過壓斬波電路是一種用于保護電子設備免受過電壓損害的電路。它主要由三大部分組成,包括過壓檢測電路、觸發控制電路和繼電器控制電路。 第一部分:過壓檢測電路 過壓檢測電路是過壓斬波電路的核心部分,它負責
2024-03-21 17:24:48 151
151 精密空調主要由制冷系統、空氣循環系統、控制系統三大部分組成。
2024-03-03 17:28:45848 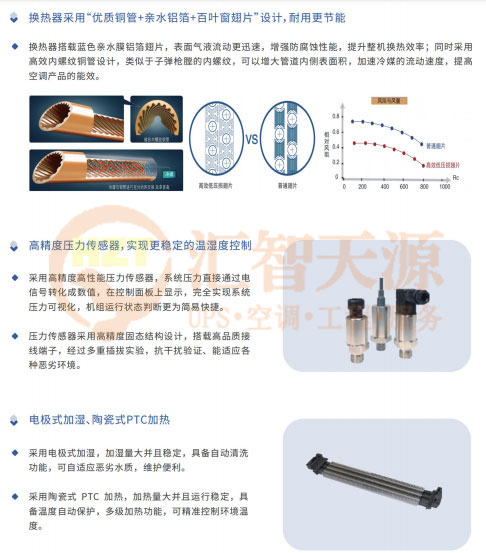
方式通過非常狹窄的通道。由于身體的柔軟性,軟體機器人接觸尖銳的物體后還不會受到傷害,這一特性使得它們能夠進入人體進行藥物運輸,或者作為醫療手術中的操作員進行臨床手術。實際上,柔性驅動器已經作為操縱器被
2024-02-27 17:15:22
焊接機器人工作站是現代工業自動化生產中的重要組成部分,它通過將機器人與先進的焊接技術相結合,提高了生產效率、質量和安全性。一個典型的焊接機器人工作站由多個部分組成,每個部分都有著獨特的功能,共同協作
2024-01-30 15:21:2899 Linux內核主要由以下幾個部分組成: 進程管理:Linux內核負責管理和調度系統中的進程。它通過進程調度算法來決定哪個進程在什么時間運行以及如何分配系統資源。 內存管理:Linux內核負責管理系統
2024-01-22 14:34:43636 變頻器是一種電力控制設備,它利用電力電子技術來改變電機的工作電源頻率,從而控制電機的不同轉速。變頻器主要由整流電路、緩沖電路、濾波電路和逆變電路等部分組成。本文將詳細介紹變頻器的主要組成部分及其功能
2024-01-11 15:58:55905 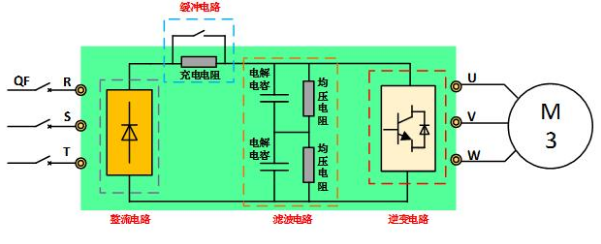
廣泛應用于世界各地的醫療機構。達芬奇手術機器人結合了高精度的機械手臂、先進的影像系統和精確的控制系統,為外科醫生提供了更精確、更穩定的手術操作平臺。 達芬奇手術機器人在許多不同的醫療領域中都有著廣泛的應用。以下是其中一些主要領域的詳細介紹: 泌尿系
2024-01-11 09:16:52279 LabVIEW數據采集系統由以下五個主要部分組成:硬件、傳感器、信號調理器、數據采集卡和LabVIEW軟件。 一、硬件部分: 硬件是數據采集系統的基礎,通常包括計算機、處理器、存儲器、顯示設備
2024-01-02 13:53:09331 移動機器人到底是由哪些部分組成的呢,接下來我們就一起認識一下它。
2024-01-02 09:49:38403 
工業機器人需要依靠各種傳感器來獲取周圍環境的信息,以便進行正確的定位、導航和避障等任務。
2023-12-29 10:55:44336 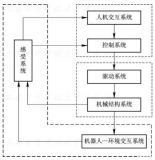
Emo是一款基于樹莓派4做的個人伴侶機器人,集時尚與創新于一身。它不僅僅是一款機器人,更是一個活生生的存在,與其他機器人不同,它擁有獨特的個性和情感。
硬件部分
樹莓派 4B
微雪 2 英寸
2023-12-26 15:18:26
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
更上一層樓。
硬件設計
本項目中的自平衡賽車機器人的硬件設計結構非常簡單,硬件部分主要由R128開發板和幾個驅動模塊組成。
供電模塊
自平衡機器人采用鋰電池供電的方式,并利用mini360航模電池降壓
