 電子發(fā)燒友App
電子發(fā)燒友App


1 前言
探索是指當(dāng)機(jī)器人處于一個(gè)完全未知或部分已知環(huán)境中,通過一定的方法,在合理的時(shí)間內(nèi),盡可能多的獲得周圍環(huán)境的完整信息和自身的精確定位,以便于實(shí)現(xiàn)機(jī)器人在該環(huán)境中的導(dǎo)航,并實(shí)現(xiàn)后續(xù)工作任務(wù)。探索是移動(dòng)機(jī)器人實(shí)現(xiàn)自主的關(guān)鍵功能,是移動(dòng)機(jī)器人的一項(xiàng)重要任務(wù),也是一個(gè)重要的研究領(lǐng)域。在許多潛在的應(yīng)用中,建筑物、洞穴、隧道和礦山內(nèi)的搜索操作有時(shí)是極其危險(xiǎn)的活動(dòng)。使用自主機(jī)器人在復(fù)雜環(huán)境中執(zhí)行這些任務(wù),降低了人類執(zhí)行這些任務(wù)的風(fēng)險(xiǎn)。
本文主要講解ROS平臺(tái)下三種常用的自主探索算法原理。
frontier_exploration是基于邊界的自主探索算法,邊界定義為已知空間和未知空間之間的區(qū)域(Frontiers are regions on the boundary between open space and unexplored space),在原文獻(xiàn)[1]中,作者通過BFS(深度優(yōu)先搜索)算法從機(jī)器人當(dāng)前位置搜索邊界。
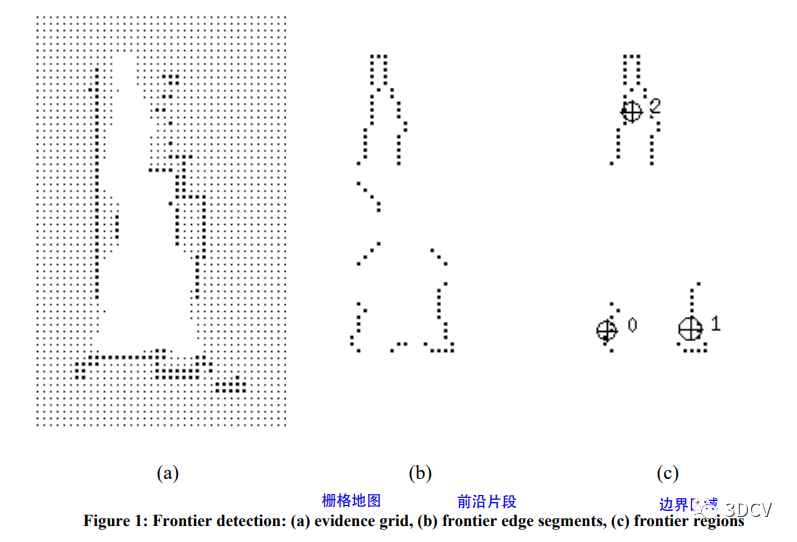
圖a是在柵格地圖中檢測到了邊界,圖b是提取出來的屬于邊界的柵格點(diǎn),然后使用一種“濾波”方法,濾除一些過小的邊界(因?yàn)檫@些邊界往往不需要特意去探索,機(jī)器人在行進(jìn)過程中會(huì)構(gòu)建出這里的地圖,或者它小到不影響導(dǎo)航和后續(xù)功能),一般這個(gè)閾值可以取機(jī)器人的自身尺寸(原文中是這樣的),就得到了圖c中的邊界區(qū)域。
這一系列邊界區(qū)域,需要通過某種方法選擇最合適的一個(gè)作為首先要前往的一個(gè)邊界區(qū)域,在frontier_exploration算法中僅選擇距離機(jī)器人當(dāng)前位置(歐氏距離)最近的一個(gè)作為首先要前往的目標(biāo)。
