步進(jìn)電機(jī)中的力矩(g.cm),轉(zhuǎn)矩(n.m),扭矩(kg.m)有什么區(qū)別?步進(jìn)電機(jī)中的力矩(g.cm),轉(zhuǎn)矩(n.m),扭矩(kg.m)有什么區(qū)別?力矩、轉(zhuǎn)矩和扭矩在步進(jìn)電機(jī)中其實(shí)就是一樣
2021-09-15 06:01:52
步進(jìn)電機(jī)可以連續(xù)運(yùn)轉(zhuǎn)嗎?步進(jìn)電機(jī)長(zhǎng)時(shí)間連續(xù)運(yùn)轉(zhuǎn)會(huì)致使電機(jī)溫度上升,當(dāng)超過(guò)電機(jī)內(nèi)部的耐熱等級(jí),會(huì)使得絕緣性能劣化。當(dāng)使用步進(jìn)電機(jī)時(shí)只要保持電機(jī)外殼表面溫度在100度以下,即可連續(xù)運(yùn)轉(zhuǎn)。您可通過(guò)以下
2021-07-08 07:21:56
角度,一定要不間斷通電,以達(dá)到制動(dòng)作用。而步進(jìn)電機(jī)只要維持勵(lì)磁就能得到保持轉(zhuǎn)矩。永磁型、混合型步進(jìn)電動(dòng)機(jī)即使切斷勵(lì)磁也能得到定位轉(zhuǎn)矩;因此,用步進(jìn)電動(dòng)機(jī)實(shí)現(xiàn)準(zhǔn)確的定位控制既簡(jiǎn)單、成本又低。(4)步距角誤差步進(jìn)
2016-04-05 18:12:03
步進(jìn)電機(jī)基礎(chǔ)(3.1)-步進(jìn)電機(jī)的原理與特性之基礎(chǔ)理論前言基本信息公式前言說(shuō)明步進(jìn)電機(jī)的原理與特性之基礎(chǔ)理論3. 1 基礎(chǔ)理論1. 轉(zhuǎn)矩的產(chǎn)生及負(fù)載角1) PM型電機(jī)的轉(zhuǎn)矩及負(fù)載角2) VR型電機(jī)
2021-06-30 07:21:55
步進(jìn)電機(jī)基礎(chǔ)(8.1)-步進(jìn)電機(jī)的問(wèn)題解決方案-增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法前言基本信息前言說(shuō)明8.1 增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法1 . 步進(jìn)電機(jī)在低速時(shí)增加轉(zhuǎn)矩的方法1) 選擇步距角小的步進(jìn)電機(jī)2) 雙極型
2021-07-07 07:29:39
步進(jìn)電機(jī)的轉(zhuǎn)矩為什么會(huì)隨著速度增大而降低?
2023-11-03 07:58:59
和編碼器3.定位(齒槽)轉(zhuǎn)矩特性測(cè)量法前言基本信息名稱描述說(shuō)明教材名稱步進(jìn)電機(jī)應(yīng)用技術(shù)作者坂本正文譯者王自強(qiáng)前言說(shuō)明根據(jù)我讀的《步進(jìn)電機(jī)應(yīng)用技術(shù)》這本書,進(jìn)行的學(xué)習(xí)過(guò)程中的知識(shí)記錄和心得體會(huì)的記錄。說(shuō)明??為了評(píng)估步進(jìn)電機(jī)的特性必須要有必要的測(cè)量方法。本章針對(duì)步
2021-07-07 07:28:34
一般在步進(jìn)電機(jī)的書里面說(shuō)的大多是這樣的:隨著步進(jìn)電機(jī)的脈沖頻率增大,轉(zhuǎn)矩變小。但是都沒有具體說(shuō)數(shù)學(xué)關(guān)系,有沒有公式之類的描述?
2016-01-18 09:34:00
步進(jìn)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩是什么關(guān)系?轉(zhuǎn)速高低對(duì)轉(zhuǎn)矩的影響?
2023-12-12 07:00:21
轉(zhuǎn)矩公式:T=F?rT=F*rT=F?r轉(zhuǎn)矩=扭力*作用半徑電機(jī)功率:P=F?VP=F*VP=F?V功率=力*速度轉(zhuǎn)動(dòng)慣量: J=∫mr2dmJ=∫ mr ^2 dmJ=∫mr2dm轉(zhuǎn)動(dòng)慣量是表征
2021-08-31 06:35:47
1. 電機(jī)在加速時(shí)怎么減小電機(jī)轉(zhuǎn)矩的波動(dòng)?2. 電機(jī)在速度控制時(shí)怎么保證轉(zhuǎn)矩恒定?
2018-08-28 11:23:09
齒槽轉(zhuǎn)矩產(chǎn)生的振動(dòng)和噪聲將被放大?變速中,轉(zhuǎn)矩頻率與定子或轉(zhuǎn)子的機(jī)械共振頻率一致時(shí)。5:齒槽轉(zhuǎn)矩對(duì)電機(jī)性能的影響?影響電機(jī)的低速性能;位置控制系統(tǒng)中的高精度定位。6:解決齒槽轉(zhuǎn)矩脈動(dòng)問(wèn)題的方法?(1
2018-10-10 17:56:40
產(chǎn)生。齒槽轉(zhuǎn)矩是永磁電機(jī)特有的問(wèn)題之一,齒槽轉(zhuǎn)矩是永磁電機(jī)繞組不通電時(shí)永磁體和定子鐵心之間相互作用產(chǎn)生的轉(zhuǎn)矩,是由永磁體與電樞齒之間相互作用力的切向分量引起的。2:齒槽轉(zhuǎn)矩方向?在圓周方向產(chǎn)...