2023-12-20 10:22:18
。早期,手機機器人在骨科、牙科等細分領域已經得到較多應用,如今在大模型的加持下,手術機器人在腦科也取得突破。 ? 手術機器人已在多個細分領域廣泛應用 ? 達芬奇機器人是一個很典型的例子。達芬奇機器人手術系統主要由控
2023-12-16 01:02:561616 大大提高了工作效率,也極大地提升了實驗精度。自動移液機器人是一種能夠代替人工進行精確液體操作的自動化設備。它通過精密的機械結構和先進的控制系統,實現了對微小液體體積的準
2023-12-06 11:21:24
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞
2023-11-30 16:01:01
——URDF,用來描述機器人外觀、性能等各方面屬性。 機器人的組成 建模描述機器人的過程中,我們自己需要先熟悉機器人的組成和參數,比如機器人一般是由硬件結構、驅動系統、傳感器系統、控制系統四大部分組成,市面上一些常見的機器人,無論是移動
2023-11-22 16:30:14290 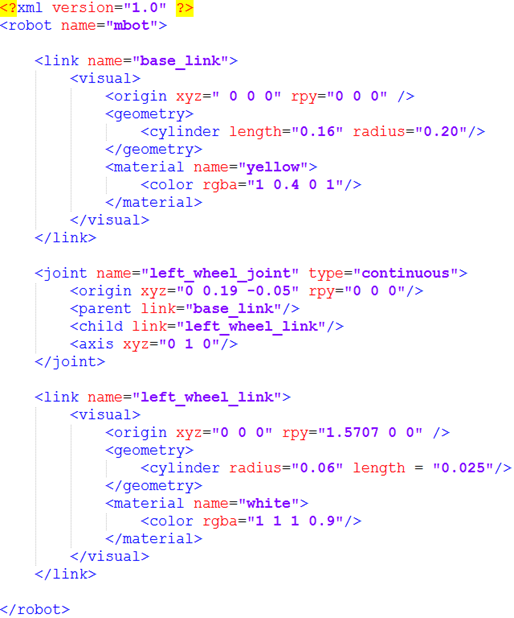
pic單片機做掃地機器人有什么優勢
2023-11-09 07:24:46
控制電纜主要由以下幾部分組成: 導體:導體是控制電纜的基本組成部分,由單根或多根線芯組成。 絕緣層:絕緣層是控制電纜的重要組成,可以保護電纜不受外界環境的影響。 屏蔽層:屏蔽層可以保護電纜不受
2023-11-07 11:30:20458 機器視覺系統主要由三部分組成:圖像的獲取、圖像的處理和分析、輸出或顯示。而圖像的獲取是機器視覺的核心,圖像的獲取系統則是由光源、鏡頭、相機三部分組成。
2023-11-03 12:34:35253 
機器人編程需要什么軟件
2023-11-01 07:34:30
工業機器人在各種行業中發揮著關鍵作用,提高生產效率,降低成本,提高產品質量,甚至改變整個行業的生產方式。那么,一臺完整的工業機器人究竟由哪些部分組成呢?本文將詳細介紹工業機器人的各個組成部分及其功能
2023-10-30 08:07:45891 
工業機器人通常由執行機構、驅動系統、控制系統和傳感系統四部分組成,如下圖所示。
2023-10-25 09:28:461832 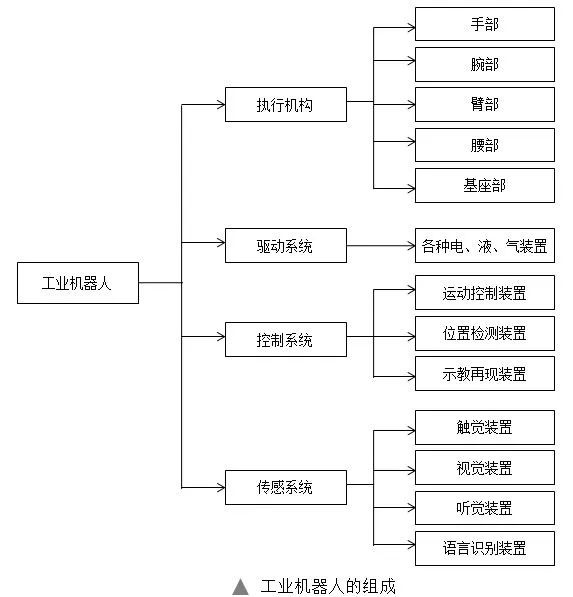
機器人控制系統是機器人的大腦,是決定機器人功用和功能的主要要素。控制系統是按照輸入的程序對驅動系統和實行機構收回指令信號,并進行控制。工業機器人控制技術的主要任務便是控制工業機器人在工作空間
2023-10-23 14:54:16531 
交流接觸器主要由哪幾部分組成?什么類型的交流接觸器可以組合使用? 交流接觸器是一種電氣控制器,在工業生產的自動化控制系統中得到廣泛應用。它通過接通或斷開電路,來控制電氣設備的運行情況,從而實現自動化
2023-10-22 15:03:21939 本文檔的主要內容詳細介紹的是Arduino教學機器人的使用教程
2023-09-27 06:53:26
根據結構化道路環境的特點提出了一種將邊沿檢測和道路環境知識相結合的機器視覺算法 , 并結合基于行為響應的路徑規劃方法和智能預瞄控制方法 , 實現了一套基本的機器人視覺導航系統 . 在自主機器人實驗
2023-09-25 07:23:39
