 電子發燒友App
電子發燒友App


汽車電子是車體汽車電子控制裝置和車載汽車電子控制裝置的總稱。車體汽車電子控制裝置,包括發動機控制系統、底盤控制系統和車身電子控制系統(車身電子ECU)。汽車電子最重要的作用是提高汽車的安全性、舒適性、經濟性和娛樂性。用傳感器、微處理器MPU、執行器、數十甚至上百個電子元器件及其零部件組成的電控系統。
ABS防抱死系統
ABS即防抱死制動系統,是Anti—lock—Braking System的縮寫。司機們在駕車時都有體會,在濕滑路面、沙石路面或者高速過彎時,剎車絕對不能一腳踩死,而應分步剎車,一踩一松,否則,車輪容易發生抱死不轉動的情況,前輪抱死會引起汽車失去轉彎能力,后輪抱死容易發生甩尾事故等等。安裝ABS就是為解決剎車時車輪抱死這個問題,其工作原理也像上面所說的一踩一松,不過,ABS的工作頻率要比人的操控快得多。裝有ABS的汽車,能有效控制車輪保持在轉動狀態而不會抱死不轉,從而大大提高了剎車時汽車的穩定性及較差路面條件下的汽車制動性能。ABS是通過安裝在各車輪或傳動軸上的轉速傳感器等不斷檢測各車輪的轉速,由計算機計算出當時的車輪滑移率(由滑移率來了解汽車車輪是否已抱死),并與理想的滑移率相比較,做出增大或減小制動器制動壓力的決定,命令執行機構及時調整制動壓力,以保持車輪處于理想的制動狀態。因此,ABS裝置能夠使車輪始終維持在有微弱滑移的滾動狀態下制動,而不會抱死,達到提高制動效能的目的。
EBD電子制動力分配
EBD即電子制動力分配系統,EBD能夠根據由于汽車制動時產生軸荷轉移的不同,而自動調節前、后軸的制動力分配比例,提高制動效能,并配合ABS提高制動穩定性。汽車在制動時,四只輪胎附著的地面條件往往不一樣。比如,有時左前輪和右后輪附著在干燥的水泥地面上,而右前輪和左后輪卻附著在水中或泥水中,這種情況會導致在汽車制動時四只輪子與地面的摩擦力不一樣,制動時容易造成打滑、傾斜和車輛側翻事故。EBD用高速計算機在汽車制動的瞬間,分別對四只輪胎附著的不同地面進行感應、計算,得出不同的摩擦力數值,使四只輪胎的制動裝置根據不同的情況用不同的方式和力量制動,并在運動中不斷高速調整,從而保證車輛的平穩、安全。
TCS牽引力控制
TCS即牽引力控制系統,又稱循跡控制系統。汽車在光滑路面制動時,車輪會打滑,甚至使方向失控。同樣,汽車在起步或急加速時,驅動輪也有可能打滑,在冰雪等光滑路面上還會使方向失控而出危險。TCS就是針對此問題而設計的。TCS依靠電子傳感器探測到從動輪速度低于驅動輪時(這是打滑的特征),就會發出一個信號,調節點火時間、減小氣門開度、減小油門、降擋或制動車輪,從而使車輪不再打滑。TCS可以提高汽車行駛穩定性,提高加速性,提高爬坡能力。原來只是豪華轎車上才安裝TCS,現在許多普通轎車上也有。TCS如果和ABS相互配合使用,將進一步增強汽車的安全性能。TCS和ABS可共用車軸上的輪速傳感器,并與行車電腦連接,不斷監視各輪轉速,當在低速發現打滑時,TCS會立刻“通知”ABS動作來減低此車輪的打滑。若在高速發現打滑時,TCS立即向行車電腦發出指令,指揮發動機降速或變速器降擋,使打滑車輪不再打滑,防止車輛失控甩尾。