2021-09-01 06:53:35
電機(jī)額定轉(zhuǎn)速與額定轉(zhuǎn)矩怎么計(jì)算?電機(jī)額定轉(zhuǎn)矩作用是什么?
2021-10-08 06:55:58
電壓及頻率恒定條件下測(cè)試異步電機(jī)轉(zhuǎn)矩的方法由電機(jī)學(xué)知,異步電動(dòng)機(jī)的電磁轉(zhuǎn)矩為當(dāng)電源電壓及頻率保持恒定,異步電動(dòng)機(jī)在正常工作范圍內(nèi)運(yùn)轉(zhuǎn)時(shí),ω1 為常數(shù),E1 及cosφ2 的變化都很小,因而T 近似與I
2017-12-20 17:34:04
的電磁轉(zhuǎn)矩為當(dāng)電源電壓及頻率保持恒定,異步電動(dòng)機(jī)在正常工作范圍內(nèi)運(yùn)轉(zhuǎn)時(shí),ω1 為常數(shù),E1 及cosφ2 的變化都很小,因而T 近似與I′2 成正比。從電機(jī)學(xué)知識(shí)又知: 因此,如能引出正比于I0-
2018-01-19 11:06:12
某3相步進(jìn)電機(jī)的矩頻特性曲線所謂矩頻特性曲線,是指步進(jìn)電機(jī)扭矩與輸入信號(hào)頻率關(guān)系的曲線,其實(shí)相當(dāng)于其他電機(jī)如伺服電機(jī)的轉(zhuǎn)矩-轉(zhuǎn)速特性曲線。從曲線上可以看出,隨著輸入頻率的升高,步進(jìn)電機(jī)扭矩下降很快
2016-01-18 14:07:53
細(xì)分原理二相混合式步進(jìn)電機(jī)電磁轉(zhuǎn)矩方程p-轉(zhuǎn)子級(jí)數(shù);Zr-轉(zhuǎn)子齒數(shù)Zr=2*p;Ta-a相電磁轉(zhuǎn)矩;Tb-b相電磁轉(zhuǎn)矩;Td-定位矩(關(guān)于二相混合式步進(jìn)電機(jī)的數(shù)學(xué)模型可參見我的另一篇博客https
2021-07-08 09:59:07
交流電機(jī)的堵轉(zhuǎn)轉(zhuǎn)矩是否為電機(jī)的轉(zhuǎn)矩極限,此時(shí),電機(jī)輸出功率如何計(jì)算,是否為電機(jī)最大功率
2023-12-12 07:17:20
什么叫步進(jìn)電機(jī)的牽入轉(zhuǎn)矩(pull in torque)?答:動(dòng)態(tài)力矩,即在一定步進(jìn)速率下電機(jī)所產(chǎn)生的力矩。動(dòng)態(tài)力矩一般由PULL IN(牽入)力矩或PULL OUT(牽出)力矩所表示。PULL
2021-07-07 07:34:28
什么是轉(zhuǎn)矩波動(dòng)?轉(zhuǎn)矩波動(dòng)對(duì)電機(jī)運(yùn)行有什么影響?轉(zhuǎn)矩波動(dòng)的測(cè)試方式有哪幾種?
2021-05-07 06:16:19
請(qǐng)問(wèn)大俠們,伺服電機(jī)的 “堵轉(zhuǎn)轉(zhuǎn)矩”是什么意思,是最大轉(zhuǎn)矩的意思么?我選型的時(shí)候是根據(jù) “額定轉(zhuǎn)矩”還是“堵轉(zhuǎn)轉(zhuǎn)矩”來(lái)選呢?然后 電機(jī)的 “靜態(tài)電流”是什么意思?說(shuō)要根據(jù) 電機(jī) 的“靜態(tài)電流”來(lái)選擇電機(jī)模塊,如何解釋啊?
2023-12-11 07:01:07
伺服電機(jī)的轉(zhuǎn)矩控制模式是什么意思?伺服電機(jī)的轉(zhuǎn)矩控制模式有何作用?
2021-10-08 07:06:16
當(dāng)應(yīng)用場(chǎng)景需要精確的控制位置、速度及扭矩(或兩者結(jié)合)時(shí),一般使用伺服電機(jī)系統(tǒng)。根據(jù)所控制的參數(shù),伺服電機(jī)系統(tǒng)可以在轉(zhuǎn)矩模式、速度模式或位置模式下運(yùn)行。每種模式都需要控制回路,這些回路受到伺服
2023-03-10 10:03:48
和輸出之比所解釋的技術(shù)術(shù)語(yǔ),現(xiàn)在直接使用增益來(lái)表示。1.相對(duì)運(yùn)動(dòng):必需對(duì)位置值加以計(jì)算,點(diǎn)動(dòng)運(yùn)行、往返運(yùn)動(dòng)一定位置量的控制系統(tǒng)。2.絕對(duì)運(yùn)動(dòng):直接下達(dá)位置值,可用于XY軸、table等,一般的機(jī)械均可使用。于指令程序中較為簡(jiǎn)便。:干貨 | 伺服電機(jī)速度、位置、轉(zhuǎn)矩控制的比較
2018-10-11 10:29:54
最大轉(zhuǎn)矩電流比的原理是什么?如何對(duì)永磁同步電機(jī)MTPA最大轉(zhuǎn)矩電流比控制進(jìn)行仿真?
