 電子發(fā)燒友App
電子發(fā)燒友App


自動(dòng)駕駛競賽進(jìn)入下半場,推進(jìn)商業(yè)化應(yīng)用成為各企業(yè)發(fā)力的重點(diǎn)。根據(jù)美國蘭德公司的研究,自動(dòng)駕駛算法想要達(dá)到人類駕駛員水平至少需要累計(jì)177億公里的駕駛數(shù)據(jù)來完善算法。
如果配置一支100輛自動(dòng)駕駛測試車的車隊(duì),每天24小時(shí)不停歇路測,平均時(shí)速25英里(40公里)每小時(shí)來計(jì)算,需要500多年的時(shí)間才能完成目標(biāo)里程,期間所耗費(fèi)的時(shí)間和成本無疑難以承受。
利用仿真技術(shù)進(jìn)行測試,被認(rèn)為是降低成本、提升效率關(guān)鍵。目前,仿真測試在自動(dòng)駕駛領(lǐng)域的發(fā)展如何?10月12日,中國電動(dòng)汽車百人會(huì)、騰訊自動(dòng)駕駛、中汽數(shù)據(jù)有限公司聯(lián)合發(fā)布了《2020中國自動(dòng)駕駛仿真藍(lán)皮書》,詳細(xì)介紹了技術(shù)應(yīng)用現(xiàn)狀及挑戰(zhàn)。
趨勢:未來或有99.9%測試?yán)梅抡嫫脚_(tái)
基于場景庫的仿真測試是解決自動(dòng)駕駛路測數(shù)據(jù)匱乏的重要路線。仿真測試主要通過構(gòu)建虛擬場景庫,實(shí)現(xiàn)自動(dòng)駕駛感知、決策規(guī)劃、控制等算法的閉環(huán)仿真測試,滿足自動(dòng)駕駛測試的要求。
場景庫是自動(dòng)駕駛仿真測試的基礎(chǔ),場景庫對(duì)現(xiàn)實(shí)世界的覆蓋率越高,仿真測試結(jié)果越真實(shí)。自動(dòng)駕駛汽車研發(fā)的不同階段對(duì)于場景庫的要求也不同,需要場景庫實(shí)現(xiàn)不同的測試功能。
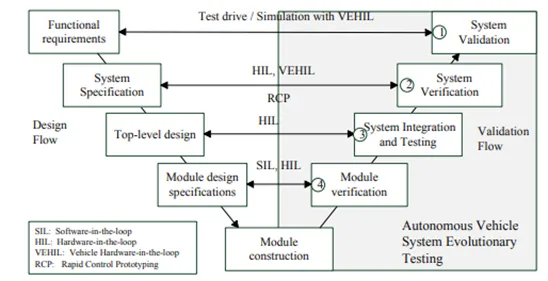
在自動(dòng)駕駛的開發(fā)流程中,純模型仿真—軟件在環(huán)仿真—半實(shí)物仿真—封閉場地道路測試—開放道路測試的開發(fā)流程是最經(jīng)濟(jì)、高效的開發(fā)流程。
目前,自動(dòng)駕駛仿真已經(jīng)被行業(yè)廣泛接受。例如美國自動(dòng)駕駛領(lǐng)軍企業(yè)Waymo旗下的仿真平臺(tái)Carcraft每天在虛擬道路上行駛約2000萬英里,相當(dāng)于在真實(shí)世界中行駛10年。截止2020年5月,Waymo已經(jīng)模擬行駛了150億英里,相比之下,去年6月的數(shù)據(jù)是100億英里。
除Waymo外,通用旗下的Cruise、AutoX、小馬智行等國內(nèi)外自動(dòng)駕駛解決方案商也在進(jìn)行大量的仿真測試,以完善自己的自動(dòng)駕駛系統(tǒng),仿真測試已經(jīng)成為自動(dòng)駕駛商用最重要的測試。
目前的數(shù)據(jù)來看,自動(dòng)駕駛算法測試大約90%通過仿真平臺(tái)完成,9%在測試場完成,1%通過實(shí)際路測完成。隨著仿真技術(shù)水平的提高和應(yīng)用的普及,行業(yè)希望通過仿真平臺(tái)完成99.9%的測試量,封閉場地測試完成0.09%,最后0.01%到實(shí)路上去完成。這樣,自動(dòng)駕駛汽車研發(fā)將達(dá)到更高效、經(jīng)濟(jì)的狀態(tài)。
現(xiàn)狀:各賽道參與者積極布局
目前自動(dòng)駕駛仿真市場參與主體主要包括:科技公司、車企、自動(dòng)駕駛解決方案商、仿真軟件企業(yè)、高校及科研機(jī)構(gòu)、智能網(wǎng)聯(lián)測試示范區(qū)。由于每個(gè)市場主體在自動(dòng)駕駛仿真方面的技術(shù)基礎(chǔ)不同,因此在推動(dòng)自動(dòng)駕駛仿真方面的研發(fā)及合作方式呈現(xiàn)不同模式。
科技公司在仿真方面起步相對(duì)較晚,在汽車功能探索方面經(jīng)驗(yàn)較少,但是具備大數(shù)據(jù)優(yōu)勢,軟件開發(fā)能力強(qiáng)。