的進行監控管理。
智能電話機器人的另一個優勢是不知疲倦,不需要休息和喝水,不需要休息。人在工作時就會有各種各樣的脾氣,但智能電話機器人不會,永遠都以最嚴謹、最周到的態度和客戶進行溝通。
在科技高速發展
2023-09-21 11:09:59
邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調節,長時間佩戴不會使患者產生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術,為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步機器人BEAR-H系列是用于輔助腦卒中患者步態康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關節提供助力完成行走訓練,可以節省人力,并提高康復效果
2023-09-20 17:25:48
高壓變頻器由幾部分組成? 高壓變頻器(High Voltage Variable Frequency Drive,簡稱HV VFD)是一種用于調節高電壓和高功率電機轉速的設備。它由多個部分組成,包括
2023-09-04 17:15:111625 電阻應變儀主要由哪幾個部分組成? 電阻應變儀是一種專門用來檢測和測量材料應變變化的儀器。它可以精確地測量物體的應變變化,并將這些變化轉化為電阻值的變化。電阻應變儀通常由下面這幾個部分組成: 1.
2023-08-24 14:26:391188 產品介紹小安值班機器人是集電力監控系統、動環輔控系統、巡檢機器人“三合一"功能產品,在自學習算法和大數據的加持下,具備強大的AI能力,可實現配電室的數字化及無人值守。 特色功能全感知電力
2023-08-22 14:57:47
一套最簡單的機器視覺系統包括:視覺成像部分、圖像處理部分、運動控制部分。
2023-08-20 09:39:58389 近幾年,醫院相關“骨科脊柱手術機器人輔助脊柱手術”新聞動態受很多群眾、患者及醫療界同行極大的關注,大家對手術機器人是如何工作的充滿了好奇。這里,小編帶大家來了解下骨科脊柱手術機器人。
2023-08-18 11:09:59423 
采摘耗時長成本大的問題,提出了一種全向移動的草莓采摘機器人系統方案。
系統的硬件電路主要包括以STM32F407ZGT6為核心的主控制器、電源電路、WIFI模塊、激光測距單元、電機驅動模塊。系統
2023-08-16 17:35:54
電池管理系統是指一種用于管理電池的系統, 即管理電池的充放電,使電池處于一個最佳的狀態。它由多個組成部分組成,這些組成部分包括電池管理器、電池監控器、電池保護器、電池均衡器和電池充電器等。下面我們將逐一介紹這些組成部分。
2023-07-03 16:01:446129 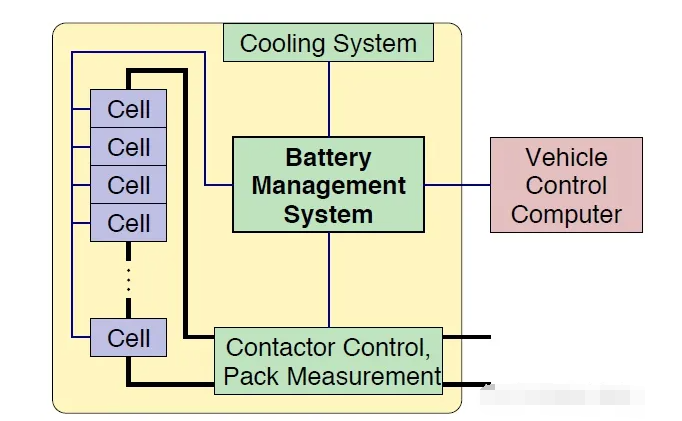
柔性供料/震動盤是主要以小型電子產品為主,那么中大型其它產品就不能解決了嗎?不是!我們針對柔性供料所研發的系統,它是可以適用于所有電子產品。柔性供料系統它包含CCD視覺、CCD視覺控制系統與機器人
2023-06-29 14:46:57
北京術銳機器人股份有限公司旗下的術銳單孔腔鏡手術機器人近日獲得國家藥品監督管理局的上市批準,這也是國內首個內窺鏡單孔手術系統,填補了國內空白。
