 電子發燒友App
電子發燒友App


摘要:給出了以AT89C2051為核心,利用單片機的運算和控制功能,并采用串口液晶顯示模塊實時顯示所測速度和里程的速度里程表設計方案。該方案由于使用了串口液晶顯示模塊和E2PROM,以及高效快速算法,因而可在節約系統資源和簡化程序設計的基礎上保證測量精度和系統實時性。
1 系統概述
1.1 系統組成
本速度里程表由信號預處理電路、AT89C2051單片機、串口液晶顯示電路、串口數據存儲電路和系統軟件組成。其中信號預處理電路包含信號放大、波形變換和波形整形。系統硬件框圖如圖1所示。信號預處理電路中的放大器用于對待測信號進行放大,以降低對待測信號的幅度要求;波形變換和波形整形電路則用來將放大的信號轉換成可與單片機接口的TTL信號;通過單片機的設置可使INT0引腳能夠對內部定時器T0的工作進行控制,這樣能精確地測出加到INT0引腳的正脈沖寬度(即測出脈沖信號的周期);速度顯示部分采用串口液晶顯示模塊,所得的數據采用I2C總線?并通過E2PROM來存儲,因而節省了所需單片機的口線和外圍器件,同時也簡化了顯示部分的軟件編程。
系統軟件包括單片機和液晶模塊的初始化模塊、液晶模塊的寫數據/命令子模塊、周期測量模塊、速度里程計算模塊、數據存儲模塊、速度和里程顯示數據轉BCD碼模塊、顯示數據消多余零模塊、數據顯示模塊以及實時中斷服務模塊等。
1.2 系統工作原理
該設計能實時地將所測的速度顯示出來,同時也能夠累計顯示總里程數。該速度里程表能將傳感器輸入到單片機的脈沖信號的寬度(傳感器將車速轉變成相應寬度的脈沖信號)實時地測量出來,然后通過單片機計算出速度和里程,再將所得的數據存儲到串口數據存儲器,并由串口液晶顯示模塊實時顯示出所測速度。本設計用兩個按鍵來控制顯示速度或里程。考慮到信號的衰減、干擾等影響,在信號送入單片機前應對其進行放大整形,然后再輸入到單片機進行測速。單片機利用定時器T0的控制功能測出輸入信號的周期后,再利用單片機的算術運算功能將周期轉換成速度,同時每秒鐘進行一次里程累計,從而計算出總里程。最后將得出的速度、里程值存儲在E2PROM中,并根據兩個按鍵的選擇情況來顯示速度或里程。為了方便計算要顯示數據值的段碼,可再將其轉換成壓縮的BCD碼,然后通過查表將要顯示的數據值中每一位的壓縮BCD碼轉換成8段碼送到顯示緩沖區,最后經串口送至液晶顯示模塊以顯示所測的速度或里程。
設計時,應綜合考慮測速精度和系統反應時間。本設計用測量脈沖頻率來計算速度,因而具有較高的測速精度。為了保證系統的實時性,系統的速度轉換模塊和顯示數據轉BCD碼模塊都采用快速算法。另外,還應盡量保證其它子模塊在編程時的通用性和高效性。本設計的速度和里程值采用8位顯示,并包含兩個小數位。
2 系統硬件設計
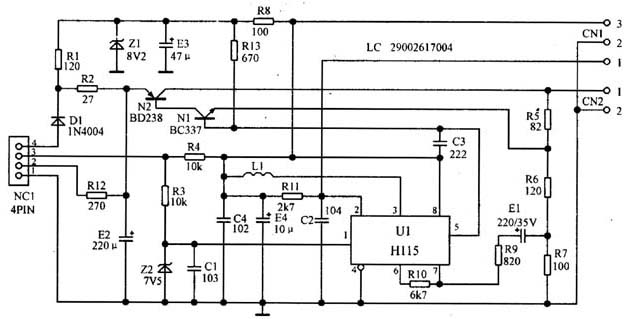
2.1 信號預處理電路
系統的信號預處理電路如圖2所示。 它由二級電路構成,第一級是由開關三極管組成的零偏置放大器,采用開關三極管可以保證放大器具有良好的高頻響應。當輸入信號為零或負電壓時,三極管截止,電路輸出高電平;而當輸入信號為正電壓時,三極管導通,此時輸出電壓隨著輸入電壓的上升而下降,這使得速度里程表既可以測量任意方波信號的頻率,也可以測量正弦波信號的頻率。由于放大器的放大功能降低了對待測信號的幅度要求,因此,系統能對任意大于0.5V的正弦波和脈沖信號進行測量。預處理電路的第二級采用帶施密特觸發器的反相器CT74LS14來把放大器生成的單相脈沖轉換成與COMS電平相兼容的方波信號?同時將輸出信號加到單片機的P3.2口上。