ESP電子穩定程序
ESP即電子穩定裝置,是Electronic Stablity Program的簡稱。ESP是由奔馳汽車公司首先應用在它的A級車上的,實際上也是一種牽引力控制系統。但是,與其他牽引力控制系統比較,ESP不但控制驅動輪,而且可控制從動輪。如后輪驅動汽車出現轉向過度時,ESP便會慢剎外側的前輪來穩定車子,防止后輪失控而發生甩尾現象;在轉向過小時,為了校正循跡方向,ESP則會剎慢內后輪,從而校正行駛方向。
GPS全球定位系統
GPS是GloblePositioningSystem的縮寫,意思為全球定位系統,它是由美國政府歷經20多年,耗資120億美金而實施的一項龐大的宇宙及航天工程。該系統可以在全球范圍內全天候地為地面目標提供信息,從而確定該目標在地面上的精確位置、速度、運行方面等參數。
最新汽車智駕電子技術
豐田“司機意識探索”
在洛杉磯車展上,豐田公司展示了一輛“司機意識探索”概念車,這款車由豐田與微軟研究院共同開發,后者利用微軟公司的Kinect 體感技術,將車與人之間的交互設計充分融入到汽車顯示系統中,將手勢控制、語音控制、遙控鑰匙相結合,司機能夠在駕車之前就獲得交通、天氣、預約等信息, 甚至會將路段中經過的加油站位置標記出來,通過遙控器能夠在車窗顯示屏上對出行途中的多項計劃任務進行規劃。豐田表示,將這些日常任務在司機進入汽車之前 就全部規劃完畢,那么司機就能更專注于駕車的過程。
斯巴魯新一代安全系統
斯巴魯 新一代EyeSight系統新增了方向盤自動控制功能和防止車輛偏離車道功能。在啟動跟蹤前方車輛的功能后,當車速超過65 千米/時時就自動控制方向盤,使車輛行駛于車道中央附近。不過,當推斷駕駛員未操作方向盤時則不啟動該功能。車輛偏離預警的功能是當車輛以超過65千米 /時的速度行駛在汽車專用道路時,如果出現跑出車道的苗頭,除了通過原來就有的圖示及聲音來提醒駕駛員注意之外,還會向方向盤施加扭矩,使車輛返回車道 內,這時無需啟動跟蹤功能。
善領科技最新行車記錄儀
善領科技今年發布了新一代行 車記錄儀產品善領VH5,該產品集合了導航、安全預警、免提通話、高清錄影、倒車輔助影像等當前駕駛常用功能,并采用了最新定制安卓系統,完美兼容當前安 卓市場上大部分實用APP以擴展善領VH5功能。材料上善領VH5采用了訂制24位防飛散顯示電容屏,在高強度撞擊時不會使屏幕飛出,更好的保護駕駛者安 全,并且使用德國進口拜爾材料作為固定外殼。
富士通無變形顯示的3D圖像技術
基 于富士通老的全景監控技術,新的全景技術首先在車輛周圍建立虛擬的三維場景,再利用激光雷達搜集到的距離信息,將攝像頭搜集到的圖像投射到三維場景中的相 應表面上。該系統需要準確地布置每臺攝像頭和雷達的位置和角度,目的在于,當僅靠一個攝像頭時,物體背面和側面位于盲區,但是該盲區可以通過其他攝像頭拍 到,通過整合,消除盲區。最后合成的圖像效果好于僅使用一個攝像頭和雷達的效果。
------------------------------
無線終端測試技術資料集錦——升級戰打響,智測無線終端靠什么?