在文獻(xiàn)[2]中提出了選擇這些目標(biāo)點(diǎn)的方法,根據(jù)作者的結(jié)論,在單機(jī)器人探索中,Nearest Frontier Approach(選擇最近點(diǎn))和Behaviour-Based Coordinated Approach(基于行為,融合了距離最近、避開障礙物、避開其他機(jī)器人三個(gè)懲罰項(xiàng))兩個(gè)方法使用的時(shí)間相近都是最短,其中Nearest Frontier Approach用時(shí)更短。
在地圖質(zhì)量方面,使用Hybrid Integrated Coordinated Approach(該方法設(shè)計(jì)比較復(fù)雜,融合了SLAM算法,提高了定位精度,會(huì)在系統(tǒng)中評(píng)估并存儲(chǔ)精度較高的上一次位姿,當(dāng)機(jī)器人定位精度下降時(shí),會(huì)回溯上一次精度較高的位姿,導(dǎo)致耗時(shí)嚴(yán)重)它的耗時(shí)嚴(yán)重超過其他方法,雖然總的來說,減少探索時(shí)間的目標(biāo)和良好的地圖質(zhì)量是相互沖突的,但我認(rèn)為綜合來看這種方法是不實(shí)用的,而地圖精度僅次于Hybrid Integrated Coordinated Approach的算法是Nearest Frontier Approach和 Cost-Utility Approach,分為成本函數(shù)(Cost)和效用函數(shù)(Utility),采用加權(quán)的思想,作者給出的表達(dá)式如下:
U(a)表示當(dāng)前往這個(gè)邊界點(diǎn)a時(shí),能擴(kuò)大多少未知區(qū)域,以a為圓心,以一定長度Rs為半徑(一般設(shè)置為傳感器探測半徑)的圓覆蓋的未知柵格。
C(a) 表示當(dāng)前位置到邊界點(diǎn)的距離。
目前來看選擇距離最近的方法雖然很呆很簡單,但確實(shí)好用。另外,一個(gè)邊界區(qū)域由很多柵格點(diǎn)組成,這時(shí)就需要通過一些算法選擇目標(biāo)邊界點(diǎn),作者在源代碼中列舉了三種常用方法:closest(BFS第一個(gè)檢測到的點(diǎn))、middle(中點(diǎn))、centroid(質(zhì)心)。-frontier_search.cpp的buildNewFrontier()函數(shù)中
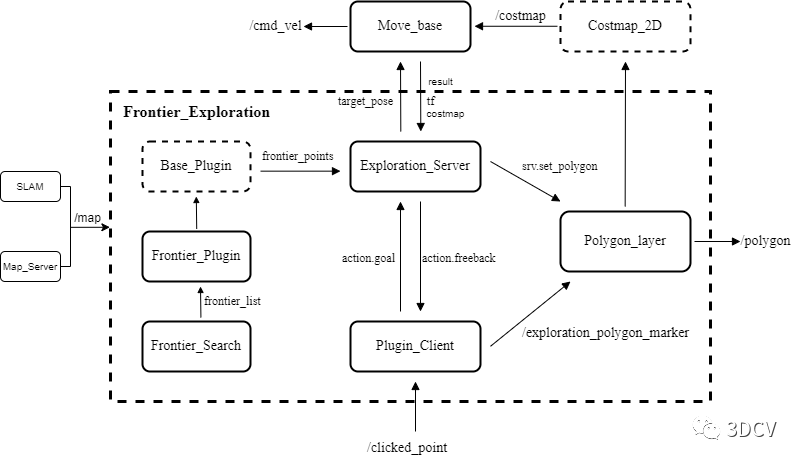
另外,可應(yīng)采用插件的形式管理自主探索的算法,在源代碼中提供了兩個(gè)example插件,通過Base_Plugin接口類將自主探索算法集成到Exploration_Server中,便于修改,算法流程圖如下所示。