2023-06-29 10:27:31243 
則提供了對多臺移動機器人進行管理的功能,包括機器人的電量控制、狀態監測、報警處理等。
上位機軟件主要由2個主界面組成:主從機的登錄通信模塊以及移動機器人當前話題列表和運動信息顯示界面、可視化界面以及
2023-06-28 09:36:32
手術機器人主要由機械臂、影像系統和計算機系統三部分組成,根據醫療環境和醫患之間的實際需求,編制流程、執行動作,以達到輔助定位、造影建模、手術操作等目的。
2023-06-15 14:53:47270 不要被復雜的生產線嚇倒,生產線可以看成多個單獨的設備或機器人,每部分完成一個功能。
2023-06-08 17:40:58
自編程是如何完成的。
自編程其實也不是很高深的問題。
當用戶給出參數時,有時也包括邏輯。
例如用戶說,如果設備打開完畢,執行一個命令。
這個例子就包括了一個如果。你的智能機器人只需要生成一個
2023-06-08 16:20:45
windos消息模式可在機器人編程中復制。它有很多優點。
例如一個中斷,反應速度非常快。缺點就是中斷太少。
我們可以設定一個軟中斷,范圍可取0-65535
首先第一個中斷處理標記,也就是事件處理
2023-06-06 16:48:53
機器人也是一種設備,它主要內容是完成一個制造的其中一個功能。
制造一個產品,可以分為幾個部件。和裝配幾個部件。
一個部件,可以是一個模具。或者由機器人完成組成一個模具。
機器人主要完成的是一些模具
2023-06-06 16:18:33
核心產品康多機器人(腔鏡手術機器人)是行業內首個在泌尿外科領域進入國家創新醫療器械特別審批程序(綠色通道)的腔鏡手術機器人,已于2022年6月獲得第三類醫療器械注冊證。同時也是首個在單家醫院開展手術
2023-06-05 16:54:051680 
國內手術機器人裝機數量與機器人手術數量屢破新高,并保持高速增長。截至目前,微創機器人、天智航、思睿哲、精鋒醫療、醫達健康、鍵嘉醫療、華科精準、鑄正機器人、和華瑞博等企業推出的手術機器人均已實現商業化裝機。
2023-06-03 10:05:52194 
模型要具備齒輪,導軌幾種基本的運動原理。
要分辨基本圖形,視覺模型要能分辨圓形,方形和三角形。
有了這兩點,機器人就基本上能計算開模和注塑這種簡單的工作了。要替代人類的工作,還要進一步學習。
2023-05-19 20:40:25
目前手術機器人多用于骨科手術、神經外科、血管介入治療機器人等手術中的輔助定位、造影建模或者是開刀等場景,通常由床旁機械臂系統、控制臺和可視化系統等組成。
2023-05-17 10:40:59151 一站式PCBA智造廠家今天為大家講講pcb由哪些部分組成成型?pcb線路板的構成部分及作用。PCB是由各種不同的層組成的,不同的層有不同的用途和意義,為方便大家更好的理解PCB的組成,接下來為大家詳解PCB組成元素。
2023-05-17 09:46:182536 兒童陪護機器人越來越受到人們的關注,其中轉動控制是其重要組成部分之一。步進電機芯片作為一種常用的控制芯片,被廣泛應用于兒童陪護機器人中的轉動控制。本文將從步進電機芯片的工作原理、優勢和應用場景等方面
2023-05-11 15:12:45
無線通信系統由哪幾部分組成?各部分起什么作用?
2023-05-09 16:20:43
無線網絡一般由哪幾個部分組成?無線網絡和蜂窩網絡的區別有哪些?