基于繼電器MLX81150的車窗/天窗設計
汽車電動車窗和天窗主要由升降控制開關、電動機、升降機構和繼電器等組成,它是利用開關控制電動機的電流方向,實現車窗和天窗的升(關)降(開)。
車窗和天窗電動機都是雙向的,通過改變輸入電樞繞組的電流方向使電動機以不同的方向旋轉。每個車窗和天窗都有一個電動機,是一種不直接接地型電動機。所 有電動車窗都有兩套控制裝置如圖一所示,一套為總開關,可由駕駛員通過總控制開關操縱四個車窗的升降;另一套為分開關,分別裝在每個車窗中部,可由乘客操 縱身邊車窗的升降。總開關和分開關互不干涉,均可獨立控制。而天窗通過駕駛員操作開關遠程控制天窗的開關。
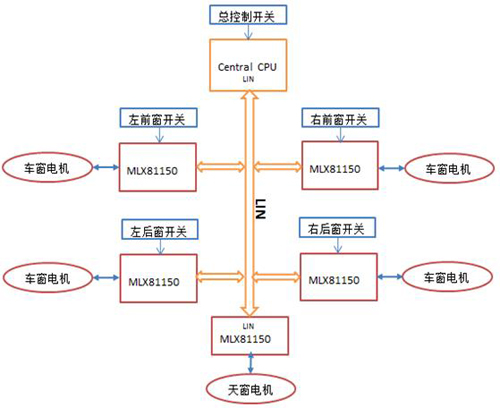
圖1、 車窗/天窗控制結構圖
汽車車窗和天窗是LIN總線的完美應用,尤其是駕駛員通過總控制開關操縱四個車窗的升降。當駕駛員操作車窗的開關時,中央ECU單元會通過LIN總線向對應的MXL81150發送指令,MXL81150接受到指令時會控制電機啟動實現車窗或天窗的升(關)降(開)。
圖2、 MCU與MLX81150通訊控制電機示意圖
MLX81150有2個獨立的、完全集成的繼電器驅動器,可用來驅動繼電器控制直流電機,操縱電機的正反轉實現車窗和天窗的升(關)降(開),如圖三所示。

圖3、 MLX81150繼電器驅動原理圖
MLX81150有四個功率FET柵極驅動器,可用來驅動全橋控制直流電機,操縱電機的正反轉實現車窗和天窗的升(關)降(開),如圖四所示。
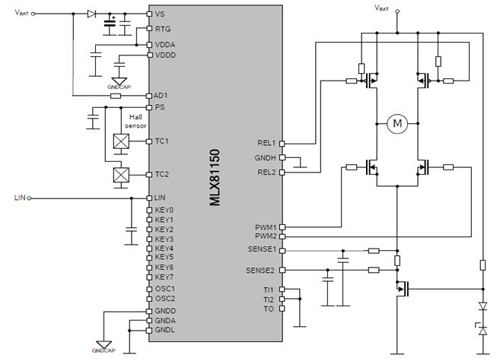
圖4、 MLX81150 全橋驅動原理圖
MXL81150主要性能:
? 集成有一個高性能16位嵌入式閃存微控制器,具有32K字節的閃存容量,可滿足一些特定的電機控制應用要求,內置的4位中央處理器則能夠完全處理LIN協議;
? 在小巧的封裝內集成了許多對于電機控制非常關鍵的外部元件,減少芯片外圍電路,減小PCB設計,降低了物料清單成本以及系統消耗的功率;
? 帶有一LIN通信接口,通過LIN接受指令,控制電機的啟動/停止,使得可以遠程通信控制車窗/天窗的升(關)降(開);
? 帶有兩個繼電驅動器和四個功率FET柵極驅動器,可以選擇驅動繼電器或全橋控制電機,通過PWM實現電機調速;
? 帶有一個用于連接霍爾傳感器的接口,通過霍爾傳感器確定車窗/天窗的位置;
? 帶有電流檢測接口,通過檢測電機運行電流的大小來實現防夾功能;
? 內部EEPROM用來存儲車窗和天窗的位置參數;
? 休眠時的工作電流僅30uA;
? 正常工作電壓范圍5.5V—18V,芯片工作電壓低至3.9V;28V的啟動條件,45V的過壓保護;
? 溫度范圍為-40℃ - 150℃;
詳細資料:MXL81150:具有MCU、PWM與LAN收發器的控制器
安森美汽車電控制解決方案
?
