 電子發燒友App
電子發燒友App


交流電機是將交流電能轉換為機械能的機械轉動器件。交流電機通過利用磁場轉動力的原理,將電能轉換為機械能,從而達到動力傳輸和機械工作的目的。
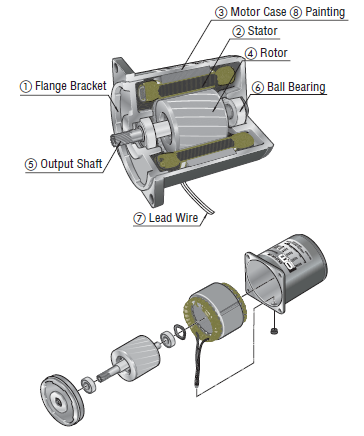
交流電機的基本原理是在電磁場的作用下,導體中的電流會受到力的作用,產生一個旋轉力矩,從而驅動電機轉動。交流電機通常由定子和轉子兩部分構成,其中定子部分通常由若干個發電機線圈和其它電磁設備構成,而轉子部分通常由通孔型或鱗片型端部等制成。
交流電機的工作原理基于電磁感應和磁場轉動力的相互作用。電機中由外接電源提供交流電,通過轉矩變形器在定子線圈中產生一個交流磁場,而轉子則由永磁鐵或由用戶提供的電源來提供磁場。在定轉子中的磁場相互作用下,轉子便得以旋轉,從而有效地將電能轉化為了機械動能。
交流電機種類繁多,它們的工作原理和組成也各不相同。當前最常見的交流電機是三相異步電機,其基本工作原理是在三相交流電的作用下,定子線圈中產生了一個旋轉磁場,使得機械部分的轉子被迫跟隨其運動。而另外一種交流電機則是同步電機,它的轉子和定子轉速具有嚴格的同步關系,功率密度和效率要比異步電機更高。
總之,交流電機是一種將交流電能轉換成機械能的機械轉動器件,其基本工作原理是利用電磁感應和磁場轉動力的相互作用。交流電機種類繁多,應用廣泛,不同的類型在使用時具有各自的優點和不足之處。
伺服電機的概念和工作原理
伺服電機是一種可以根據外部的控制信號調整輸出的力矩、轉速和位置等參數的電動機。它通常由電動機、減速器以及專門的電子控制系統等組成,具有非常高的精度和可編程性,可以根據不同工作場合實現不同的轉速、負載等參數的定制。
伺服電機的工作原理如下:伺服電機通過外部反饋裝置(如編碼器、傳感器等)采集系統反饋信號,將其與目標信號進行比較和分析,從而改變控制信號的幅度、頻率和相位,調整輸出的動態性能和精度。控制器內置了比例、積分和微分(PID)算法,一般情況下,反饋信號和目標信號之間的誤差越小,輸出的控制信號也就越小,從而保證了系統穩定性和精度。
伺服電機通常應用于需要精準定位、追蹤或調整位置的場合,如數控機床、印刷設備、機器人、醫療裝置、半導體設備等。在這些應用中,對于伺服電機的精度和可靠性要求非常高,所以伺服電機通常選用特殊材料和設計保證長時間穩定運行。例如,定子鐵芯常常采用硅鋼片制成,以減少鐵損,降低磁化和旋轉損耗。同時,還采用高強度的永磁材料制造轉子,提高輸出能力和效率。
總之,伺服電機是一種高精度、可編程的電動機。它的工作原理是通過反饋裝置采集反饋信號和目標信號之間的差異,計算并輸出相應的控制信號,實現精準的力矩、轉速和位置調整。由于其出色的性能和精度,伺服電機在需要高精度控制和調整的應用場合廣泛應用。
交流電機和伺服電機的優缺點
交流電機和伺服電機是兩種不同的電機類型,它們各自具有一些優點和一些缺點。
交流電機的優點:
1. 高效率:交流電機通常具有高效率,在大多數工業和民用應用中表現出色。
2. 簡單:交流電機通常非常簡單,易于維護和操作。
3. 成本低:交流電機通常的制造成本比較低,價格也相對便宜。
交流電機的缺點:
1. 轉速不可調節:交流電機的轉速通常是固定的,不能很好地適應各種應用場景。
2. 精度低:交流電機在某些高精度應用場景中可能無法滿足高要求。
3. 不穩定:由于交流電機運行的穩定性不如伺服電機,所以在一些特定的應用場景中可能無法勝任。
伺服電機的優點:
1. 高精度:伺服電機具有非常高的精度,可以實現微小的運動和定位,可以滿足精度要求高的場景。
2. 可編程:伺服電機的控制系統可以以編程的方式進行定制,可以根據需求實現不同的運動軌跡。
3. 高效性:伺服電機的效率高,功率密度高,同時能夠在高負載下保持穩定的轉速。
伺服電機的缺點:
1. 價格較高:相比于普通交流電機或直流電機,伺服電機的價格通常較高,這使得其在某些場景下可能不是最優的選擇。
2. 控制技術要求高:伺服電機需要配合高精度、高速度的運動控制技術,這對于控制系統的設計和實現都提出了更高的要求,工程師需要具備更高的技術水平和專業知識。
3. 維護難度較大:伺服電機通常比較復雜,需要經常進行故障排查和維護,而這些工作通常需要更高水平的技術和更加精細的操作。
