在數(shù)字電路中,RS觸發(fā)器(也稱為RS鎖存器)是一種基本的雙穩(wěn)態(tài)觸發(fā)器,它可以通過(guò)特定的輸入信號(hào)來(lái)實(shí)現(xiàn)置位(Set)和復(fù)位(Reset)操作。
2023-09-28 16:31:07 1317
1317 線圈 1.6 -(#)- 中間輸出 1.7 -(R) 線圈復(fù)位 1.8 -(S) 線圈置位 1.9 RS 復(fù)位置位觸發(fā)器 1.10 RS 置位復(fù)位觸發(fā)器 1.11 -(N)- RLO下降沿檢測(cè) 1.12
2023-08-23 10:16:55322 
在前面的文章中有過(guò)對(duì)于寄存器行為的描述,而復(fù)位方面,在電路設(shè)計(jì)時(shí)建議使用帶異步復(fù)位/置位的寄存器。
2023-08-01 16:04:11728 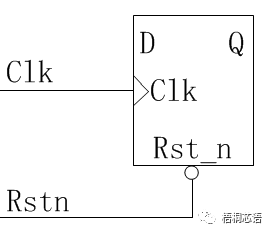
在前面的文章中有過(guò)對(duì)于寄存器行為的描述,而復(fù)位方面,在電路設(shè)計(jì)時(shí)建議使用帶異步復(fù)位/置位的寄存器。
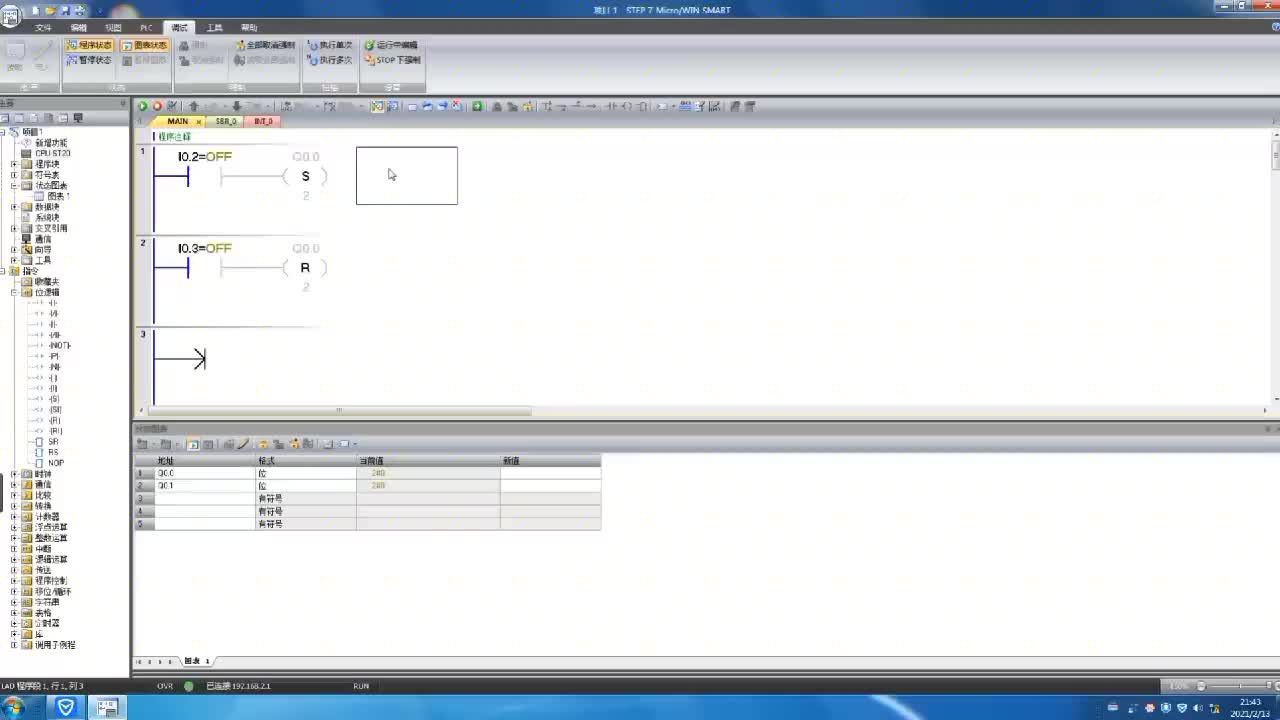
2023-07-13 17:33:58340 可以使用“置位復(fù)位觸發(fā)器”指令,根據(jù)輸入 S 和 R1 的信號(hào)狀態(tài),置位或復(fù)位指定操作數(shù)的位。
2023-06-21 11:45:211989 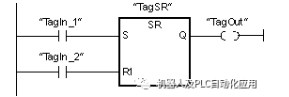
可以使用“置位復(fù)位觸發(fā)器”指令,根據(jù)輸入 S 和 R1 的信號(hào)狀態(tài),置位或復(fù)位指定操作數(shù)的位。如果輸入 S 的信號(hào)狀態(tài)為“1”且輸入 R1 的信號(hào)狀態(tài)為“0”,則將指定的操作數(shù)置位為“1”。如果輸入 S 的信號(hào)狀態(tài)為“0”且輸入 R1 的信號(hào)狀態(tài)為“1”,則將指定的操作數(shù)復(fù)位為“0”。