安森美半導體公司的NCV7471系統基礎芯片(SBC)集成了車體的汽車電控單元(ECU)的功能,提供和監視應用微控制器和其他負載的低壓電源,通過看門狗監視應用軟件,以及高速CAN和LIN收發器,使ECU成為多個通信節點或用作網關單元。
1.NCV7471 是一個系統基礎芯片
NCV7471 是一個系統基礎芯片(SBC),整合了汽車車身電子控制單元(ECU)的功能。NCV7471提供了(并監視)用于微控制器和其他負載的低電壓電源,并通過監視應用程序來監視軟件的運作。NCV7471還包括高速CAN和LIN收發器,可以使ECU承載多個通信節點,或充當網關單元。其片上狀態控制器,確保了安全的上電順序,并支持低功耗模式,還具有一些可配置的特性,包括通信總線喚醒或局部數字信號WU喚醒。NCV7471內部模塊的狀態可以通過串行外設接口,由微控制器進行讀取,或被用來產生中斷請求。
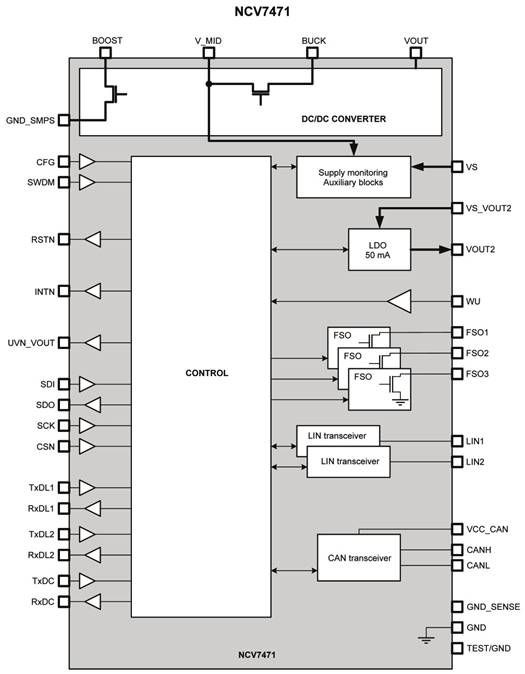
圖1 NCV7471框圖
NCV7471主要特性
?控制邏輯
- 確保安全的上電順序,不同供電條件的正確反應
- 控制模式轉換,包括電源管理、喚醒處理總線喚醒、局部喚醒(通過WU引腳)、和環喚醒(通過片內定時器)
- 生成復位和中斷請求
?串行外設接口
- 運行16bit的幀
- 確保與ECU微控制器單元的通信
- 模式設置,芯片狀態反饋和通過八個12位寄存器進行監督
- 最高可提供500mA的電流達到2% 的精度
- 一般用于ECU微控制器
- 適用于啟動停止系統,最低電池電壓2.5V
? 5V VOUT2 低壓差輸出穩壓器
- 可提供外部載荷,如傳感器
-通過SPI和狀態機控制
- 防汽車電瓶短路保護
?一個高速CAN收發器
- ISO11898標準
- TxD主導的超時保護
?兩個LIN收發器
- LIN2.1和J2602標準
?喚醒輸入WU
-邊沿觸發高電壓輸入
- 可以用作喚醒源或通過SPI作為邏輯輸入
?保護和監視功能
- 通過V_MID點,監測主電源
- 通過可編程的閾值,監測VOUT電源輸出
- 通過SPI 和中斷,診斷VOUT2電源
- 熱警告和熱關斷保護
- 可編程看門狗監測ECU軟件
?汽車車身控制模塊

NCV7471應用框圖
2.NCV7471系統基礎芯片評估板
文檔介紹了安森美半導體公司的NCV7471系統基礎芯片(具有高速CAN、兩個LIN收發器、升壓-降壓轉換器和低壓降穩壓器)。NCV7471 EVB板可以對其功能及主要參數進行評估。
NCV7471系統基礎芯片評估板主要特性
?單排針接頭,提供了電路的信號,可以使評估板很容易插入到更復雜的應用程序
?主(電池)電源的反向保護和去耦
?具有所有必要的VOUT轉換器外部元件-裝配可選項
? VOUT上的解耦轉換器,和VOUT2調節器輸出
?漏極開路數字輸出的額外上拉電阻(RSTN,INTN,UVN_VOUT)
?開關-監測喚醒輸入的濾波電路
?板載本地喚醒開關