2021-10-09 09:38:17
像我們的普通的變頻電機(jī),在50HZ以下都是恒轉(zhuǎn)矩調(diào)速,哪位老師知道,可不可以通過(guò)設(shè)置變頻器的哪些參數(shù),來(lái)稍微提高以下50HZ以下的轉(zhuǎn)矩。
2023-12-13 08:58:47
查找了好多文獻(xiàn),發(fā)現(xiàn)都是對(duì)無(wú)刷直流電機(jī)進(jìn)行轉(zhuǎn)矩控制,我現(xiàn)在想要對(duì)有刷直流電機(jī)進(jìn)行轉(zhuǎn)矩控制,比如根據(jù)不同負(fù)載的大小輸出不同大小的轉(zhuǎn)矩,可以實(shí)現(xiàn)嗎?應(yīng)該怎樣解決?對(duì)轉(zhuǎn)矩進(jìn)行控制與有刷和無(wú)刷有關(guān)嗎?跪求看到帖子的大神解救我這個(gè)小白!!!
2019-08-06 12:19:36
誰(shuí)能告訴我開關(guān)磁阻電機(jī)瞬態(tài)轉(zhuǎn)矩控制與直接轉(zhuǎn)矩控制區(qū)別?謝謝大神。如何研究瞬態(tài)轉(zhuǎn)矩控制呢?
2015-12-28 16:41:26
請(qǐng)問(wèn)勵(lì)磁電流與轉(zhuǎn)矩電流的概念是???之間有什么關(guān)系,對(duì)電機(jī)有什么影響啊
2023-12-13 07:29:21
本篇文章為異步電機(jī)直接轉(zhuǎn)矩控制simulink仿真教程。目錄異步電機(jī)直接轉(zhuǎn)矩控制(Asynchronous DTC)完整仿真框圖異步電機(jī)模塊磁鏈計(jì)算模塊內(nèi)部結(jié)構(gòu)轉(zhuǎn)矩計(jì)算模塊內(nèi)部結(jié)構(gòu)磁鏈滯環(huán)比較模塊
2021-09-06 06:16:21
永磁電機(jī)直接轉(zhuǎn)矩的詳細(xì)原理可以自行理解,不懂可以參考其他文章或者聯(lián)系我。目錄永磁同步電機(jī)直接轉(zhuǎn)矩控制(PMSM-DTC)simulink仿真整體框圖永磁同步電機(jī)電機(jī)模塊磁鏈和轉(zhuǎn)矩滯環(huán)比較模塊轉(zhuǎn)速環(huán)
2021-08-27 07:41:22
電動(dòng)機(jī)、轉(zhuǎn)矩傳感器和被測(cè)電動(dòng)機(jī)固連載同一軸線上,通過(guò)控制脈沖數(shù)使步進(jìn)電動(dòng)機(jī)精確地將被試電機(jī)轉(zhuǎn)子旋轉(zhuǎn)一定角度后,步進(jìn)電動(dòng)機(jī)利用自身的保持轉(zhuǎn)矩作為轉(zhuǎn)矩傳感器的一個(gè)固定端,這樣齒槽轉(zhuǎn)矩就作用在轉(zhuǎn)矩傳感器上,從
2018-11-01 11:13:11
忽略工藝影響,永磁直流無(wú)刷電機(jī)的轉(zhuǎn)矩波動(dòng)主要包括槽引起的齒槽轉(zhuǎn)矩、電流換向引起的轉(zhuǎn)矩波動(dòng)、電磁因素引起的轉(zhuǎn)矩波動(dòng)、電樞反應(yīng)引超的轉(zhuǎn)矩波動(dòng)。
2020-04-12 16:32:23
的前提下,通過(guò)控制電機(jī)的瞬時(shí)電壓輸入來(lái)控制電機(jī)定子磁鏈的瞬時(shí)旋轉(zhuǎn)速度,來(lái)改變它對(duì)轉(zhuǎn)子的瞬時(shí)轉(zhuǎn)差率,達(dá)到直接控制電機(jī)輸出的目的。 在直接轉(zhuǎn)矩控制中,電機(jī)定子磁鏈的幅值通過(guò)上述電壓的矢量控制而保持為額定值
2016-01-20 10:37:18
矢量控制是怎樣改善電機(jī)的輸出轉(zhuǎn)矩能力的? 1、轉(zhuǎn)矩提升 此功能增加變頻器的輸出電壓(主要是低頻時(shí)),以補(bǔ)償定子電阻上電壓降引起的輸出轉(zhuǎn)矩損失,從而改善電機(jī)的輸出轉(zhuǎn)矩。 2 、改善電機(jī)低速輸出轉(zhuǎn)矩
2016-01-29 10:05:03
齒槽轉(zhuǎn)矩(cogging torque)有誰(shuí)產(chǎn)生?齒槽轉(zhuǎn)矩是否受定子電流影響?齒槽轉(zhuǎn)矩對(duì)電機(jī)性能的影響?解決齒槽轉(zhuǎn)矩脈動(dòng)問(wèn)題的方法有哪些?
2021-10-29 07:40:01
pwm占空比會(huì)影響步進(jìn)電機(jī)的轉(zhuǎn)矩嗎?
2023-06-25 07:13:27
請(qǐng)問(wèn)大家,電機(jī)轉(zhuǎn)矩等級(jí)是什么意思呢?怎么恒量它。
2023-12-27 07:02:00
讀出電機(jī)的轉(zhuǎn)矩電流給定值跟實(shí)際轉(zhuǎn)矩電流可以換算成哪些關(guān)于電機(jī)的量?還有哪位大佬有關(guān)于轉(zhuǎn)矩電流比較清楚的資料?