2023-06-21 11:45:19577 
可以使用“ 生成關(guān)斷延時(shí)”(Generate off-delay) 指令將延時(shí)所指定的時(shí)間 PT 復(fù)位輸出 Q。當(dāng)輸入 IN 的邏輯運(yùn)算結(jié)果 (RLO) 從“0”變?yōu)椤?”(上升沿)時(shí),置位 Q
2023-06-06 10:21:28821 
西門子1200PLC的脈沖沿指令是一種非常重要的指令,它可以檢測(cè)輸入信號(hào)的上升沿或下降沿,并在檢測(cè)到沿時(shí)產(chǎn)生一個(gè)脈沖。
2023-05-23 09:20:304534 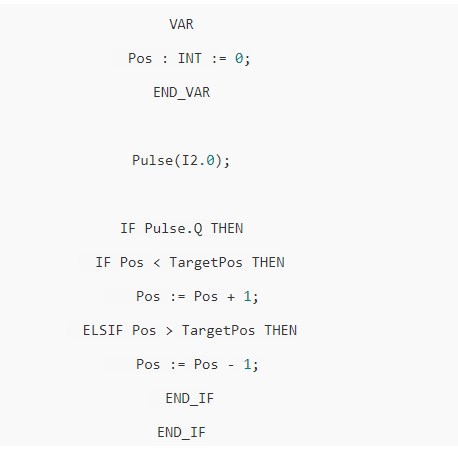
當(dāng)I0.0接通,I0.1未接通時(shí),Q0.0置位。
2023-05-16 17:05:542459 
-( ) 輸出線圈
1.6 -(#)- 中間輸出
1.7 -(R) 線圈復(fù)位
1.8 -(S) 線圈置位
2023-05-16 12:32:551070 一、脈沖指令
1.ZRN指令
2.PLSY指令
PLSY: 16位連續(xù)執(zhí)行型脈沖輸出指令。
DPLSY:32位連續(xù)執(zhí)行型脈沖輸出指令。
2023-04-19 10:26:59 0
0 基本指令
邏輯取及驅(qū)動(dòng)線圈指令LD、LDI、OUT
觸電串、并聯(lián)指令AND、ANI、OR、ORI
電路塊連接指令ANB、ORB
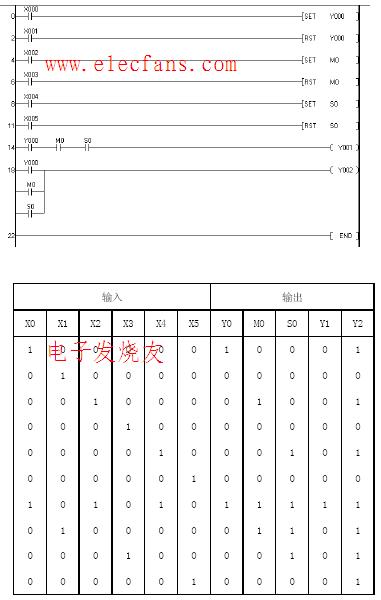
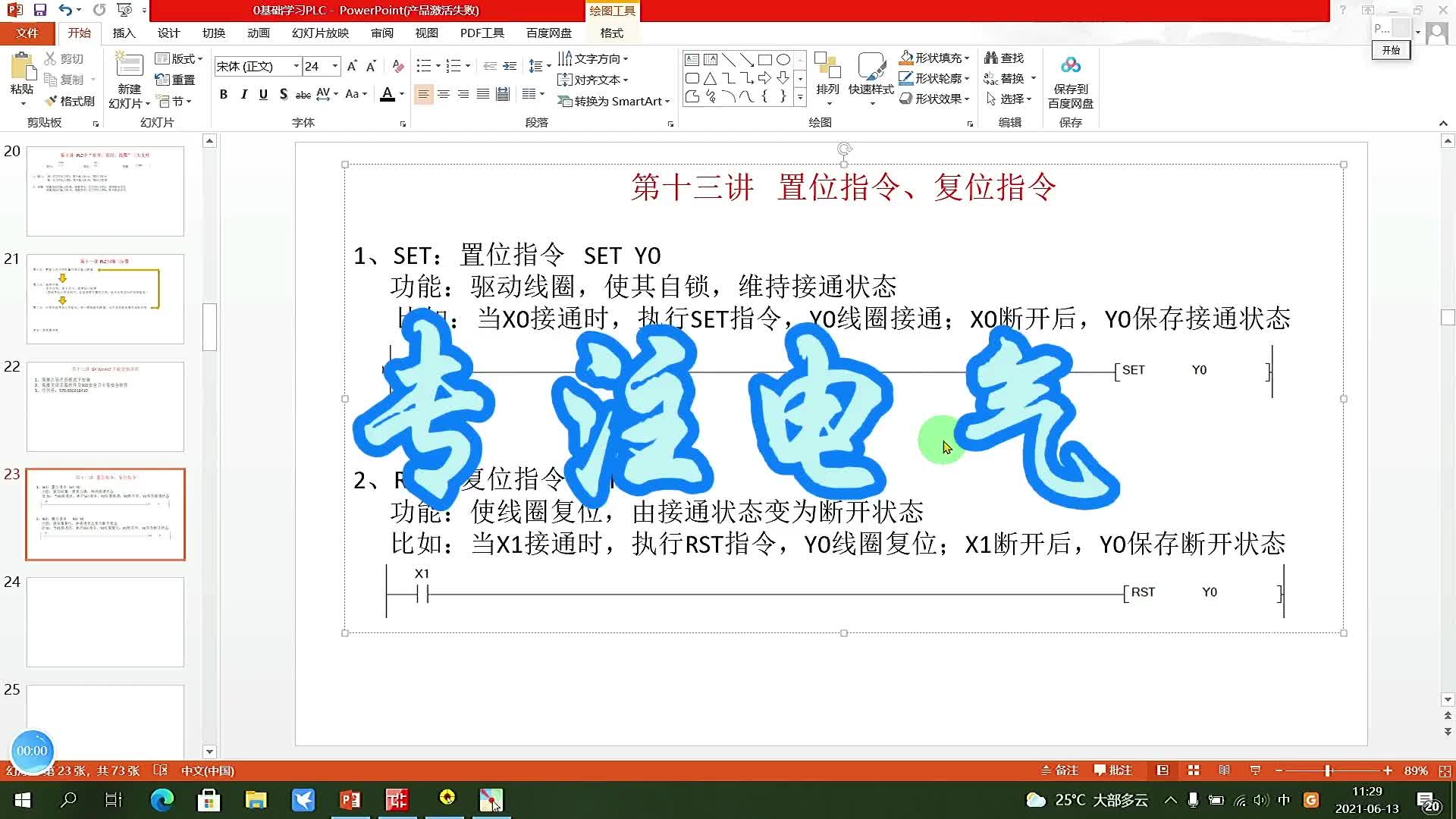
置位與復(fù)位指令SET、RST
空操作和程序結(jié)束指令要素表
2023-04-18 09:36:490 RS:復(fù)位/置位觸發(fā)器。如果R輸入端的信號(hào)狀態(tài)為“1”,S1輸入端的信號(hào)狀態(tài)為“0”,則復(fù)位。如果R輸入端的信號(hào)狀態(tài)為“0”,S1輸入端的信號(hào)狀態(tài)為“1”,則置位觸發(fā)器。如果兩個(gè)輸入端的RLO狀態(tài)