4. 需要精確匹配:伺服電機的控制器需要與電機進行精確匹配,而不同品牌、不同型號的伺服電機可能不相容,使得其在不同場景下的應用受到限制。
5. 對供電質量要求較高:伺服電機需要穩定的電源和電壓,電源波動或電壓不穩定都會影響其性能和運行穩定性。
綜上所述,雖然伺服電機具有高精度、高響應等優點,但也存在一些限制和缺點,需要在實踐中進行綜合考慮和選擇。
交流電機和伺服電機的控制方式
交流電機和伺服電機的控制方式有以下幾種:
1. 手動調速控制:通過手動調節電機的電壓、電流或頻率等參數,以實現電機的轉速控制。手動調速控制通常操作簡單,但控制精度、響應速度和穩定性較差。
2. 開環控制:開環控制也稱為基本控制,通過計算機、單片機等控制器發送電機控制信號,控制電機的轉速、轉矩等參數。開環控制通常需要在電機和負載之間設置速度、位置、壓力等傳感器,以反饋電機和負載的狀態信息,提高控制精度和響應速度。
3. 閉環控制:閉環控制結合了開環控制和反饋控制的優點,使用位置發送器或編碼器等傳感器,測量實際位置或轉速,反饋給控制器進行控制,以實現更加精確的控制效果。閉環控制通常需要內置比例、積分、微分(PID)控制器,進行控制參數的優化和整定。
4. 異步伺服控制:異步伺服控制是一種基于開環控制和閉環控制的控制方式,通常使用交流異步電機作為驅動器。異步伺服控制通過控制電機的轉速、磁場和轉矩等參數,通過一系列控制算法實現高性能的控制效果。
5. 交流伺服控制:交流伺服控制更為普遍地使用于伺服電機,通常使用永磁同步電機作為驅動器。它采用閉環控制方式,將電機的定位準確性和動態性能提高到極致,具有高效率、高精度、高速度、低噪音等特點。
總的來說,交流電機和伺服電機的控制方式包括手動調速、開環控制、閉環控制、異步伺服控制和交流伺服控制等多種,應選取適合的控制方式,以滿足電機的性能需求。
交流電機和伺服電機的接線方法
交流電機和伺服電機的接線方法有所不同,具體如下:
1. 交流電機的接線方法:
交流電機通常有三根電源線和三根電機線。電源線包括A相、B相、C相,電機線包括U相、V相、W相。在接線中,將三根電源線分別接到變頻器或斷路器的U、V、W端子上,將電機的U、V、W相分別接到電機的U、V、W端子上。
2. 伺服電機的接線方法:
伺服電機通常有五根電源線,分別是三相電源線和兩根編碼器反饋線。電源線包括A相、B相、C相,編碼器反饋線分別是A相和B相。在接線中,將三根電源線分別接到伺服驅動器的相線端子上,將編碼器反饋線接到伺服驅動器的編碼器輸出端子上。
總之,交流電機和伺服電機的接線方法有所不同,交流電機只需要考慮三相電源和三相負載的連接,而伺服電機需要考慮電源、電機和編碼器等多個部分的連接,要特別注意接線的正確性和質量。
交流電機和伺服電機的使用方法
交流電機和伺服電機是兩種不同類型的電動機,使用方法也略有不同。下面是它們的常見使用方法:
1. 交流電機的使用方法:交流電機通常通過交流電源供電,并且控制方式相對簡單,通常使用電阻、電容、感抗等元器件進行控制。使用時需要注意交流電源的額定電壓和頻率,以及電機的額定電流和功率。在使用大型交流電機時,還需要注意是否需要使用起動器和保護裝置等設備。對于交流電機的維護保養,需要定期清理電機外表面的塵土,檢查電機內部的絕緣狀態和軸承潤滑狀態等。
2. 伺服電機的使用方法:伺服電機的控制方式更加復雜,需要使用專門的控制器進行編程和調試。使用時需要將編碼器或傳感器連接到控制器的反饋通道中,通過程序語言指定目標位置、速度和加速度等參數,實現對伺服電機的精細控制。在使用伺服電機時,需要保證電機和控制器的相互匹配和兼容性,同時需要考慮安裝、接線和調試等問題。在伺服電機的維護保養中,需要定期清理電機表面和內部的塵土和油漬,檢查編碼器或傳感器的工作狀態,以及檢查控制器的編程文件和參數設定等。
總之,交流電機和伺服電機都是電動機的一種,使用方法有所不同。交流電機通常使用簡單,但是無法精細調節,適用于一些基礎的動力裝置;伺服電機使用稍有復雜,但是可以根據需要實現非常高的精度和控制要求,適用于需要高精度位置控制的設備。對于兩種類型的電機的維護保養,需要進行定期檢查和清理,保證設備長時間平穩運行。










 工商網監
工商網監
評論