 電子發(fā)燒友App
電子發(fā)燒友App


伺服驅(qū)動器是一種電子設(shè)備,它通過向伺服電機提供適當?shù)?a target="_blank">信號控制其轉(zhuǎn)動,從而實現(xiàn)對控制工件位置、速度、加速度等多種運動參數(shù)的精確控制。它廣泛應(yīng)用于工業(yè)生產(chǎn)自動化領(lǐng)域的運動控制系統(tǒng)中,比如橡膠、塑料、紙張、印刷、包裝、木工、石材、玻璃、金屬、電子等產(chǎn)業(yè)中。
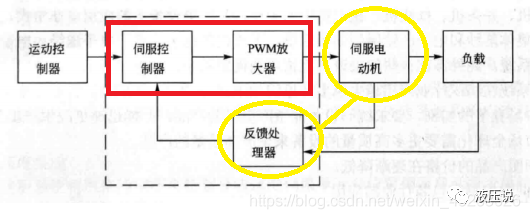
伺服驅(qū)動器的工作原理主要由以下幾個部分組成:
1. 控制器:控制器主要由數(shù)字信號處理器(DSP)和控制算法構(gòu)成,用于計算電機的位置、速度和加速度等控制參數(shù),然后向伺服驅(qū)動器輸出調(diào)制的PWM信號。
2. 伺服電機:伺服電機是一種交流電機,通過接收伺服驅(qū)動器的PWM信號控制轉(zhuǎn)子的位置、速度和加速度等參數(shù),實現(xiàn)精準運動控制。
3. 傳感器:傳感器主要用于反饋電機的位置和速度信息,包括編碼器、霍爾元器件、磁編碼盤等。
4. 伺服驅(qū)動器:伺服驅(qū)動器主要由功率放大器、測速電路、反饋電路、保護電路等部分組成,主要作用是根據(jù)控制器輸出的PWM信號,將電能轉(zhuǎn)換為機械能,控制電機的速度和位置。
總之,伺服驅(qū)動器通過控制器、電機和傳感器等主要部件的協(xié)調(diào)作用,完成對電機的位置、速度的精確控制和調(diào)節(jié),以實現(xiàn)各種需要精準控制的應(yīng)用領(lǐng)域的工作過程。
伺服系統(tǒng)的概念和工作原理
伺服系統(tǒng)是一種實現(xiàn)精密運動控制的系統(tǒng),通常用于需要高精度和高速運動的工業(yè)控制領(lǐng)域。其工作原理是對電機進行精確的控制,以實現(xiàn)精準的位移或速度調(diào)節(jié)。
伺服系統(tǒng)的基本組成部分包括電機、編碼器、控制器和調(diào)節(jié)器等。其中,電機負責(zé)驅(qū)動機械運動,編碼器用于實時測量運動的位置和速度,控制器通過輸入的控制信號計算出驅(qū)動電機的運動方式并控制電機運行,調(diào)節(jié)器則將控制信號與電機有關(guān)的參數(shù)進行調(diào)節(jié),以確保精準的控制。
在運行時,控制器接收編碼器信號,計算出實際位置和速度和目標位置和速度之間的誤差,然后根據(jù)PID控制算法計算出要輸出的控制信號,并將其發(fā)送到調(diào)節(jié)器,使其通過電機驅(qū)動電機執(zhí)行相應(yīng)的運動。
總之,伺服系統(tǒng)是一種實現(xiàn)高精度、高速度運動控制的系統(tǒng),其包括電機、編碼器、控制器和調(diào)節(jié)器等部分,通過對電機的精確控制,以實現(xiàn)對運動的精準調(diào)節(jié)。伺服系統(tǒng)在自動控制、機器人化生產(chǎn)、以及其他需要高精度和高速運動控制的領(lǐng)域有廣泛的應(yīng)用。
伺服驅(qū)動器和伺服系統(tǒng)的功能特點
伺服驅(qū)動器和伺服系統(tǒng)都是一種用于實現(xiàn)精準控制和運動的電氣設(shè)備,下面是它們各自的功能特點:
伺服驅(qū)動器的功能特點:
1. 可控性強:伺服驅(qū)動器具有非常高的可控性,可以通過接收控制信號來實現(xiàn)快速精準的運動控制。