2023-04-08 09:20:402355 ://bbs.elecfans.com 電子技術(shù)論壇http://www.solar-ruike.com.cn 電子發(fā)燒友 https://bbs.elecfans.com 電子技術(shù)論壇實(shí)驗(yàn)二 置位/復(fù)位及脈沖指令實(shí)驗(yàn)一、實(shí)驗(yàn)目的1
2008-09-22 18:50:53
SET/RST指令,SET置位指令,相當(dāng)于保持當(dāng)前狀態(tài),RST復(fù)位指令,恢復(fù)之前的狀態(tài)。
2023-03-01 11:44:19401 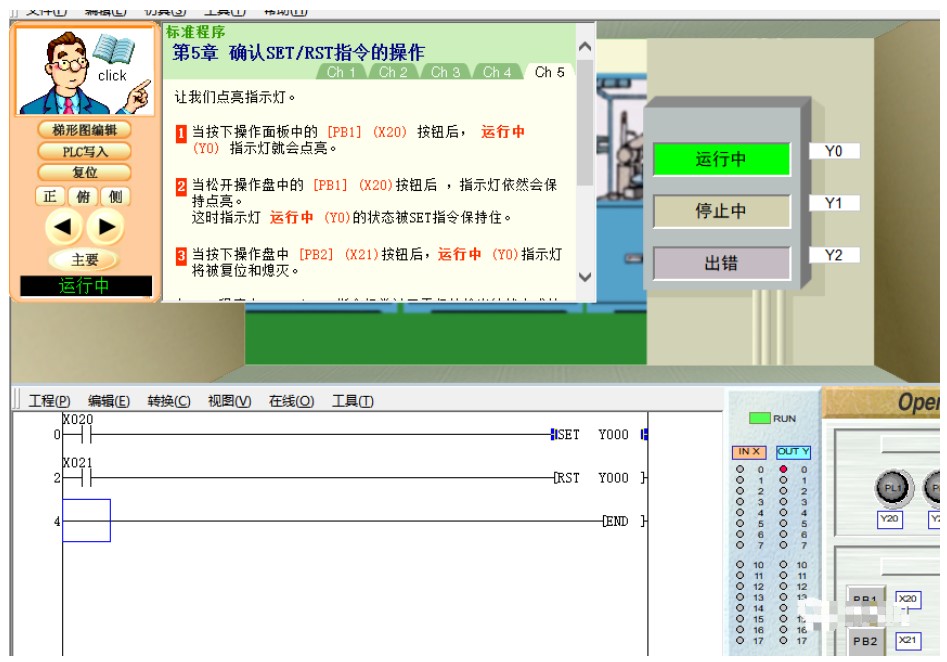
具有置位和復(fù)位功能的雙 JK 觸發(fā)器;上升沿觸發(fā)-74HC_HCT109_Q100
2023-02-20 19:08:442 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74HC_HCT74_Q100
2023-02-20 19:02:151 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74AHC_AHCT74
2023-02-20 19:01:551 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74AHC_AHCT74_Q100
2023-02-20 19:01:410 在針對(duì)特定的ASIC或FPGA之前,綜合編譯器使用的通用觸發(fā)器具有高電平有效的置位和復(fù)位輸入。
2023-02-19 10:22:17264 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74LVC74A_Q100
2023-02-17 20:05:020 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74ABT74