? CAN/LIN總線終端
?電路的裸露焊盤到底盤的,良好的熱連接
?使用的軟件開發模式的基本獨立功能
1.概述
飛思卡爾與同濟大學聯合推出采用 MagniV S12VR MCU的面向汽車車窗玻璃升降系統的參考設計。 這個防夾車窗玻璃升降器參考設計展示了其在汽車設計中的功能,是電動車窗和遮陽板系統開發的理想之選。 該參考設計還包括真正的車門/窗應用所用的硬件,以及防夾算法和低級別S12VR驅動程序等軟件。
這款參考設計利用了MagniV S12VR MCU獨特的功能,旨在縮短產品上市時間。除了幫助減少不必要的外部元件,該參考設計還降低了總物料成本(BOM),提高了系統的質量,并通過采用更小的PCB節省了汽車應用的空間。
2.參考設計特性
1)車窗手動/自動上升/下降,通過停止功能自動上升/下降
2)手動/自動模式防夾,防夾區域和力度可調節。
3)防夾區域外的卡殼檢測,電機過載保護
4)車窗接近頂部/底部時軟停止
5)故障診斷,指示低電壓、過電壓/過電流/高溫等。
6)低功耗模式(利用S12VR低功耗模式),以降低功耗
7)自學習,通過更新存儲在EEPROM中的車窗/電機參數進行校準
8)使用霍爾傳感器以及電流檢測通過算法來判斷防夾
9)易于控制的圖形用戶界面(GUI),可設置參數,獲取狀態信息
10)車窗玻璃升降器可以由多個LIN從節點或LIN主節點控制(通過GUI)
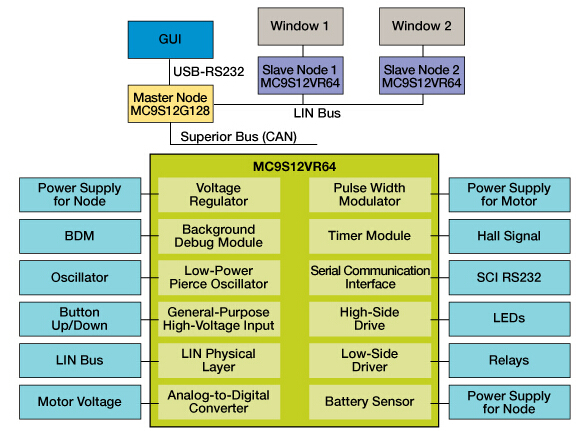
防夾升降車窗參考平臺框圖
3.支持器件
S12VR: 面向繼電器驅動的電機應用的S12 MagniV混合信號MCU
S12VR系列將NVM、數字邏輯電路和高電壓模擬組件組合成一個單芯片解決方案。這些模擬組件包括一個汽車穩壓器、LIN物理層、低邊驅動、高邊驅動 和輸入。新的高電壓器件都能夠承受汽車環境的嚴格要求(高達40V,這種情況在負載突降時會出現),這些器件與業界公認的16位S12 CPU和存儲器子系統(包含受ECC保護的閃存和真實的EEPROM)集成在一起。S12 CPU與高性價比、高度集成的S12G系列MCU完全兼容。S12VR中的數字外設,如SPI、SCI串行模塊、PWM和定時器模塊等也具有兼容性。
S12VR 集成了一個系統中的所有元件,節省了寶貴的PCB空間,簡化了設計,提高了系統的整體質量,降低了成本。更小的PCB意味著更小的機箱,在汽車應用中減去 一點點重量都會提高燃油效率。S12VR上可集成不同的組件,縮短了獲得一個完整解決方案所需要的開發時間,從而大大加快了產品上市速度。帶集成LIN- PHY的S12VR系列通過了主要汽車原始設備制造商的審核,滿足LIN規范和EMC要求,現在還支持高達125°C的環境溫度。
特性
1)S12 CPU內核,25 MHz總線
2)帶有ECC功能的64 KB閃存
3)帶有ECC功能的512 字節EEPROM
4)2 KB片上SRAM
5)LIN物理層
6)穩壓器
7)兩個低邊驅動器,驅動感應負載