2019-01-16 02:56:40
前言:閑來(lái)無(wú)事,看了看電機(jī)負(fù)載轉(zhuǎn)矩觀測(cè)及前饋補(bǔ)償?shù)奈恼拢l(fā)現(xiàn)可以把電機(jī)的負(fù)載轉(zhuǎn)矩給觀測(cè)出來(lái)同時(shí)將觀測(cè)出來(lái)的負(fù)載轉(zhuǎn)矩作為干擾給前饋補(bǔ)償回去,這樣可以顯著地提高電機(jī)轉(zhuǎn)速的平穩(wěn)性。用了五天時(shí)間看懂負(fù)載轉(zhuǎn)矩
2021-08-27 08:19:22
本文介紹了一種電機(jī)轉(zhuǎn)矩在線測(cè)量系統(tǒng)的結(jié)構(gòu)原理和設(shè)計(jì)要點(diǎn)。該系統(tǒng)采用普通交流電機(jī)作為負(fù)載,對(duì)待測(cè)調(diào)速電機(jī)進(jìn)行轉(zhuǎn)矩測(cè)量。采用單片機(jī)對(duì)負(fù)載電機(jī)電流及待測(cè)電機(jī)轉(zhuǎn)速進(jìn)行
2009-09-14 15:45:37 50
50 摘 要:本文通過(guò)合理選擇步進(jìn)電機(jī)相繞組細(xì)分電流波形,提出并介紹了基于80C196MC單片機(jī)控制的步進(jìn)電機(jī)恒轉(zhuǎn)矩斬波恒流細(xì)分驅(qū)動(dòng)方案、技術(shù)實(shí)現(xiàn)及其應(yīng)用。引言步進(jìn)電
2006-03-11 13:47:08 628
628 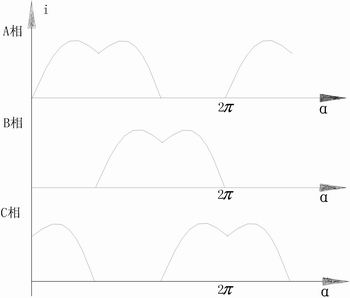
什么是保持轉(zhuǎn)矩(HOLDING TORQUE)?
保持轉(zhuǎn)矩(HOLDING TORQUE)是指步進(jìn)電機(jī)通電但沒有轉(zhuǎn)動(dòng)時(shí),定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機(jī)最重
2010-01-09 14:21:049751 
步進(jìn)電機(jī)的保持轉(zhuǎn)矩,近似于傳統(tǒng)電機(jī)所稱的“功率”。當(dāng)然,有著本質(zhì)的區(qū)別。步進(jìn)電機(jī)的物理結(jié)構(gòu),完全不同于交流、直流電機(jī),步進(jìn)電機(jī)的輸出功率是可變的。
2010-06-12 08:19:261036 基于SVPWM的無(wú)刷雙饋電機(jī)直接轉(zhuǎn)矩控制
2016-04-18 10:28:4618 永磁同步電機(jī)直接轉(zhuǎn)矩控制轉(zhuǎn)矩脈動(dòng)的產(chǎn)生及其抑制方法綜述
2017-01-21 12:00:292 交流電機(jī)直接轉(zhuǎn)矩控制
2017-01-21 11:54:391 異步電機(jī)的直接轉(zhuǎn)矩控制
2017-01-21 11:54:396 基于滑模的直接轉(zhuǎn)矩控制車用驅(qū)動(dòng)電機(jī)的研究
2017-01-21 11:49:350 電機(jī)轉(zhuǎn)矩就是電機(jī)轉(zhuǎn)動(dòng)的力量大小,轉(zhuǎn)矩波動(dòng)不僅引發(fā)電機(jī)本體振動(dòng),連帶電機(jī)直接或間接接觸的部件都會(huì)振動(dòng)。轉(zhuǎn)矩波動(dòng)(Torque ripple)的主要來(lái)源有:轉(zhuǎn)矩電流波動(dòng)、齒槽力矩、加工工藝等。
2017-03-13 10:33:4112915 恒轉(zhuǎn)矩電機(jī)就是通過(guò)伺服控制使其輸出轉(zhuǎn)矩恒定不變(類似的常見的穩(wěn)速電機(jī)就是通過(guò)司服控制使其速度恒定不變)水泵使用恒轉(zhuǎn)矩電機(jī)就是要讓輸出水壓保持恒定不變。
2017-11-12 10:44:051189 子磁場(chǎng)定向方式,對(duì)定子磁鏈和電磁轉(zhuǎn)矩進(jìn)行直接控制的。這種方法不需要復(fù)雜的坐標(biāo)變換,而是直接在電機(jī)定子坐標(biāo)上計(jì)算磁鏈的模和轉(zhuǎn)矩的大小,并通過(guò)磁鏈和轉(zhuǎn)矩的直接跟蹤實(shí)現(xiàn)PWM脈寬調(diào)制和系統(tǒng)的高動(dòng)態(tài)性能。