2023-02-17 19:21:451 具有置位和復(fù)位功能的雙 JK 觸發(fā)器;下降沿觸發(fā)-74HC_HCT112
2023-02-17 18:47:061 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74LV74
2023-02-16 21:04:460 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74LV74_Q100
2023-02-16 21:04:330 具有置位和復(fù)位功能的單 D 型觸發(fā)器;上升沿觸發(fā)-74LVC2G74_Q100
2023-02-16 20:45:470 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74ALVC74
2023-02-15 20:11:510 具有置位和復(fù)位功能的雙 JK 觸發(fā)器;正 - 邊 - 觸發(fā)-74HC_HCT109
2023-02-15 20:02:181 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74LVC74A
2023-02-15 19:50:561 具有置位和復(fù)位功能的單 D 型觸發(fā)器;上升沿觸發(fā)-74LVC2G74
2023-02-15 19:45:510 具有置位和復(fù)位功能的雙 D 型觸發(fā)器;上升沿觸發(fā)-74HC_HCT74
2023-02-15 19:35:080 具有置位和復(fù)位功能的單 D 型觸發(fā)器;上升沿觸發(fā)-74LVC1G74
2023-02-15 19:27:150 具有置位和復(fù)位功能的單 D 型觸發(fā)器;上升沿觸發(fā)-74LVC1G74_Q100
2023-02-15 19:26:550 具有置位和復(fù)位功能的低功耗 D 型觸發(fā)器;正邊沿觸發(fā)-74AUP1G74_Q100
2023-02-09 19:24:010 具有置位和復(fù)位功能的低功耗 D 型觸發(fā)器;正邊沿觸發(fā)-74AUP1G74
