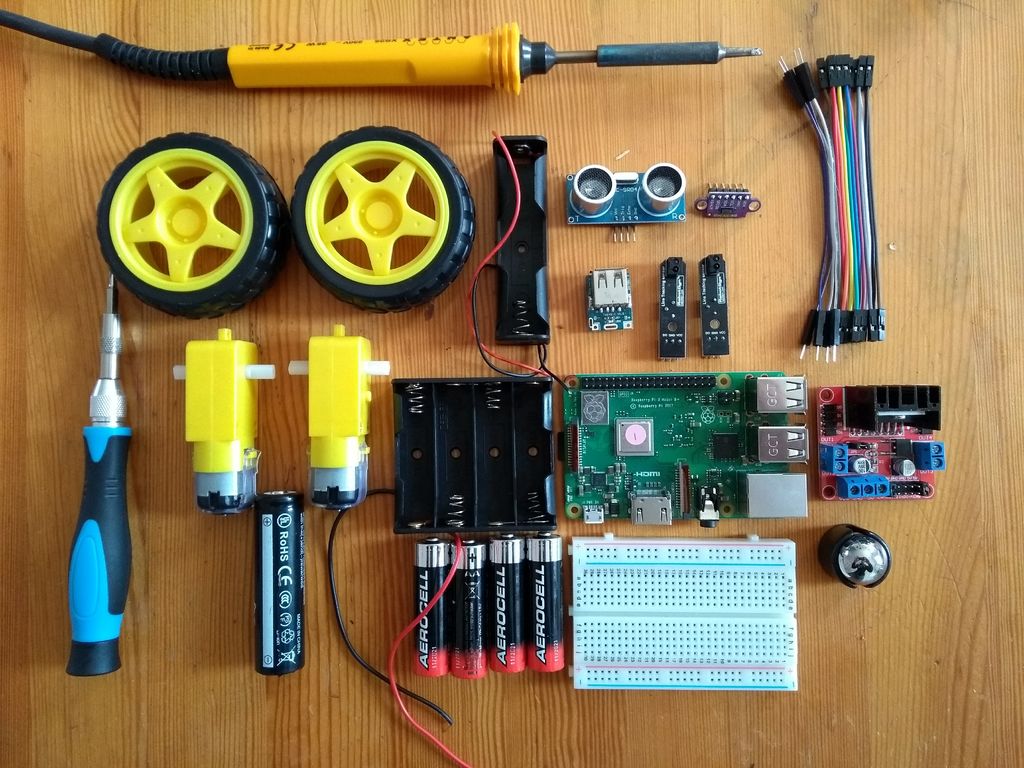
作為奔馳旗下油耗最高的車型,奔馳G級(jí)也是奔馳的標(biāo)志性經(jīng)典車型之一,Llenius表示,內(nèi)部已經(jīng)討論過了如何消除這一標(biāo)志性車型的標(biāo)志性大油耗——它將被電氣化。
2019-11-08 14:52:202652 電子發(fā)燒友網(wǎng)站提供《如何讓Arduino使用雷達(dá)避開障礙物.zip》資料免費(fèi)下載
2023-06-26 14:58:361
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論