2017-11-23 15:58:143904 Halbach永磁陣列具有靈活配置電機(jī)氣隙磁通密度、磁屏蔽的特點(diǎn),將其用于無(wú)刷直流電機(jī)以增加電磁轉(zhuǎn)矩、降低齒槽轉(zhuǎn)矩。在保角變換求解電磁場(chǎng)基礎(chǔ)上,給出無(wú)刷直流電機(jī)電磁轉(zhuǎn)矩與齒槽轉(zhuǎn)矩的解析計(jì)算模型,通過(guò)
2018-01-15 11:05:527 為了減小定位力矩對(duì)磁通切換永磁( FSPM)電機(jī)性能的影響,提出了一種考慮定位力矩補(bǔ)償功能的模型預(yù)測(cè)轉(zhuǎn)矩控制( MPTC)方法。通過(guò)有限元分析獲得FSPM電機(jī)定位力矩主要諧波的數(shù)學(xué)表達(dá)式,根據(jù)補(bǔ)償
2018-01-17 17:17:360 在SINAMICS V90的轉(zhuǎn)矩控制模式(T)下,電機(jī)將以設(shè)定的轉(zhuǎn)矩進(jìn)行輸出。一般情況下,轉(zhuǎn)矩控制的電機(jī)需要配合速度控制的電機(jī)使用,以實(shí)現(xiàn)對(duì)生產(chǎn)線張力等的控制。 在單獨(dú)使用轉(zhuǎn)矩控制時(shí),如果電機(jī)輸出
2018-03-16 10:40:549 軸向磁通永磁同步電機(jī)的電磁場(chǎng)呈三維分布,其轉(zhuǎn)矩的精確建模和優(yōu)化通常需要采用三維有限元方法,但這非常耗時(shí)。提出一種轉(zhuǎn)矩解析計(jì)算模型,并基于該模型對(duì)軸向磁通永磁同步電機(jī)的轉(zhuǎn)矩展開優(yōu)化。首先,通過(guò)磁通密度
2018-03-20 18:22:431 本應(yīng)用筆記介紹高轉(zhuǎn)矩雙極性步進(jìn)電機(jī)的驅(qū)動(dòng)器解決方案。Microchip的PIC16F1776/9提供了功能豐富的外設(shè),支持使用兩個(gè)H橋開關(guān)控制不同驅(qū)動(dòng)技術(shù),實(shí)現(xiàn)高功率和低功率步進(jìn)電機(jī)、恒定轉(zhuǎn)矩或高轉(zhuǎn)矩微步、電流限制、電機(jī)步進(jìn)速率設(shè)置和電機(jī)故障事件檢測(cè)。
2018-06-13 08:27:0015 日常工作中,經(jīng)常聽到"轉(zhuǎn)矩"這個(gè)詞兒,什么是電機(jī)的轉(zhuǎn)矩呢?使機(jī)械元件轉(zhuǎn)動(dòng)的力矩稱為轉(zhuǎn)動(dòng)力矩,簡(jiǎn)稱轉(zhuǎn)矩。
2019-02-22 08:36:1979288 額定電壓(電流)驅(qū)動(dòng):參見前文《步進(jìn)電機(jī)的靜態(tài)轉(zhuǎn)矩特性及測(cè)量方法》一文的下圖,從額定電壓降低電壓來(lái)驅(qū)動(dòng)步進(jìn)電機(jī),發(fā)現(xiàn)位置定位精度變差。
2019-10-07 16:17:002130 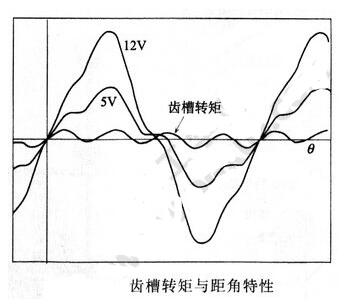
步進(jìn)電機(jī)的線圈通直流電時(shí),帶負(fù)載轉(zhuǎn)子的電磁轉(zhuǎn)矩(與負(fù)載轉(zhuǎn)矩平衡而產(chǎn)生的恢復(fù)電磁轉(zhuǎn)矩稱為靜態(tài)轉(zhuǎn)矩或靜止轉(zhuǎn)矩)與轉(zhuǎn)子功率角的關(guān)系稱為角度-靜止轉(zhuǎn)矩特性,這就是電機(jī)的靜態(tài)特性。
2019-10-08 15:36:133881 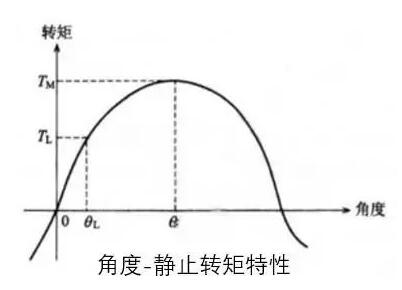
POWERMAX P 和 M 系列步進(jìn)電機(jī)為NEMA 23 (60 mm) 步進(jìn)電機(jī)設(shè)定標(biāo)準(zhǔn)值。 可提供半疊片、單疊片和雙疊片配置,保持轉(zhuǎn)矩從42至253 oz-in。 M系列電機(jī)采用SIGMAX?技術(shù),以獲得更高的轉(zhuǎn)矩和加速度。
2019-10-29 08:00:0011 根據(jù)轉(zhuǎn)矩的不同情況,可以采取不同的轉(zhuǎn)矩測(cè)量方法。轉(zhuǎn)矩=9550*功率/轉(zhuǎn)速同樣功率=轉(zhuǎn)速*轉(zhuǎn)矩/9550平衡方程式中:功率的單位(kW);轉(zhuǎn)速的單位(r/min);轉(zhuǎn)矩的單位(N.m);9550是計(jì)算系數(shù)。