2. 穩(wěn)定性好:伺服技術(shù)可以通過精準控制電機的轉(zhuǎn)速和位置,確保整個系統(tǒng)的穩(wěn)定性和精度。
3. 響應(yīng)速度快:伺服驅(qū)動器可以在極短的時間內(nèi)響應(yīng)控制信號并調(diào)整電機的運動狀態(tài)。
4. 編碼器反饋功能:伺服驅(qū)動器可以通過內(nèi)置的編碼器反饋功能,對電機的位置信息進行精準控制和調(diào)整。
伺服系統(tǒng)的功能特點:
1. 高精度運動控制:伺服系統(tǒng)基于伺服驅(qū)動器,可以實現(xiàn)非常高精度的運動控制,控制精度可以達到亞毫米級別。
2. 擴展性強:伺服系統(tǒng)可以進行靈活的配置和擴展,在不同的應(yīng)用場景中實現(xiàn)自動化、機械加工、物流運輸?shù)雀鞣N控制任務(wù)。
3. 易于使用:伺服系統(tǒng)提供友好的人機交互界面和操作方式,非常易于使用,可以幫助用戶快速掌握和應(yīng)用。
4. 高效節(jié)能:伺服系統(tǒng)采用先進的節(jié)能技術(shù),可以大幅減少能源消耗,降低系統(tǒng)的運行成本。
總之,伺服驅(qū)動器和伺服系統(tǒng)都具有高精度、高效率、高可控性等特點,可以廣泛地應(yīng)用于自動化、機械制造、機器人控制和物流運輸?shù)雀鱾€領(lǐng)域。
伺服驅(qū)動器和伺服系統(tǒng)的主要結(jié)構(gòu)
伺服驅(qū)動器的主要結(jié)構(gòu):
伺服驅(qū)動器作為一種重要的自動化控制設(shè)備,其主要結(jié)構(gòu)包括以下幾個部分:
1. 控制芯片:伺服驅(qū)動器的核心部分,控制芯片實現(xiàn)了對電機控制信號的解析和處理。 控制芯片的性能關(guān)系到伺服驅(qū)動器的響應(yīng)速度和控制精度。
2. 電源模塊:電源模塊主要用于向伺服電機供電,一般采用直流電源模塊,具有高效、穩(wěn)定的特點。
3. 信號采集模塊:信號采集模塊用于采集電機轉(zhuǎn)子的位置、速度、加速度等運動信息,并與目標數(shù)據(jù)(即需要控制的數(shù)據(jù))進行比較,從而產(chǎn)生控制信號。
4. 功率放大器:功率放大器是伺服驅(qū)動器的另一個核心部分,用于將控制信號轉(zhuǎn)換為電機的工作電壓和電流,實現(xiàn)對電機的控制。
5. 過熱保護電路:過熱保護電路用于保護伺服驅(qū)動器和電機,當驅(qū)動器或電機溫度過高時,會自動切斷電源,從而保護伺服驅(qū)動器和電機。
6. 控制面板:控制面板通常包括LED數(shù)碼管、按鍵、通訊口等,用于實現(xiàn)對伺服驅(qū)動器的控制和設(shè)置。
總之,伺服驅(qū)動器的主要結(jié)構(gòu)包括控制芯片、電源模塊、信號采集模塊、功率放大器、過熱保護電路和控制面板等部分。 通過這些組成部分的協(xié)同工作,伺服驅(qū)動器可以實現(xiàn)對電機的高精度控制和高速響應(yīng)。
伺服驅(qū)動系統(tǒng)的主要結(jié)構(gòu):
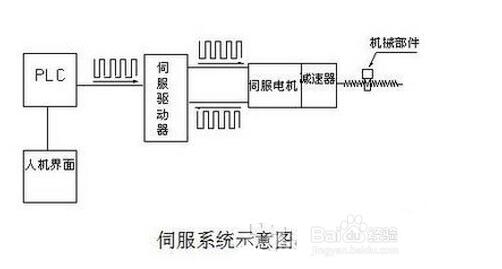
伺服驅(qū)動系統(tǒng)是由伺服驅(qū)動器、伺服電機、編碼器、控制器等部分組成的控制系統(tǒng)。下面分別介紹它們的主要結(jié)構(gòu)。
1. 伺服驅(qū)動器結(jié)構(gòu):
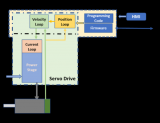
伺服驅(qū)動器是一種電力電子設(shè)備,主要由電源、控制電路、功率電路、保護電路等部分組成。其中,電源主要為整個系統(tǒng)提供電能;控制電路通過誤差放大器和PID等算法產(chǎn)生控制信號;功率電路則將控制信號轉(zhuǎn)換為適應(yīng)伺服電機的輸出信號。