8)最多兩個高邊驅動器
9)4個高電壓輸入
S12VR結構框圖
Freescale MC33813小型發動器控制方案
Freescale公司的MC33813是一種發動機控制模擬電源集成電路,包括5個集成低邊驅動器,兩個預驅動器,一個VSR(可變磁阻傳感器) 輸入電路,一個采用外部傳輸晶體管的前置穩壓器,以及兩個5.0V內部穩壓器,其中一個用于(MCU) VCC供電,另一個用作受保護的傳感器電源,主要用在汽車電子,摩托車發動機控制單元(ECU)和小型發動機控制和直噴發動機。本文介紹了MC33813 主要特性,框圖,應用電路,以及KIT33813AEEVBE評估板(EVB)主要特性,框圖,電路圖,材料清單等。
1.MC33813一種發動機控制模擬電源集成電路
MC33813 是一種發動機控制模擬電源集成電路,適用于單缸摩托車及其他小型發動機控制應用。IC包括5個集成低邊驅動器,兩個預驅動器,一個VSR(可變磁阻傳感器)輸入電路,一個采用外部傳輸晶體管的前置穩壓器,以及兩個5.0V內部穩壓器,其中一個用于(MCU) VCC供電,另一個用作受保護的傳感器電源。此外,還包括帶看門狗的MCU復位控制電路、用于診斷通信的ISO 9141 K線接口以及一個SPI (串行外設接口)。5個低邊驅動器,用于驅動一個噴油器,一個燈泡,兩個繼電器或者其他負載和一個轉速表。預驅動器用于驅動IGBT或MOSFET晶體管來控制點火線圈和/或一個HEGO加熱器。這兩款器件采用48引腳LQFP封裝,帶裸焊盤。
MC33813主要特性:
設計的工作電壓范圍為4.5 V ≤ VPWR ≤ 36 V
確保邏輯穩定性的最低電壓為2.5 V
一個噴油器-典型值 1.3 A
一個點火IGBT或通用門控預驅動器
一個O2傳感器(HEGO)加熱器,通用門控預驅動器
繼電器1驅動器,典型值2.0 A,用于燃油泵控制
繼電器2驅動器,典型值1.0 A,用于電源繼電器控制
燈泡驅動器,典型值1.0 A,也可用于驅動一個LED
VPROT受保護的傳感器電源,跟蹤VCC +5.0 V 穩壓器
MCU復位生成器-系統完整性監控器(看門狗)
VPP前置穩壓器,為VCC和VPROT穩壓器供電
獨立的故障保護,所有故障通過SPI報告
ISO 9141 K-Line接口,用于傳送診斷信息
啟動/關閉控制和上電時序邏輯,實現電源控制
使用一個5.0 V SPI和邏輯I/O可直接與MCU連接
帶有自動/手動選擇閾值和濾波器時間的差分/單端VRS可調節電路,帶有數字和轉速輸出
鑰匙開關邏輯,用于設置功率繼電器和MCU控制的關斷。

圖1.MC33813功能框圖
圖2.MC33813簡化應用電路圖
2.KIT33813AEEVBE評估板(EVB)
KIT33813AEEVBE 評估板(EVB)是一款易用的電路板,可讓用戶練習使用MC33813單缸小型發動器控制IC的所有功能。 PC通過連接到其USB端口的USB/SPI Dongle (KITUSBSPIDGLEVME)來與該EVB通信。飛思卡爾SPIGen (版本6.0)程序針對MC33813 SPI (串行外設接口)提供用戶界面,可讓用戶向IC發送命令以及從IC接收狀態信息。