它由二級電路構成,第一級是由開關三極管組成的零偏置放大器,采用開關三極管可以保證放大器具有良好的高頻響應。當輸入信號為零或負電壓時,三極管截止,電路輸出高電平;而當輸入信號為正電壓時,三極管導通,此時輸出電壓隨著輸入電壓的上升而下降,這使得速度里程表既可以測量任意方波信號的頻率,也可以測量正弦波信號的頻率。由于放大器的放大功能降低了對待測信號的幅度要求,因此,系統能對任意大于0.5V的正弦波和脈沖信號進行測量。預處理電路的第二級采用帶施密特觸發器的反相器CT74LS14來把放大器生成的單相脈沖轉換成與COMS電平相兼容的方波信號?同時將輸出信號加到單片機的P3.2口上。
2.2 單片機的選擇
速度里程測量電路選用AT89C2051作為頻率計的信號處理核心。AT89C2051包含2kB閃存、128B的RAM、15根I/O口線、2個16位定時計數器、5個向量二級中斷結構和1個全雙工的串行口,同時還具有加密陣列的二級程序存儲器加鎖功能。設計中用到了AT89C2051的T0、T1 定時器和INT0引腳,以及P1端口的6個口線。由于該單片機與89C51相兼容,因此在硬件電路設計和軟件編程方面更加方便。考慮到AT89C2051本身固有的特點,設計時需注意以下幾點:首先,它的程序存儲器空間為2kB,因此所有的跳轉和分支轉移指令都要限制在這個范圍內。其次,它沒有MOVX指令,也就是說,它不支持外部存儲器操作,這一點設計時一定要考慮到。此外,AT89C2051自身還有一些其它特點,譬如可以使用命令使其工作在低功耗模式等。單片機利用T0定時器和INT0引腳來測量輸入方波信號的周期,而使用外部中斷0來控制定時器T0是否開始定時。當定時器T0的運行控制位復位時,不管P3.2引腳是何值,定時器都不工作。只有當定時器T0的運行控制位置位后,才能根據P3.2引腳狀態來決定定時器是否工作。當P3.2引腳出現高電平時,定時器T0開始定時;而在其出現低電平時,定時器T0停止工作,并將測量信號的周期保存在定時器的16位寄存器中。系統初始化時,可通過設置使T0 和T1定時器工作在模式1方式。T1定時器主要用于形成1秒鐘定時信號,用以為測量里程提供時間條件。
2.3 液晶顯示電路和數據存儲電路
本設計的顯示部分采用液晶顯示模塊LCM0825?該模塊與單片機的接口電路如圖3所示。LCM0825是8位段碼式液晶顯示模塊,它內部集成有LCD控制器、LCD驅動器和RAM,因而可方便顯示數據的編程。液晶顯示模塊采用3~4線串行數據輸入,可直接與單片機接口。由于串行接口方式節省了所需的口線和系統資源,因而使系統具有較高的資源利用率。該模塊可在2.7V~5.2V電壓下工作,其低功耗及背光可調特性使得設計更具有經濟性和通用性。LCM0825能夠顯示8位數據,每一個數據均以8段碼的形式放在其內部顯示RAM區,并用模塊內RAM的兩個存儲地址來放置一個數據的8段碼。8位數據共占用內部16個地址。每一個數據位的8段碼存放形式及高低地址存放段碼的順序都和表1所列的第8位數據的8段碼存放格式一樣,只是段碼的存放地址不同。所以,編程時一定要考慮數據的存放地址和形式。在使用該液晶顯示模塊時,VCC與VLCD之間可用一個50kΩ的電位器來調整背光。