自動(dòng)駕駛汽車相比傳統(tǒng)汽車,對(duì)軟件的需求更大,科技公司進(jìn)行仿真軟件的探索,目的是進(jìn)入市場龐大的汽車行業(yè),建立更大的數(shù)據(jù)平臺(tái),形成新的業(yè)務(wù)增長點(diǎn)。目前自動(dòng)駕駛仿真科技公司主要包括騰訊、百度、華為、阿里等。
微軟、英偉達(dá)及LG等國外科技公司主要針對(duì)自動(dòng)駕駛仿真軟件進(jìn)行研發(fā),通過和產(chǎn)業(yè)鏈企業(yè)合作建立了自動(dòng)駕駛研發(fā)生態(tài)體系,成為自動(dòng)駕駛仿真的重要參與者。
對(duì)于整車企業(yè)來講,路測和仿真測試同步進(jìn)行是最佳選擇,而自動(dòng)駕駛汽車在真正實(shí)現(xiàn)落地之前,需經(jīng)過眾多功能與安全測試,路測就是其中一環(huán)。由于路測效率較低,目前很多車企都傾向于選擇自動(dòng)駕駛仿真測試與路測相結(jié)合的方式來完成落地前的測試工作。
自動(dòng)駕駛解決方案商主要針對(duì)自身需求研發(fā)定制化仿真軟件,較少對(duì)外提供仿真服務(wù),但借助于充足的資金、人才集聚力及自身研發(fā)驅(qū)動(dòng)力,在自動(dòng)駕駛仿真方面具有很強(qiáng)的創(chuàng)新能力。各領(lǐng)先自動(dòng)駕駛解決方案商都有自身仿真測試軟件,如Waymo、Cruise、小馬智行、AutoX等。
仿真軟件企業(yè)可分為傳統(tǒng)仿真軟件企業(yè)、初創(chuàng)企業(yè)兩大類。傳統(tǒng)仿真軟件企業(yè)由于技術(shù)積累比較深厚,進(jìn)入自動(dòng)駕駛仿真具有先天優(yōu)勢,而且合作伙伴較多,二次開發(fā)具有優(yōu)勢。初創(chuàng)企業(yè)由于起步晚,技術(shù)積累較弱,國內(nèi)企業(yè)和國外的差距較大,但依靠雄厚的資金和人才集聚力,創(chuàng)業(yè)公司在自動(dòng)駕駛仿真軟件研發(fā)方面有望迅速崛起。
高校及科研機(jī)構(gòu)主要應(yīng)用自動(dòng)駕駛仿真軟件進(jìn)行前瞻性、基礎(chǔ)性研究,但很難形成成熟的商業(yè)化產(chǎn)品。國內(nèi)從事自動(dòng)駕駛仿真研究的高校及科研機(jī)構(gòu)主要包括:清華大學(xué)、同濟(jì)大學(xué)、北京航空航天大學(xué)、吉林大學(xué)、天津大學(xué)、長安大學(xué)、南京航空航天大學(xué)、武漢理工大學(xué)等。
智能網(wǎng)聯(lián)測試示范區(qū)建設(shè)已形成一定規(guī)模。目前全國有10余家國家級(jí)和數(shù)家省級(jí)智能網(wǎng)聯(lián)測試示范區(qū),主要通過對(duì)5G、V2X車路協(xié)同、模擬仿真、車聯(lián)網(wǎng)等新技術(shù)的部署和應(yīng)用,為自動(dòng)駕駛、網(wǎng)聯(lián)通信供應(yīng)商等提供系統(tǒng)測試服務(wù),推動(dòng)汽車、信息通信、道路設(shè)施等內(nèi)容的綜合標(biāo)準(zhǔn)體系的建立。為推動(dòng)智能網(wǎng)聯(lián)汽車的仿真測試工作,已有企業(yè)和智能網(wǎng)聯(lián)示范區(qū)開展了路測與虛擬仿真相結(jié)合的測試。
挑戰(zhàn):測試評(píng)價(jià)體系缺乏規(guī)范
目前自動(dòng)駕駛仿真測試已初步形成完整的產(chǎn)業(yè)鏈體系,形成了科技公司、自動(dòng)駕駛解決方案商、仿真軟件企業(yè)為主的上游仿真軟件提供商,以車企、自動(dòng)駕駛測試機(jī)構(gòu)為主的仿真軟件下游應(yīng)用商。從產(chǎn)業(yè)鏈角度分析,目前自動(dòng)駕駛仿真測試還存在諸多問題。
一方面,仿真場景庫建設(shè)與合作機(jī)制有待完善。
場景庫建設(shè)效率低、費(fèi)用高。目前場景庫建設(shè)還需要依靠大量人工進(jìn)行采集、標(biāo)注,然后進(jìn)行場景分析挖掘、測試驗(yàn)證,整個(gè)流程效率低、成本高,目前全球每年人工標(biāo)注成本在10億美元量級(jí)。
場景庫規(guī)模不夠大,多樣性、覆蓋性、可擴(kuò)展性不強(qiáng)。現(xiàn)有場景庫不足以覆蓋常見交通場景,在有限的資源投入情況下,還不能有效覆蓋真實(shí)世界的多樣性。由于場景中不同要素的改變均可以擴(kuò)展為不同的場景,目前場景擴(kuò)展性還不足以滿足仿真測試的要求。