圖3.KIT33813AEEVBE評估板(EVB)外形圖
圖4.KIT33813AEEVBE評估板(EVB)和KITUSBSPIDGLEVME板建立圖

圖5.KIT33813AEEVBE評估板(EVB)框圖
3.MC33813目標應用:
汽車電子
摩托車發動機控制單元(ECU)和小型發動機控制
直噴發動機
汽車光控制模塊參考設計
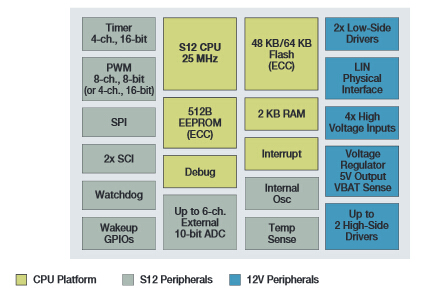
Freescale公司的Kinetis KEA128系列產品是基于ARM Cortex-M0+內核的MCU,工作頻率48MHz,單周期32位x32位乘法器,多達128KB閃存、256B EEPROM和16KB RAM,工作電壓2.7V~5.5V,閃存寫電壓2.7V~5.5V,工作溫度–40℃~+125℃。主要用在汽車娛樂連接模塊、DC/BLDC馬達控制、TPMS、電動摩托車CDI/EFI、電池管理、泵/風扇控制、窗/門/天窗控制、BCM/HVAC和座位/雨刷控制等。
1.Kinetis KEA128系列MCU
車用型Kinetis EA系列MCU,提供了高性價比的,ARM為基礎的解決方案,可以廣泛地用于汽車領域,并與KinetisEA系列及未來的Kinetis汽車系列引腳兼容。
這一系列包括一組模擬、通信、定時和控制外設,以及不同的閃存容量和引腳數。這些可擴展的設備非常強勁,并提供了增強的ESD/ EMC性能的解決方案,用于成本敏感的汽車領域。該系列具有開發工具、軟件、和硬件參考的支持,快速啟動設計。

圖1 Kinetis KEA128系列MCU框圖
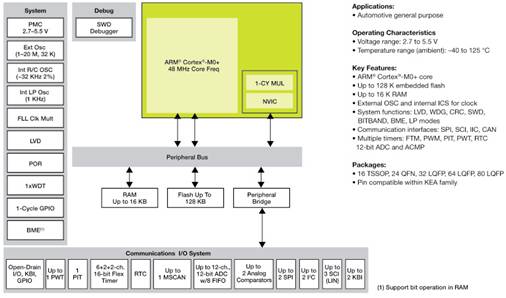
圖2 KEA128LEDLIGHTRD光控制模塊參考設計框圖
Kinetis KEA128主要特性
?工作特性
-電壓范圍:2.7V~5.5V,
-閃存的寫入電壓范圍:2.7V~5.5V,
-溫度范圍(環境):-40℃~+125℃
?性能
-最高48MHz的ARM Cortex-M0+核
-單周期32位×32位乘法器
-單周期訪問I/O端口
?存儲器和存儲器接口
-最高128KB的閃存
-最高256B的EEPROM
-最高16KB的RAM
?時鐘
-振蕩器(OSC)-loop控制皮爾斯振蕩器,晶體或陶瓷諧振器系列31.25kHz~39.0625kHz或4MHz~24MHz
-內部時鐘源(ICS)-內部FLL具有內部或外部參考,內部參考精確微調,允許-30℃~85℃溫度范圍1%的偏差和-40℃~125℃的溫度范圍,1.5%的偏差,最高48MHz
-內部1kHz低功耗振蕩器(LPO)
?系統外設
-電源管理模塊(PMC)與三種功率 模式:運行、等待、停止