表1 第8位數據段碼與LCM0825內部RAM的對應關系
| D3 | D2 | D1 | D0 | ADDR |
| 8A | 8B | 8C | DP8 | 00000 |
| 8F | 8G | 8E | 8D | 00001 |
數據存儲電路采用I2C總線的E2PROM存儲器24C64。24C64是串行的E2PROM存儲器,其存儲容量為8kB?SCL為時鐘線,SDA為數據線。里程數據保存在24C64,因此中可保證掉電時數據不丟失。此外,使用串口也節省了數據口線。
3 系統軟件設計
3.1 數據處理過程
待測信號經預處理電路后加至單片機的P3.2(INT0)引腳可為單片機測量信號周期提供有效的輸入信號。單片機通過檢測P3.2引腳電平來決定是否啟動測量周期程序。當該引腳為高電平時?系統處于等待狀態,要一直到該引腳出現低電平時才開始測周期。測量時?首先將零賦給THO、TL0兩個寄存器,以將定時器T0的運行控制位TR0置位,同時也將ET0置位以允許定時器T0中斷。然后再判斷P3.2引腳是否還為低電平,如為低電平則等待,直到出現高電平再開始判斷P3.2引腳是否為低電平,當其不是低電平時再等待。一旦出現低電平,則立即復位TR0以終止定時器,以結束測周期程序。測周期過程中可能會發生定時器T0的中斷,每發生一次中斷則將R0寄存器加一,因此R0實際上是周期值的高字節。測出的周期值存儲在R0、TH0、TL0三個寄存器中,然后將其轉換成速度。速度是用車輪的周長除以脈沖周期得到的。由于所測周期的單位是μs,因此在相除轉換時應將被除數擴大106倍,以保證得出正確的速度。每秒進行一次里程數累加時,可用當前的速度值加上一秒前的里程數得出當前的總里程數,得出的速度和總里程值放到E2PROM中。通過k1、k2鍵可顯示速度或里程值,k1鍵為速度鍵,k2鍵為里程鍵,兩個鍵可以隨時設置。要顯示的速度或里程放到R1、R2、R3三個寄存器后即可調用轉換BCD代碼模塊,以將數據值轉換成壓縮的BCD代碼并顯示處理。考慮到對響應時間的要求,BCD代碼模塊采用快速算法。數據轉變成相應的壓縮BCD代碼后,可調用顯示消多余零和顯示數據存儲模塊,并將要顯示的數據值通過查表轉換成相應數據的8段碼放到顯示緩沖區以備顯示。當然,編程時要把十進制數據的相應8段碼放在表格中,這樣才能進行查表以得到相應數值的段碼。此過程的另一個重要目的是消除最高有效位前面的多余零,以使多余零的段碼處于不顯示狀態,從而保證數據以正常的格式顯示出來。最后,將顯示緩沖區的8位8段碼經串口送至液晶顯示模塊進行顯示。
3.2 系統軟件框圖
本系統軟件采用模塊化設計方法。整個系統由初始化模塊、周期測量模塊、速度轉換模塊、里程計算和存儲模塊、數據轉BCD碼模塊、顯示數據處理模塊、數據顯示模塊、定時器中斷服務模塊以及其它功能模塊組成,圖4給出了其軟件框圖。上電后,首先進入系統初始化模塊,此后系統軟件將開始運行,以實時地將所測數值顯示在液晶模塊上。
3.3 液晶顯示模塊的初始化