3 explorate_lite
explorate_lite的代碼是基于frontier_exploration16.04版本寫的,但是經(jīng)過作者幾次更新代碼有了很大的改進(jìn),改進(jìn)點(diǎn)如下:
(1)它添加了一個(gè)frontierCost函數(shù)用來判斷計(jì)算邊界區(qū)域的代價(jià),對(duì) 到邊界的距離 + 邊界大小 (+前沿方向分量) 幾個(gè)項(xiàng)加權(quán)后,排序,選擇代價(jià)最小的邊界的質(zhì)心作為目標(biāo)點(diǎn)。
(2)在frontier_exploration中對(duì)于邊界點(diǎn)Frontier的定義放在了Frontier.msg消息里面,而它定義為結(jié)構(gòu)體形式,其中也包含了更多信息。
(3)它添加了tf校驗(yàn)機(jī)制,確保了 map_frame-robot_base_frame 的通暢
(4)添加了rosconsole記錄器記錄Debug信息
(5)添加了更多接口方便通過launch文件對(duì)這些參數(shù)進(jìn)行修改
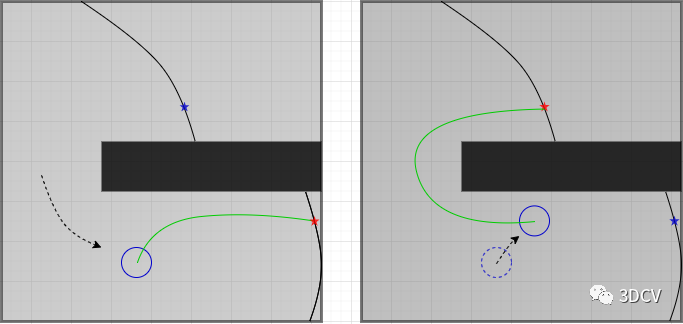
(6)這個(gè)修改的優(yōu)劣有待討論:explorate_lite在發(fā)布目標(biāo)邊界點(diǎn)時(shí),使用的是定時(shí)發(fā)布,如下圖,當(dāng)機(jī)器人選擇了一個(gè)當(dāng)前的“最近點(diǎn)”時(shí),行進(jìn)過程中遇到更近的會(huì)不會(huì)換一個(gè)目標(biāo)點(diǎn),這樣會(huì)增加路徑重復(fù)率,也會(huì)造成機(jī)器人的頻繁起停。比如下圖所示,機(jī)器人運(yùn)行至左圖情況時(shí)選擇了紅色五角星為目標(biāo)點(diǎn),但運(yùn)行過程中發(fā)現(xiàn)左圖中藍(lán)色五角星更優(yōu),有可能會(huì)出現(xiàn)右圖所示更新選擇的情況,造成路徑重復(fù)和機(jī)器人的頻繁起停。
(7)設(shè)置了容忍時(shí)間,超時(shí)會(huì)把這個(gè)點(diǎn)加到黑名單中,可以類似仿照限定程序總運(yùn)行時(shí)間
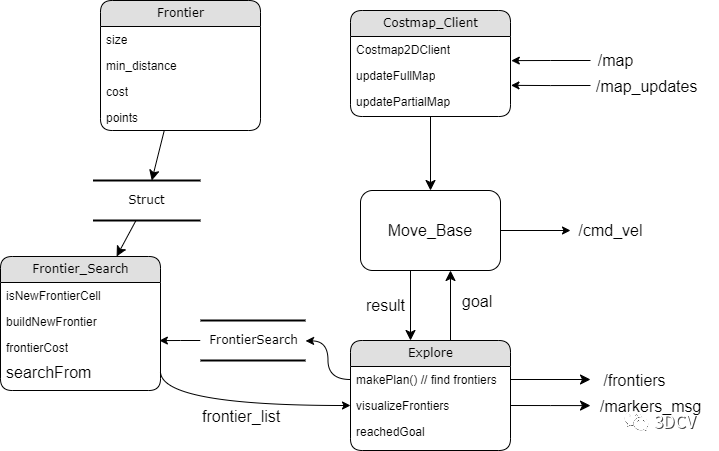
explore_lite程序的框圖如下:
4 rrt_exploration