2019-11-15 09:16:0411125 電機(jī)的額定轉(zhuǎn)矩表示額定條件下電機(jī)軸端輸出轉(zhuǎn)矩。轉(zhuǎn)矩等于力與力臂或力偶臂的乘積,在國(guó)際單位制(SI)中,轉(zhuǎn)矩的計(jì)量單位為牛頓?米(N?m),工程技術(shù)中也曾用過(guò)公斤力?米等作為轉(zhuǎn)矩的計(jì)量單位。電機(jī)軸端輸出轉(zhuǎn)矩等于轉(zhuǎn)子輸出的機(jī)械功率除以轉(zhuǎn)子的機(jī)械角速度。
2019-11-15 09:40:0116207 提高驅(qū)動(dòng)電路的電壓:要維持高速時(shí)的大轉(zhuǎn)矩,就要保持電流不變,使斬波器工作在恒電流狀態(tài)。要使電流恒定,只能提高脈沖頻率。當(dāng)步進(jìn)電機(jī)輸出轉(zhuǎn)速到達(dá)一定高的速度時(shí),由于電壓限制,只能工作在恒電壓狀態(tài),如果提高輸入電壓,則可以使其在高速時(shí)依然能工作在恒電流狀態(tài),從而提高高速時(shí)的轉(zhuǎn)矩。
2019-12-10 09:30:315490 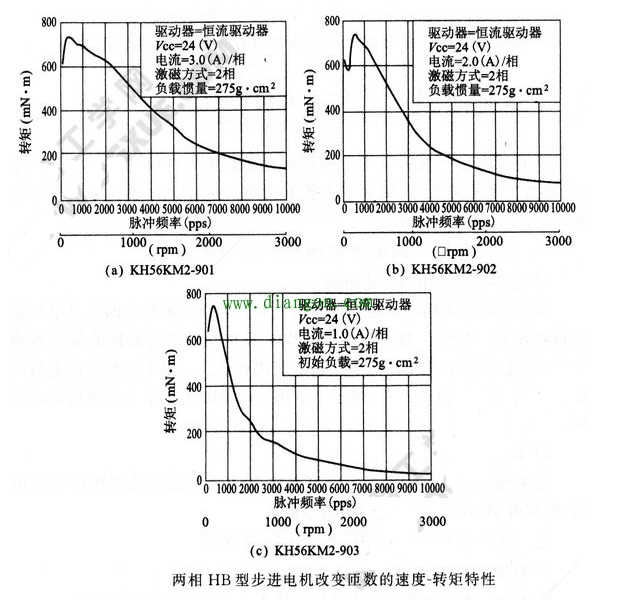
步進(jìn)電機(jī)的線圈通直流電時(shí),帶負(fù)載轉(zhuǎn)子的電磁轉(zhuǎn)矩(與負(fù)載轉(zhuǎn)矩平衡而產(chǎn)生的恢復(fù)電磁轉(zhuǎn)矩稱為靜態(tài)轉(zhuǎn)矩或靜止轉(zhuǎn)矩)與轉(zhuǎn)子功率角的關(guān)系稱為角度-靜止轉(zhuǎn)矩特性,這就是電機(jī)的靜態(tài)特性。
2019-12-11 09:02:0510552 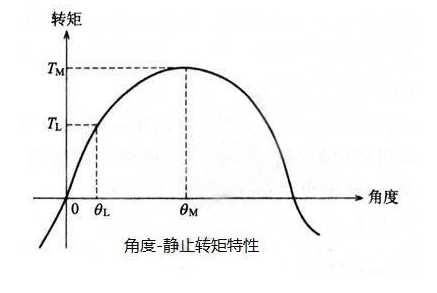
電磁轉(zhuǎn)矩應(yīng)該是電機(jī)理論轉(zhuǎn)矩,忽略摩擦定因素輸出轉(zhuǎn)矩。電機(jī)的輸出轉(zhuǎn)矩就是電機(jī)的電磁轉(zhuǎn)矩減去電機(jī)的摩擦輸出的轉(zhuǎn)矩。負(fù)載轉(zhuǎn)矩就是電機(jī)經(jīng)減速機(jī)等作用到負(fù)載的轉(zhuǎn)矩。
2020-01-15 14:46:2029816 非換相相電流的變動(dòng)導(dǎo)致?lián)Q相轉(zhuǎn)矩波動(dòng),電流反饋調(diào)節(jié)方法就是使換相相電流保持恒定,從面使換相轉(zhuǎn)矩波動(dòng)為零。
2020-04-03 10:44:471938 轉(zhuǎn)矩密度是衡量低速大轉(zhuǎn)矩直驅(qū)電機(jī)的關(guān)鍵指標(biāo)之一,本文主要從結(jié)構(gòu)特點(diǎn)、應(yīng)用現(xiàn)狀和科研進(jìn)展等方面,介紹了真分?jǐn)?shù)槽集中繞組永磁電機(jī)、永磁游標(biāo)電機(jī)、永磁盤式電機(jī)、橫向磁通電機(jī)和雙定子/雙轉(zhuǎn)子電機(jī)等幾類高轉(zhuǎn)矩密度低速大轉(zhuǎn)矩永磁直驅(qū)電機(jī)。概述了轉(zhuǎn)矩脈動(dòng)、氣隙偏心故障、機(jī)械強(qiáng)度和溫度場(chǎng)研究等的必要性和方法。
2020-12-14 20:28:53460 轉(zhuǎn)矩密度是衡量低速大轉(zhuǎn)矩直驅(qū)電機(jī)的關(guān)鍵指標(biāo)之一,本文主要從結(jié)構(gòu)特點(diǎn)、應(yīng)用現(xiàn)狀和科研進(jìn)展等方面,介紹了真分?jǐn)?shù)槽集中繞組永磁電機(jī)、永磁游標(biāo)電機(jī)、永磁盤式電機(jī)、橫向磁通電機(jī)和雙定子/雙轉(zhuǎn)子電機(jī)等幾類高轉(zhuǎn)矩密度低速大轉(zhuǎn)矩永磁直驅(qū)電機(jī)。概述了轉(zhuǎn)矩脈動(dòng)、氣隙偏心故障、機(jī)械強(qiáng)度和溫度場(chǎng)研究等的必要性和方法。