2023-02-07 19:00:580 PLS?(脈沖)上升沿微分輸出指令 PLF?(脈沖)下降沿微分輸出指令 例?圖?1?和?2 轉(zhuǎn)發(fā)是最大的鼓勵(lì)!謝謝您的支持! 編輯:何安
2023-01-11 11:11:112310 數(shù)據(jù)處理指令含批復(fù)位指令、編、譯碼指令及平均值計(jì)算等指令。其中批復(fù)位指令可用于數(shù)據(jù)區(qū)的初始化,編、譯碼指令可用于字元件中某一置 1 位的位碼的編譯。
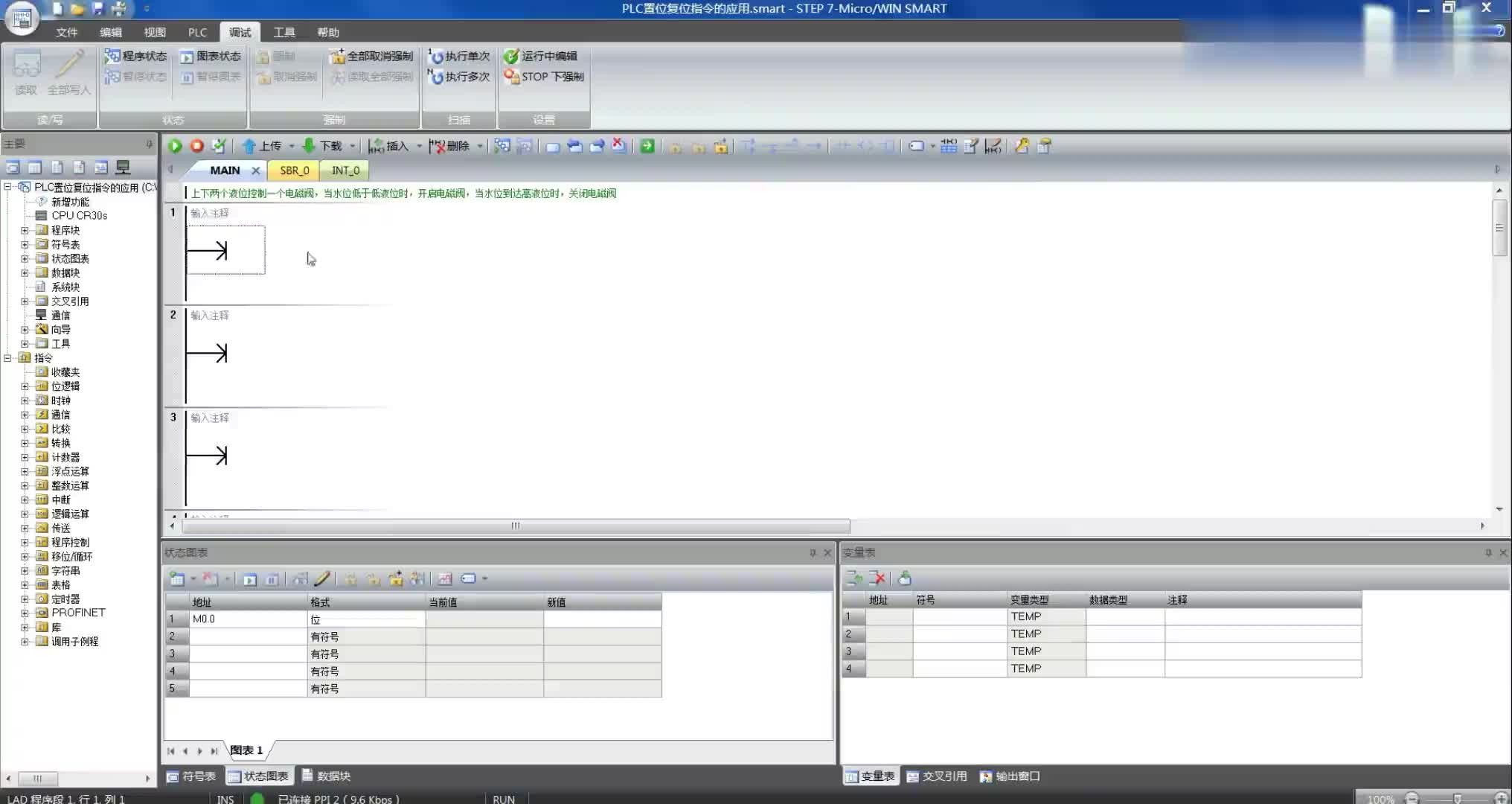
2023-01-10 10:05:06378 本案例,利用液體混合控制程序設(shè)計(jì),主要讓讀者練習(xí)西門子S7-200SMART系列PLC的比較和傳送、置位、復(fù)位等指令的使用。
2022-10-19 10:15:485109 SMC三位置氣缸規(guī)格書下載
2022-09-28 09:12:420 采用中斷輸入方式對(duì)指定時(shí)間內(nèi)的輸入脈沖進(jìn)行計(jì)數(shù)的指令。根據(jù)版本不同,這個(gè)指令的功能也不同。
2022-09-26 11:38:012183 作;對(duì)于線圈指令而言,1表示信號(hào)流到達(dá)線圈,O表示信號(hào)流未到達(dá)線圈。 位邏輯指令是plc編程中最基本、使用最頻繁的指令,按不同的功能和用途具有不同的形式,總的來(lái)說(shuō)可以分為下述幾大類:標(biāo)準(zhǔn)位邏輯指令、置位/復(fù)位指令、立即位邏輯指令、其他位邏輯指令。 標(biāo)
2022-02-04 16:22:004847 ?? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?位操作指令位操作類指令位操作又稱為布爾操作,是以位為單位進(jìn)行的各種操作。在布爾處理機(jī)中,借用進(jìn)位
2022-01-13 13:54:283 定義如下: 當(dāng)是軟件復(fù)位時(shí),主要觀察IOPUWR位或WDTO位是否被置1,當(dāng)是硬件復(fù)位時(shí),主要觀察BOR和POR是否被置1。...