場景有效性有待提高。現(xiàn)有場景是按實(shí)時(shí)數(shù)據(jù)采集,無法滿足自動(dòng)駕駛場景動(dòng)態(tài)變化的要求。在場景中,人、車、路、行駛環(huán)境等動(dòng)態(tài)和靜態(tài)要素耦合,一個(gè)要素的變化將引起其他要素的改變,而且不同交通參與者均有自己的行為邏輯。例如改變車輛行為和軌跡,周邊車輛和行人的行為也將隨之改變。
場景數(shù)據(jù)的采集格式和存儲(chǔ)問題。現(xiàn)有的測試場景采集,是基于不同的車輛和傳感器配置,無法適用于各類車型及技術(shù)路線的研發(fā)與測試,高精度地圖的格式也是行業(yè)關(guān)注的重點(diǎn)。場景庫的數(shù)據(jù)格式如系統(tǒng)架構(gòu)、數(shù)據(jù)接口、數(shù)據(jù)庫管理系統(tǒng)等統(tǒng)一也是需要重點(diǎn)關(guān)注的問題。
測試場景中的測試真值及評(píng)估體系。測試場景數(shù)據(jù)采集需考慮采集要求、采集方法、數(shù)據(jù)預(yù)處理、數(shù)據(jù)傳輸存儲(chǔ)、采集數(shù)量、采集精度、時(shí)間同步性、采集范圍、采集完整性等各方面的因素,任何一個(gè)因素的欠缺都將導(dǎo)致場景的真實(shí)性及有效性。而且針對(duì)不同場景下自動(dòng)駕駛測試車輛的測評(píng)指標(biāo)體系尚不完善。
場景庫建立缺乏合作,資源重復(fù)性投入大。目前單一企業(yè)很難完成覆蓋所有場景的場景庫建設(shè)。當(dāng)下各企業(yè)場景庫建設(shè)都是各自為戰(zhàn),導(dǎo)致資源重復(fù)性投入,企業(yè)之間缺乏場景庫建設(shè)合作。尤其是自然駕駛場景、標(biāo)準(zhǔn)法規(guī)場景等共性場景可以通過合作共建,實(shí)現(xiàn)使用共享,目前這方面的合作還很少。
另一方面,自動(dòng)駕駛仿真測試評(píng)價(jià)體系缺乏規(guī)范。
在自動(dòng)駕駛仿真測試方面,由于不同仿真軟件系統(tǒng)架構(gòu)及場景庫構(gòu)建方法的不同,導(dǎo)致很難建立統(tǒng)一規(guī)范的仿真測試評(píng)價(jià)體系。目前國內(nèi)仿真評(píng)價(jià)體系的研究方向主要是從駕駛安全性、舒適性、交通協(xié)調(diào)性、標(biāo)準(zhǔn)匹配性等方面評(píng)價(jià)自動(dòng)駕駛車輛仿真測試結(jié)果,對(duì)于仿真軟件自身的評(píng)價(jià)缺乏統(tǒng)一的評(píng)價(jià)標(biāo)準(zhǔn),如仿真軟件場景真實(shí)度、場景覆蓋度、仿真效率等。
自動(dòng)駕駛汽車作為智能化產(chǎn)品,未來需要應(yīng)用深度學(xué)習(xí)算法使汽車具備自我學(xué)習(xí)能力,如道路障礙物的復(fù)述重現(xiàn)能力、場景的泛化遷移能力,因此自我學(xué)習(xí)進(jìn)化性也是自動(dòng)駕駛汽車的評(píng)價(jià)指標(biāo),目前自動(dòng)駕駛汽車的學(xué)習(xí)進(jìn)化性還缺乏相應(yīng)的評(píng)價(jià)規(guī)范。
總結(jié):
自動(dòng)駕駛技術(shù)演化有兩條路線,分別是由L2級(jí)到L3級(jí)和L4級(jí)到L5級(jí),前者是車企的普通走的路線,后者往往是科技公司的選擇,兩者的主要代表分別是特斯拉和Waymo。今年以來,多家企業(yè)表示,已具備L3級(jí)自動(dòng)駕駛車輛量產(chǎn)能力;科技企業(yè)也紛紛展開Robotaxi的商業(yè)化運(yùn)營測試。可以看出,各股競爭勢力都在試圖搶先落地應(yīng)用自動(dòng)駕駛技術(shù)。誰能在競賽中拔得頭籌?成本和效率無疑是最關(guān)鍵因素,仿真測試的成熟應(yīng)用或?qū)⒊蔀殛P(guān)鍵。
? ? ? ?責(zé)任編輯:tzh











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論