2021-01-20 15:16:305 給出一種感應(yīng)電機(jī)離散空間矢量調(diào)制直接轉(zhuǎn)矩控制(DSⅤMDTC)的數(shù)字實(shí)現(xiàn)方法,詳細(xì)闡述了以們公司的TMs320F2812作為控制器核心的直接轉(zhuǎn)矩變頻調(diào)速系統(tǒng)的軟、硬件設(shè)計(jì)方案。實(shí)驗(yàn)結(jié)果表明,DSVM技術(shù)可有效減小轉(zhuǎn)矩脈動(dòng),改善電流和磁鏈波形,且保持了一般直接轉(zhuǎn)矩控制方法轉(zhuǎn)矩動(dòng)態(tài)響應(yīng)快的優(yōu)點(diǎn)。
2021-05-11 10:38:5216 “牽入轉(zhuǎn)矩特性”也稱為“啟動(dòng)轉(zhuǎn)矩特性”,表示可以使停止?fàn)顟B(tài)的步進(jìn)電機(jī)啟動(dòng)的頻率(脈沖頻率)與負(fù)載轉(zhuǎn)矩之間的關(guān)系。牽入轉(zhuǎn)矩曲線內(nèi)的區(qū)域稱為“自啟動(dòng)區(qū)域”,是可以啟動(dòng)、停止和反轉(zhuǎn)的區(qū)域。另外,將負(fù)載轉(zhuǎn)矩為零的頻率=可以啟動(dòng)步進(jìn)電機(jī)的極限頻率稱為“最大自啟動(dòng)頻率”。如圖所示,頻率越高,可啟動(dòng)的負(fù)載轉(zhuǎn)矩越低。
2021-06-12 16:27:005566 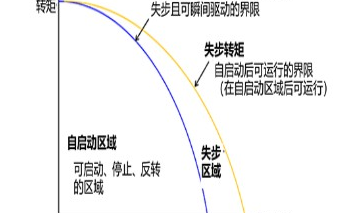
下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2021-06-13 17:46:324193 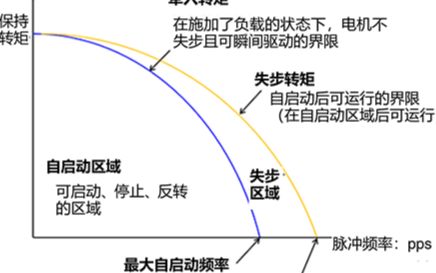
本文將介紹步進(jìn)電機(jī)的基本特性。步進(jìn)電機(jī)的基本特性:下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2023-02-24 09:51:101168 
另外,步進(jìn)電機(jī)的牽入轉(zhuǎn)矩特性和失步轉(zhuǎn)矩特性會(huì)因勵(lì)磁方法和驅(qū)動(dòng)電路而異。因此,對(duì)步進(jìn)電機(jī)的特性研究中,需要進(jìn)行包括驅(qū)動(dòng)方法和電路在內(nèi)的整體評(píng)估。
2023-03-09 11:52:28454 
步距角小的步進(jìn)電機(jī)能獲得高轉(zhuǎn)矩。實(shí)際上HB塑轉(zhuǎn)子齒數(shù)如為50齒,永久磁鐵的漏磁將增加,但不會(huì)成比例,此結(jié)論在100齒以下均有效。三相HB型步進(jìn) 電機(jī)從1. 2°(轉(zhuǎn)子50齒)改為0. 6°(轉(zhuǎn)子100齒),約增加1. 4至L 8倍的低速轉(zhuǎn)矩。
2023-03-21 15:03:520 步進(jìn)電機(jī)基礎(chǔ)(3.2)-步進(jìn)電機(jī)的原理與特性之基本特性 前言 基本信息 公式 前言說(shuō)明 基本特性 1. 靜態(tài)轉(zhuǎn)矩特性 2. 動(dòng)態(tài)轉(zhuǎn)矩特性 1) 脈沖頻率-轉(zhuǎn)矩特性 2) 脈沖頻率-慣量特性3. 暫態(tài)
2023-03-23 13:51:012 制動(dòng)轉(zhuǎn)矩是阻礙電機(jī)啟動(dòng)的轉(zhuǎn)矩,需要通過(guò)有效抑制發(fā)電制動(dòng)轉(zhuǎn)矩和脈動(dòng)轉(zhuǎn)矩,才能夠使電機(jī)起動(dòng)能力得到顯著增強(qiáng)。電機(jī)極對(duì)數(shù)不同,制動(dòng)轉(zhuǎn)矩也不同。
2023-03-27 14:56:174769 電磁轉(zhuǎn)矩是電動(dòng)機(jī)中最基本、最常見的轉(zhuǎn)矩形式,常見的如直流電機(jī)、交流異步電機(jī)、交流同步電機(jī)等都是通過(guò)不同的電磁轉(zhuǎn)矩原理實(shí)現(xiàn)轉(zhuǎn)動(dòng)。電磁轉(zhuǎn)矩大小與電流、磁場(chǎng)強(qiáng)度等有關(guān),因此在設(shè)計(jì)電機(jī)時(shí)通常要考慮這些因素并進(jìn)行合理的匹配。
2023-03-28 14:08:281486 電磁轉(zhuǎn)矩是指在電動(dòng)機(jī)中通過(guò)電流產(chǎn)生的磁場(chǎng)和磁場(chǎng)中的磁極相互作用形成的轉(zhuǎn)矩。它的大小取決于線圈中的電流和磁場(chǎng)的強(qiáng)度。而輸出轉(zhuǎn)矩則是指電機(jī)輸出的機(jī)械轉(zhuǎn)矩減去負(fù)載阻力和慣性等因素的影響后的實(shí)際轉(zhuǎn)矩。