2021-11-16 11:21:0213 實(shí)驗(yàn)一脈沖幅度調(diào)制(pam)與系統(tǒng)實(shí)驗(yàn)(電源技術(shù)作業(yè) 2018年發(fā)布的答案)-實(shí)驗(yàn)一脈沖幅度調(diào)制(pam)與系統(tǒng)實(shí)驗(yàn).........
2021-09-24 11:23:0615 標(biāo)準(zhǔn)位邏輯指令包括常開(kāi)觸點(diǎn)、常閉觸點(diǎn)和輸出線圈指令;置位/復(fù)位指令包括置位指令、復(fù)位指令、置位優(yōu)先RS觸發(fā)器指令和復(fù)位優(yōu)先RS觸發(fā)器指令;
2021-06-13 15:41:0012804 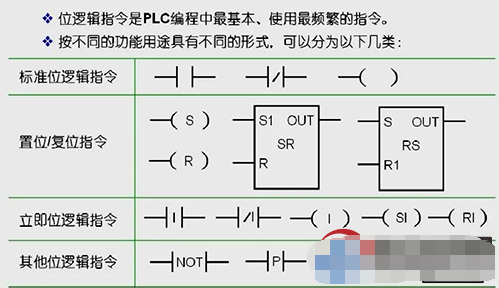
斜坡信號(hào)指令RAMP的編程手冊(cè)截圖如下圖23-1所示,有4個(gè)操作數(shù),僅適用于16位,無(wú)脈沖執(zhí)行型。
2021-01-17 09:54:467449 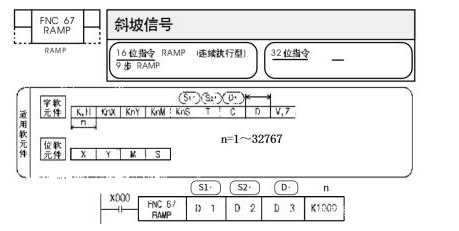
根據(jù)代碼,容易推斷得出這是一個(gè)高電平觸發(fā)、異步復(fù)位的觸發(fā)器(或者叫異步置位),這也與前面的內(nèi)容相符合(高電平觸發(fā)復(fù)位,所以不用加反相器)。
2020-11-14 11:32:008878 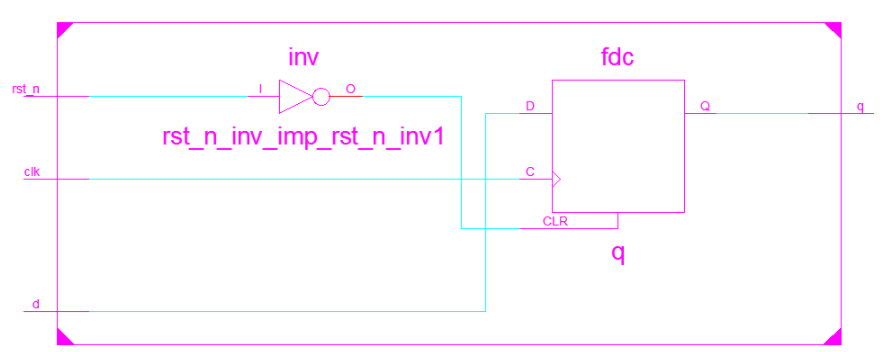
置位、復(fù)位的點(diǎn)數(shù)N可以是1—255。當(dāng)用復(fù)位指令時(shí),如果bit或OUT指令的是T或C位,那么定時(shí)器或計(jì)數(shù)器被復(fù)位,同時(shí)計(jì)數(shù)器或定時(shí)器當(dāng)前值被清零。
2020-08-20 15:54:001133 
讓PLC輸出脈沖的方法還是比較多的,我們可以根據(jù)控制不同的負(fù)載,通過(guò)不同的指令輸出脈沖的頻率是不一樣的。下面我們以日系PLC(可編程控制器)與各位朋友說(shuō)說(shuō)如何用指令使PLC一直輸出脈沖的方法。
2019-10-19 11:03:1033735 系統(tǒng)復(fù)位是置位同一個(gè)寄存器中的 SYSRESETREQ 位。
2019-07-31 16:12:1039122 進(jìn)位標(biāo)志做為累加位,以內(nèi)部RAM可尋址的128個(gè)為存儲(chǔ)位。 既然有布爾處理機(jī)功能,所以也就有相應(yīng)的布爾操作指令集,下面我們分別談?wù)摗?位置位復(fù)位指令 這些指令對(duì)CY及可尋址位進(jìn)行置位或復(fù)位操作,共有四條指令。 CLR C ; 0CY,清CY CLR bit ; 0bit,清某一位
2019-01-17 16:15:024517 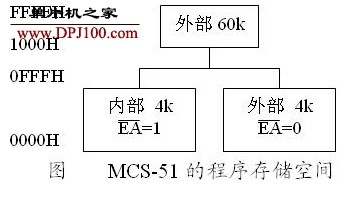
本文介紹西門子s7-200 plc的置位與復(fù)位,這兩個(gè)位操作的指令在我們的程序編寫中,作用也是很大,它能完成一些,常規(guī)常開(kāi)常閉觸點(diǎn)編程無(wú)法完成的程序,可以使我們編寫的PLC程序條理更加清晰,步驟更加簡(jiǎn)單。
2018-09-10 09:54:046702 