rrt_exploration[4]分為四個(gè)主要部分:Global Frontier Detector、Local Frontier Detector、Filter、Assigner。
(1)Global Frontier Detector、Local Frontier:使用全局和局部邊緣檢測點(diǎn)去選擇下一步應(yīng)該探索的邊界點(diǎn),生長的RRT數(shù)到達(dá)的點(diǎn)如果位于未知區(qū)域,則這個(gè)的被認(rèn)為是邊界點(diǎn),全局邊緣檢測是一種從初始位置開始一直執(zhí)行的RRT搜素,全局RRT樹不重置,隨著時(shí)間不斷生長、細(xì)化,主要是防止機(jī)器人錯(cuò)過在地圖上探索小角落的機(jī)會(huì),也確保原理機(jī)器人當(dāng)前位置的點(diǎn)被檢測和探索[rrt_exploration],而局部邊緣檢測是以機(jī)器人當(dāng)前位置為起始點(diǎn)拓展的RRT樹,這個(gè)局部樹搜索到一個(gè)邊界點(diǎn)后會(huì)重置樹。
這里存在一些問題:
全局RRT樹的生長速度隨著樹的生長而變慢
RRT是一種漸進(jìn)最優(yōu)的算法,理論上時(shí)間足夠長可以覆蓋整個(gè)地圖,但其具有隨機(jī)性,有限時(shí)間內(nèi)很可能無法完全探測所有未知區(qū)域,特別是實(shí)際應(yīng)用中往往是有時(shí)間要求的
RRT本身的生長問題:當(dāng)一個(gè)分支無法生長延伸時(shí),需要回溯到之前的未知,這會(huì)增加搜索時(shí)間和重復(fù)區(qū)域
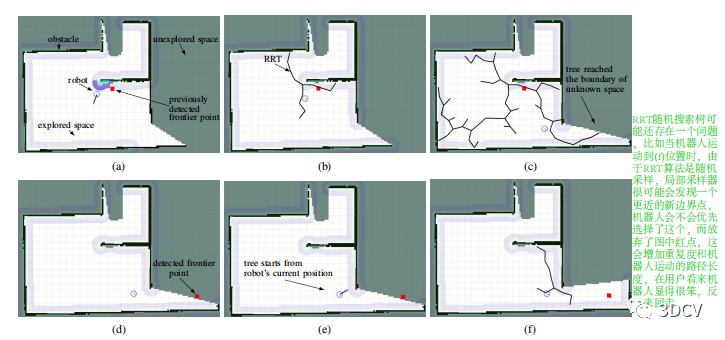
如下圖,RRT具有隨機(jī)性,可能在機(jī)器人前往一個(gè)目前“最優(yōu)”的目標(biāo)點(diǎn)時(shí),突然發(fā)現(xiàn)了一個(gè)更好的點(diǎn),機(jī)器人需要折返,盡管這種可能性很小,但可能會(huì)出現(xiàn)這種情況,會(huì)增加時(shí)間和重復(fù)度,而frontier_exploration這種算法往往有更好的傾向性和啟發(fā)性,而且在探索過程中使用了BFS雖然時(shí)間較慢(我認(rèn)為是微小的),但是可以搜索到所有可能的邊界,并通過權(quán)重合理選擇探索順序。
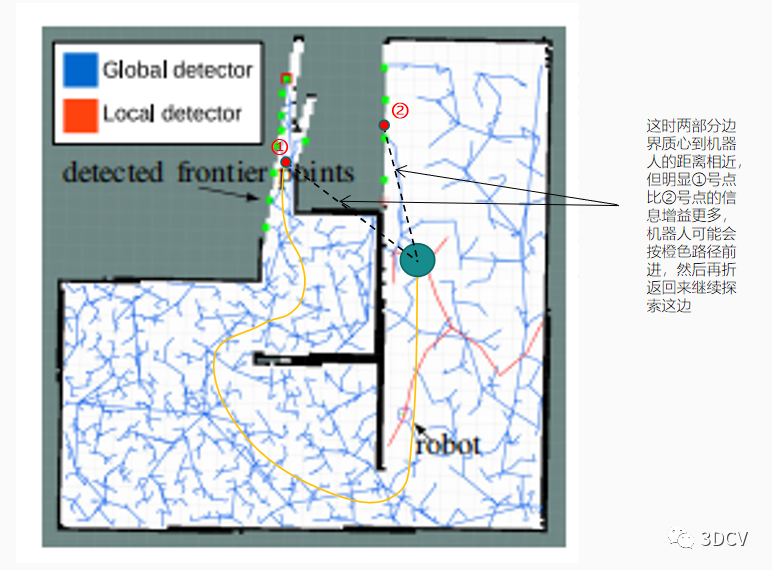