-低電壓檢測(LVD)復位或中斷,可選擇的觸發點
-看門狗具有獨立的時鐘源(WDOG)
-可編程循環冗余校驗模塊(CRC)
-串行線調試接口(SWD)
-位操作引擎(BME)
?安全性和完整性模塊
- 80位的唯一的標識(ID)碼(每片)
?人機界面(HMI)
-最多71個通用輸入/輸出(GPIO)
-最多兩個32位鍵盤中斷模塊(KBI)
-外部中斷(IRQ)
?模擬模塊
-一個12位,最多16通道SAR ADC,具有內部帶隙參考通道,停止模式下可運行,可選的硬件觸發(ADC)
-兩個模擬比較器,包含一個6位DAC和可編程參考輸入(ACMP)
?計時器
-一個6通道FlexTimer/脈寬調制器(FTM)
-最多兩個雙通道FlexTimer/脈寬調制器(FTM)
-一個2通道周期中斷定時器(PIT)
-一個實時時鐘(RTC)
-最多1個16位脈沖寬度定時器
2.Kinetis KEA128目標應用:
信息娛樂系統連接模塊、公園援助、直流/直流無刷電機控制、電子駐車制動、TPMS、摩托車點火/電噴、電池管理、泵/風扇控制器、被動入口始推、環境照明、BCM/暖通空調、窗/門/天窗、座椅/后視鏡/雨刮器、防盜、動力總成配套芯片、通用傳感器節點。
?
3.KEA128LEDLIGHTRD光控制模塊參考設計
KEA128LEDLIGHTRD 光控模塊參考設計,基于Kinetis EA MCU和E-開關(MC10XS3425)。照明控制參考設計是建立在Kinetis KEA128 32-bit ARM Cortex-M0+ automotive-grade MCU上。其整體硬件解決方案,包括,Kinetis KEA128 MCU、MC10XS3425EK、四高邊驅動芯片MC33901 CAN收發器和MC33662 LIN收發器芯片。這包括LIN和CAN以通信為基礎的,完整的大燈環境控制解決方案,包括LED燈、尾燈、轉向燈、燈電流控制和診斷。硬件板卡已上市,可用于評估這個解決方案,它包括SWD連接器接口,用于調試SW。此外,還具有照明連接器接口,以提高該解決方案控制燈的數量。
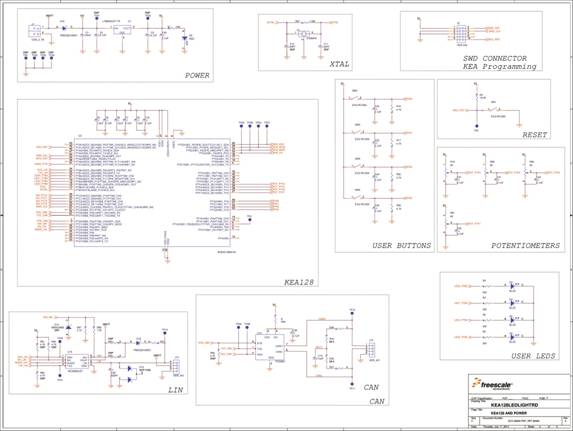
圖3 KEA128LEDLIGHTRD光控制模塊參考設計電路圖
光控制模塊參考設計主要特性
? 32位KEA128MCU,64引腳LQFP封裝
? MC33662 LIN收發器
? MC33901 CAN收發器
? MC10XS3425EK多芯片高邊開關
? 4個LED
? 4個電位器
? 4個用戶按鈕
? SWD連接器接口,用于調試
?光連接器接口
KEA128LEDLIGHTRD光控制模塊參考設計包括:
? Kinetis KEA128LEDLIGHTRD板
? DVD
------------------------------
無線終端測試技術資料集錦——升級戰打響,智測無線終端靠什么?









 工商網監
工商網監
評論