2023-03-28 14:19:443361 穩(wěn)定電機(jī)運(yùn)行:電磁轉(zhuǎn)矩的大小與線圈中的電流和磁場(chǎng)的強(qiáng)度相關(guān),因此在電動(dòng)機(jī)工作時(shí),需要通過(guò)合理地調(diào)節(jié)電磁裝置參數(shù)來(lái)保持電磁轉(zhuǎn)矩的穩(wěn)定,從而保證機(jī)器平穩(wěn)運(yùn)行。
2023-03-28 14:47:411119 伺服電機(jī)泛指各種帶有編碼器結(jié)構(gòu),可以進(jìn)行運(yùn)動(dòng)狀態(tài)反饋的電機(jī)系統(tǒng)。我們?cè)谶M(jìn)行伺服電機(jī)選型時(shí),最關(guān)注的無(wú)外乎電機(jī)的轉(zhuǎn)速轉(zhuǎn)矩以及位移精度等等。當(dāng)然,電機(jī)的可靠性穩(wěn)定性也是十分重要的。電機(jī)的轉(zhuǎn)矩越大,說(shuō)明
2023-04-07 07:10:04996 我們?cè)谶x擇伺服電機(jī)的時(shí)候,最關(guān)心的參數(shù)便是額定轉(zhuǎn)速以及額定轉(zhuǎn)矩。那么,它們之間的關(guān)系是怎么的呢?它們之間如何進(jìn)行換算呢?簡(jiǎn)單說(shuō)一下。 先說(shuō)關(guān)系,電機(jī)的轉(zhuǎn)速與轉(zhuǎn)矩是成反比例關(guān)系的,轉(zhuǎn)速越高,轉(zhuǎn)矩越小
2023-05-20 12:55:013799 電機(jī)轉(zhuǎn)矩分為電磁轉(zhuǎn)矩和磁阻轉(zhuǎn)矩。本期,從能量的角度來(lái)聊聊什么是電磁轉(zhuǎn)矩和磁阻轉(zhuǎn)矩,盡量讓大家不通過(guò)死記硬背學(xué)知識(shí)。
2023-07-14 17:31:281096 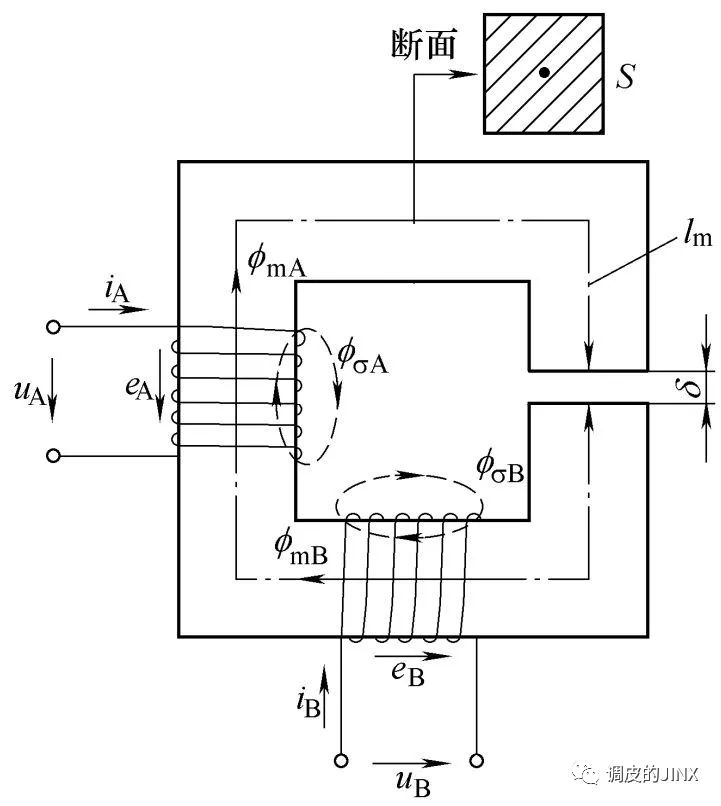
? ?齒槽轉(zhuǎn)矩是永磁電機(jī)繞組不通電時(shí)永磁體與定子鐵心之間相互作用產(chǎn)生的轉(zhuǎn)矩,是永磁體與定子齒之間相互作用力的切向分量的脈動(dòng)引起的。當(dāng)電機(jī)轉(zhuǎn)子旋轉(zhuǎn)時(shí),永磁體兩側(cè)面對(duì)應(yīng)定子齒槽的一小段范圍內(nèi)磁導(dǎo)發(fā)生較大
2023-08-30 09:18:541977 
每種型號(hào)步進(jìn)電機(jī)的規(guī)格里均有最大靜止轉(zhuǎn)矩及電機(jī)慣量等參數(shù),各項(xiàng)參數(shù)與負(fù)載轉(zhuǎn)矩及負(fù)載慣量間必定有相關(guān)聯(lián)系存在,選用步進(jìn)電機(jī)時(shí)應(yīng)考慮負(fù)載機(jī)構(gòu)的運(yùn)動(dòng)條件要求,如加速度的快慢、機(jī)構(gòu)的重量、機(jī)構(gòu)的運(yùn)動(dòng)方式
2023-09-08 08:08:42388 
三菱伺服電機(jī)的轉(zhuǎn)矩極限值調(diào)節(jié)對(duì)于實(shí)現(xiàn)電機(jī)的最佳性能和保護(hù)電機(jī)的安全運(yùn)行至關(guān)重要。調(diào)節(jié)轉(zhuǎn)矩極限值可以根據(jù)具體的應(yīng)用需求來(lái)優(yōu)化伺服系統(tǒng)的性能。本文將從以下幾個(gè)方面進(jìn)行詳細(xì)介紹:首先是調(diào)節(jié)轉(zhuǎn)矩極限值的背景
2023-12-28 17:47:09724 轉(zhuǎn)矩模式下如何控制電機(jī)速度 在轉(zhuǎn)矩模式下,控制電機(jī)速度的基本原理是將轉(zhuǎn)矩需求轉(zhuǎn)換為相應(yīng)的電流輸出,通過(guò)控制電機(jī)的電流來(lái)實(shí)現(xiàn)轉(zhuǎn)速控制。以下是一般的步驟和方法: 1. 設(shè)定轉(zhuǎn)矩需求:根據(jù)應(yīng)用需求,設(shè)定
2024-02-21 17:53:35453
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論