RRT源代碼中提供了使用opencv進(jìn)行邊界檢測的方法作為比較,將使用cv2.findContours()方法檢測出來的邊界序列求質(zhì)心后打包發(fā)送,發(fā)送給Filter濾波后再發(fā)送給Assigner,在Assigner中求出最終的得分,選擇得分高的節(jié)點(diǎn)發(fā)送個(gè)Move_base節(jié)點(diǎn),這就出現(xiàn)一個(gè)情況在每一次檢測節(jié)點(diǎn)輪詢,目標(biāo)點(diǎn)是不斷發(fā)生變化的(很具有隨機(jī)性),也就是說有可能還沒到當(dāng)前發(fā)布的位置時(shí),隨著地圖更新,又會(huì)產(chǎn)生新的目標(biāo)點(diǎn),如果向一個(gè)方向即將(還沒)探索完(這時(shí)它的信息增益I很小了),還是可能會(huì)被其他位置的目標(biāo)邊界點(diǎn)吸引,這樣會(huì)增加重復(fù)性和探索時(shí)間,及時(shí)作者加了滯回增益h,也不能避免發(fā)生這種情況。
(2)Filter
對(duì)搜索到的點(diǎn)進(jìn)行聚類,形成邊界,這里的聚類方法也是使用最簡單的質(zhì)心聚類法,質(zhì)心聚類公式如下:
(3)Assigner
從現(xiàn)有的目標(biāo)點(diǎn)中根據(jù)導(dǎo)航成本(N)和信息增益(I)兩項(xiàng)選擇機(jī)器人下一步需要前往的目標(biāo)點(diǎn)
可以借鑒的一點(diǎn)是RRT選擇點(diǎn)的公式,在信息增益I這一項(xiàng)前加了一個(gè)滯回增益項(xiàng)h,h也跟距離有關(guān),防止一個(gè)很遠(yuǎn)但I(xiàn)過大的邊界點(diǎn)把機(jī)器人吸引過去。
RRT相較于frontier_exploration的優(yōu)勢就是速度快,但作者也在文獻(xiàn)中實(shí)驗(yàn)指出,探索時(shí)間比基于圖像處理的時(shí)間稍長,但是優(yōu)勢在于可以方便的拓展到三維。
5 總結(jié)
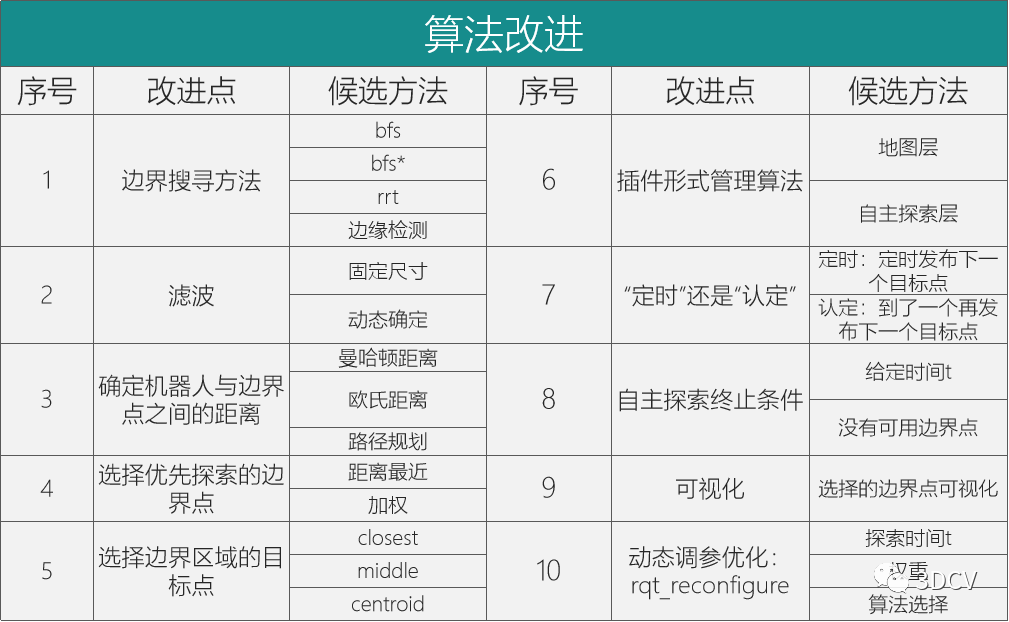
最后,就是我經(jīng)過看論文和閱讀源代碼,分析總結(jié)的自主探索算法可以改進(jìn)的點(diǎn),通過我閱讀一些文獻(xiàn),我發(fā)現(xiàn)對(duì)算法的改進(jìn)確實(shí)就是從這幾個(gè)方面入手的。
審核編輯:劉清









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論