2023-05-09 16:16:58
定位, 且轉動慣性小,動態響應快。主要應用包括自動化生產線,機器人關節,機器人關節、醫醫療儀器及設備、精密儀器和工業控制系統,以及其他許多的應用。
2023-04-20 10:07:10
RJU系列關節模組——面向商業、生活服務類應用一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身
2023-04-19 15:23:14
泰科關節機器人具備哪些優勢? 一、編程簡單可以讓無編程經驗的操作人員能快速設置和操作我們的直觀、3D 可視化協作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 15:03:00
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:43:30
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:39:15
深圳泰科智能TA6系列協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:53:03
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:48:11
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-19 10:40:37
TB6-R3協作機器人是一款靈活的小型工業協作機器人,其精巧的機械結構設計,外形緊湊,能夠適應狹小的工作空間,及高精密的工作任務需求;這款協作機器人自重僅為11.5KG,有效負載為3KG,工作半徑達666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:18:50
TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作機器人功能強大、高自重負載比、高可靠性、模塊化關節設計,易于末端擴展外部設備,可以實現快速安裝部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。-
2023-04-19 09:22:29
TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產應用需求。模塊化
2023-04-19 09:16:32
定位, 且轉動慣性小,動態響應快。主要應用包括自動化生產線,機器人關節,機器人關節、醫醫療儀器及設備、精密儀器和工業控制系統,以及其他許多的應用。
2023-04-18 17:35:19
模組組成的最小機器人自重僅15kg。安裝簡單RJS關節模組簡化了機器人的裝配流程,裝配過程不再有繁復的零件組裝和走線,一臺6軸機器人僅需要2-3小時便能快速完成。
2023-04-18 14:04:34
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-17 18:01:33
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 17:40:55
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。
2023-04-17 16:36:37
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 16:12:03
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:57:13
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:31:15
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:25:07
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:15:06
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:07:26
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
至關重要。它可以確保機器按照正確的水量清潔地面,并及時將污水清除。在未來,液位檢測技術將繼續得到進一步發展,以提高機器人的清潔效率和便攜性。能點科技光電液位傳感器靈敏度高,主要供應液位開關,傾倒開關,小型流量計,分離式液位開關,水位傳感器,水位開關,輕觸開關,水箱控制開關,魚缸自動智能補水器等產品。
2023-04-15 11:21:46
,越來越多的管道被鋪設在地下,如此大面積的地下管廊該如何快速而精準的維護呢?考慮到地下管廊環境復雜并且具有一定的危險性,地下空間智能巡檢機器人便應運而生,可以為地下管廊加裝智能機器人巡檢監測系統和處置系統
2023-04-12 15:49:23
用電結構和保證電能安全具有重要作用。 配電自動化系統主要由什么組成 1.配電監控與管理系統:系統通過獨立的監控終端對配電系統進行實時監測和管理,可對系統負荷、電能使用情況、設備運行狀態等進行
2023-04-10 17:04:59
焊接機器人的結構組成:由機械、傳感和控制三大部分組成,分為伺服驅動、機械本體、計算機控制、傳感系統、輸入輸出(I/O)和人機交互六個子系統。
2023-04-07 10:53:522417 配電系統是指電力系統中將高壓電能通過變電所等電力設施降壓后,分配到終端用戶的系統。簡單來說,配電系統是將高壓電能轉化為低壓電能,然后將電能輸送到用戶的電力系統。
2023-04-06 17:43:273651 機器人的系統結構 一臺通用的工業機器人,按其功能劃分,一般由 3 個相互關連的部分組成:機械手總成、控制器、示教系統,如圖 1 所示。
2023-03-24 10:22:452361 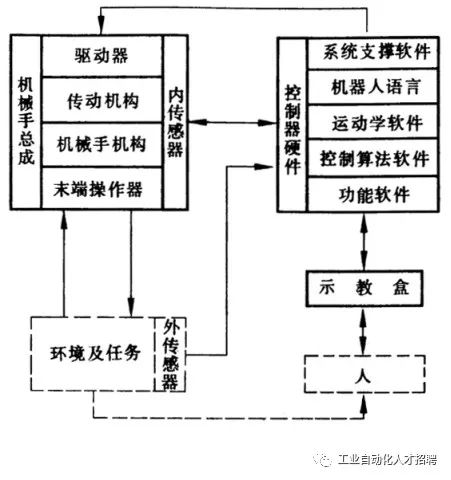
焊接機器人是從事焊接(包括切割與噴涂)的工業機器人,它主要包括機器人和焊接設備兩部分。其中,機器人由機器人本體和控制柜(硬件及軟件)組成;而焊接裝備,以弧焊及點焊為例,則由焊接電源(包括其控制系統)、送絲機(弧焊)、焊槍(鉗)等部分組成。對于智能機器人,還應配有傳感系統,如激光或攝像傳感器及其控制裝置等。
2023-03-24 10:19:10912
 電子發燒友App
電子發燒友App














 工商網監
工商網監
評論