本文介紹西門子s7-200 plc的置位與復(fù)位,這兩個(gè)位操作的指令在我們的程序編寫中,作用也是很大,它能完成一些,常規(guī)常開(kāi)常閉觸點(diǎn)編程無(wú)法完成的程序,可以使我們編寫的PLC程序條理更加清晰,步驟更加簡(jiǎn)單。
2018-07-24 15:03:479882 
對(duì)于xilinx 7系列的FPGA而言,flip-flop支持高有效的異步復(fù)/置位和同步復(fù)位/置位。對(duì)普通邏輯設(shè)計(jì),同步復(fù)位和異步復(fù)位沒(méi)有區(qū)別,當(dāng)然由于器件內(nèi)部信號(hào)均為高有效,因此推薦使用高有效的控制信號(hào),最好使用高有效的同步復(fù)位。輸入復(fù)位信號(hào)的低有效在頂層放置反相器可以被吸收到IOB中。
2018-07-13 09:31:005911 規(guī)則3.20:以下主機(jī)信號(hào)必須在RST_I置位(變?yōu)?)后的第一個(gè)時(shí)鐘上升沿復(fù)位(變?yōu)?),直到RST_I被復(fù)位(變?yōu)?)后的第一個(gè)時(shí)鐘上升沿到來(lái):STB_O,CYC_O。所有的其他主機(jī)此時(shí)不能操作
2018-07-11 09:07:142934 
-( ) 輸出線圈 1.6 -(#)- 中間輸出 1.7 -(R) 線圈復(fù)位 1.8 -(S) 線圈置位 1.9 RS 復(fù)位置位觸發(fā)器 1.10 RS 置位復(fù)位觸發(fā)器 1.11
2018-05-27 09:04:1232106 
M0閉合,PLC在Y0口發(fā)脈沖以500的速度共發(fā)出2000脈沖,發(fā)完脈沖后M8029動(dòng)作,復(fù)位M0。M1閉合,PLC在Y1口發(fā)脈沖,當(dāng)脈沖距離為0時(shí),PLC一直發(fā)脈沖,并以脈沖速度1000運(yùn)行,此時(shí),M8029動(dòng)作完成標(biāo)志位無(wú)法動(dòng)作。
2018-04-12 09:33:14138290 
是西門子s7200 PLC的,啟動(dòng),保持,停止的控制電路和程序,我們知道右邊的這個(gè)程序,它是用單純的常開(kāi)和常閉的位操作指令編寫的,可以完成自鎖的功能。大家不太明白的再看一下上一節(jié)。但除了以上介紹的,這個(gè)自鎖功能還能用我們今天講的置位和復(fù)位操作來(lái)完成。
2018-04-09 17:04:5996838 
圖,再根據(jù)時(shí)序圖設(shè)計(jì)流程圖,再按流程圖編制梯形圖程序。下面讓我們來(lái)看看plc時(shí)序圖是怎么樣的,相關(guān)指令又有什么用。 時(shí)序圖的指令大致分為置位和復(fù)位指令、脈沖輸出指令以及 主控指令及主控復(fù)位指令 。 一、置位和復(fù)位指令:
2017-10-23 08:40:4582371 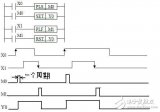
必須相同。 指令格式: 控制條件: (a) 復(fù)位信號(hào)**(RST)** RST=0:不復(fù)位。 RST=1:復(fù)位輸出W1,置W1=0。 (b) 指令信號(hào)**(ACT)** ACT=0:不執(zhí)行ADDB指令
2017-09-29 14:16:240 碼長(zhǎng)度。 (b) 復(fù)位信號(hào) RST=0:不復(fù)位。 RST=1:復(fù)位錯(cuò)誤輸出W1,置W1=0。 (c) 指令信號(hào) ACT=0:不執(zhí)行ADD指令,W1不改變。 ACT=1:執(zhí)行ADD指令。 參數(shù): (a