2. 伺服電機結(jié)構(gòu):
伺服電機一般由直流電機和交流電機兩種類型組成,主要由轉(zhuǎn)子、定子、電樞線圈、永磁體等部分構(gòu)成。其主要作用是將控制信號轉(zhuǎn)化為機械動力,實現(xiàn)工件位置、速度和加速度等控制的精確調(diào)節(jié)。
3. 編碼器結(jié)構(gòu):
編碼器是一種用于檢測旋轉(zhuǎn)角度的裝置,主要由光柵、光電器、基板等部分組成。伺服系統(tǒng)使用編碼器反饋電機的位置和速度信息,以實現(xiàn)精確控制。
4. 控制器結(jié)構(gòu):
控制器主要用于控制伺服驅(qū)動器向伺服電機發(fā)出PWM調(diào)制信號,以控制電機的運動。其主要由AD轉(zhuǎn)換器、數(shù)字信號處理器(DSP)、輸入輸出接口等部分組成。控制器采用PID算法、模糊控制等技術(shù)根據(jù)反饋的位置和速度信息,計算電機控制參數(shù),對伺服驅(qū)動器輸出調(diào)制的PWM信號,實現(xiàn)對電機位置、速度和加速度等參數(shù)的精確控制調(diào)節(jié)。
伺服驅(qū)動系統(tǒng)通過以上幾個部分的有機組合,完成了控制系統(tǒng)對伺服電機的位置、速度的精確控制和調(diào)節(jié),以達到需要精準控制的應(yīng)用領(lǐng)域的工作過程的目的。
伺服驅(qū)動器和伺服系統(tǒng)的區(qū)別
伺服驅(qū)動器和伺服系統(tǒng)都是實現(xiàn)電機精準運動控制的系統(tǒng),它們之間的關(guān)系和區(qū)別如下:
1. 定義不同:
伺服驅(qū)動器是一種電子設(shè)備,通過向伺服電機提供適當?shù)碾娦盘杹砜刂破溥\動參數(shù),例如位置、速度和加速度等。而伺服系統(tǒng)是一個包括伺服驅(qū)動器、編碼器、控制器等多個部分的完整系統(tǒng),旨在實現(xiàn)對電機的高精度運動控制。
2. 范圍不同:
伺服驅(qū)動器的范圍僅限于控制驅(qū)動電機的電信號輸出,要實現(xiàn)完整的運動控制需要其他輔助部件,如編碼器、控制器等。伺服系統(tǒng)則包括完整的控制系統(tǒng),涵蓋了驅(qū)動電機、接受反饋信息、處理運動控制算法等多種功能。
3. 功能不同:
伺服驅(qū)動器主要是負責(zé)將數(shù)字輸入信號轉(zhuǎn)換為合適的驅(qū)動電機的電信號,使電機具備定速、定位、定準等運動控制功能。而伺服系統(tǒng)則將伺服驅(qū)動器與編碼器、控制器等多個部件實現(xiàn)完整的運動控制系統(tǒng),能夠精確控制大多種復(fù)雜的動作運動。
4. 應(yīng)用領(lǐng)域不同:
伺服驅(qū)動器廣泛應(yīng)用于機械、自動化、電子等領(lǐng)域中的各種需要精準控制的運動,例如物流裝置、印刷機、包裝機等;伺服系統(tǒng)則更多用于精密控制和要求更高的應(yīng)用場景,以模擬人體運動、智能家居控制、軌道交通設(shè)備等領(lǐng)域廣泛應(yīng)用。
綜上所述,伺服驅(qū)動器是伺服系統(tǒng)中的一個部分,主要是負責(zé)控制驅(qū)動電機的電信號輸出;而伺服系統(tǒng)則是將伺服驅(qū)動器與編碼器、控制器等多個部件結(jié)合成相互配合的完整控制系統(tǒng),實現(xiàn)對電機的高精度運動控制。
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論