2017-09-29 14:07:520 在Xilinx 的FPGA器件中,全局的復(fù)位/置位信號(hào)(Global Set/Reset (GSR))(可以通過(guò)全局復(fù)位管腳引入)是幾乎絕對(duì)可靠的,因?yàn)樗切酒瑑?nèi)部的信號(hào)。
2017-02-11 11:46:19810 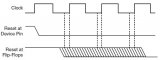
本文對(duì)阻容復(fù)位電路和監(jiān)控器產(chǎn)生的復(fù)位脈沖的特性進(jìn)行了對(duì)比分析,結(jié)果發(fā)現(xiàn),在電源出現(xiàn)瞬時(shí)跌落或有干擾的情況下,阻容復(fù)位電路可能無(wú)法產(chǎn)生所需的復(fù)位脈沖。另外,還介紹了常用監(jiān)控器件功能和如何正確選擇監(jiān)控器復(fù)位門限電壓。
2017-01-11 11:53:4411 可編程控制器實(shí)驗(yàn)教程之位邏輯指令實(shí)驗(yàn),很好的學(xué)習(xí)資料。
2016-04-19 13:57:2317 置位/復(fù)位電路有多種設(shè)計(jì)方法,應(yīng)根據(jù)成本預(yù)算和設(shè)置的磁場(chǎng)分辨率來(lái)選擇最佳方案。置位脈沖和復(fù)位脈沖對(duì)傳感器所起的作用是基本一樣的,唯一的區(qū)別是傳感器的輸出改變正負(fù)號(hào)。
2012-04-28 13:48:5511
CMP指令應(yīng)用脈沖定位控制程序
2009-07-04 08:17:3032 阻容復(fù)位器和監(jiān)控器復(fù)位脈沖比較:
2009-05-26 15:18:2819 按鍵脈沖復(fù)位電路圖
2009-04-05 09:38:555271 
具有置位和復(fù)位輸入端的長(zhǎng)周期單穩(wěn)態(tài)多諧振蕩器
2009-03-29 09:21:12365 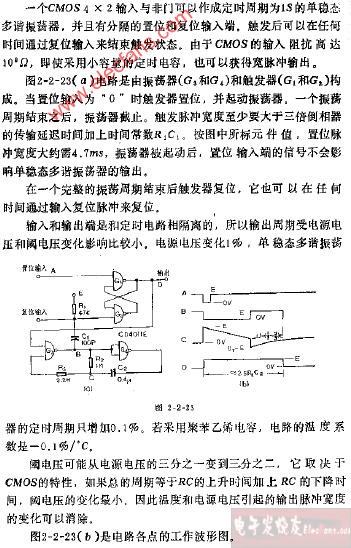
位操作指令
位操作類指令共有17條,均以位為操作對(duì)象,分別完成位傳送、位狀態(tài)控制、位邏輯運(yùn)算、位條件轉(zhuǎn)移等功能,在匯編語(yǔ)言中,位地址的表示方式有以下4種:
2009-03-14 15:35:302929 微機(jī)實(shí)驗(yàn):指令功能實(shí)驗(yàn)
實(shí)驗(yàn)目的
1、熟悉仿真器操作;
2、掌握51系列指令功能及其機(jī)器碼的編譯。
(一)數(shù)據(jù)傳送和運(yùn)算
實(shí)驗(yàn)內(nèi)容
2008-10-17 22:42:341376 棧及主控指令實(shí)驗(yàn)
一、實(shí)驗(yàn)目的1、掌握進(jìn)棧(MPS)、讀棧(MRD)、出棧(MPP)指令的使用方法 。2、掌握主
2008-09-23 08:05:071618 
基本邏輯指令的編程實(shí)驗(yàn)
一、實(shí)驗(yàn)目的
1、掌握FX2系列PLC基本邏輯指令的用
2007-12-26 22:35:093688 
 電子發(fā)燒友App
電子發(fā)燒友App

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論