LCM0825是串行8位8段液晶顯示模塊。使用時,要在上電后對該模塊進行初始化。在初始化之前,應延時200ms以上再送命令。它的初始化工作過程如下:首先定義液晶模塊(當其命令代碼為:00101001),其次定義振蕩器方式(當其命令代碼為00011000時,將模塊定義為內部RC振蕩方式,命令代碼為00010100時,定義為外部晶體振蕩方式)。然后分別用命令代碼00000001和00000011開振蕩器和開顯示器。以上命令送入后,便可以在需要顯示數據時將相應的段碼直接送入模塊內部的顯示RAM中。在送顯示數據的段碼數據時,要考慮到顯示RAM 的高和低地址所對應的數據段碼的存放形式。其第8位數據的段碼與LCM0825內部的RAM地址的對應關系見表1。以后隨地址的增加依次存放第7位至第1位數據段碼。為了正確地顯示數據,應使要顯示的8位字符在顯示屏幕中為左起第一位,右止第8位。
圖5
另外,寫命令和寫數據程序應分別編寫,因為它們的命令格式及時序不同,見圖5。
由時序圖可見,編寫傳輸子程序時,所傳數據的高位先移入模塊,否則模塊不能正常工作或顯示。同樣,為了能正確讀/寫命令或數據,必須在時序中加入相應的延時;此外,為保證系統的低功耗,每次讀/寫命令或數據之后,都應將CS、RD、WR、DATA 置高電平。
4 結束語
本文介紹了一種基于單片機AT89C2051的速度里程表的設計方法。由于該方案中使用了串口段碼液晶顯示模塊E2PROM儲存器,因而節省了硬件資源,提高了系統性價比。同時,也有益于在此電路基礎上利用單片機的資源擴展其它功能。
- 智能速度(7410)
- 程表設計(7162)


聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。 舉報投訴
相關推薦
采用ATmega16的里程表檢測儀電路設計 — 電路圖天天讀(35)
 3917
3917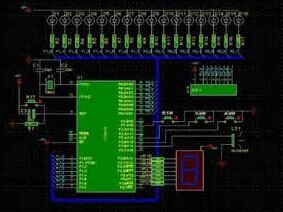

里程表,如何避免單片機接觸不良?
里程表傳感器壞了癥狀
LABVIE怎么對時間積分求行駛里程
STM32的自行車里程速度儀表
pxa255開發板原理圖及源代碼
【DIY作品秀】DIY自行車的數顯速度/里程表
一文淺析汽車儀表盤
為什么晶體管使用越久,功耗越低?
關于如何制作一個電子電路代替汽車轉速傳感器的脈沖信號
關于自行車速度里程計的設計?求大神指點!!!
單片機因震動而引起的復位如何避免?
基于51單片機的秒表設計
基于單片機與光電傳感器的電動自行車速度/里程表設計
基于單片機與光電傳感器的電動自行車速度與里程表的設計
基于單片機的簡易里程表
基于單片機的自行車里程監測系統的設計
基于單片機的車速里程表的設計仿真沒結果
大眾保養燈歸零
奧迪100 2.2E里程表不計程時,車速表無規律擺動的檢修方法
如何利用51單片機實現智能電子里程表的設計
如何讓汽車儀表組上的指針動起來
小白菜的計劃之:2012年12月——2013年6月
急求一個用AT89S51做的出租車計費系統!具體內容如下
求助各位老大
求大神幫忙用c語言編寫一個自行車速度計和里程計
汽車儀表盤指針改全液晶顯示
汽車保養燈歸零
汽車的嵌入式系統安全如何設置?
汽車組合儀表工作原理上
汽車車速里程表工作原理是什么?
用單片機制作的自行車里程速度表
由51單片機設計的霍爾自行車碼表測速系統電路方案
納智捷汽車里程表調表器
請問如何利用CPLD實現智能數字電壓表的設計?
電子車速里程表的單片機實現方案
2124
用數字集成電路設計的里程表
1659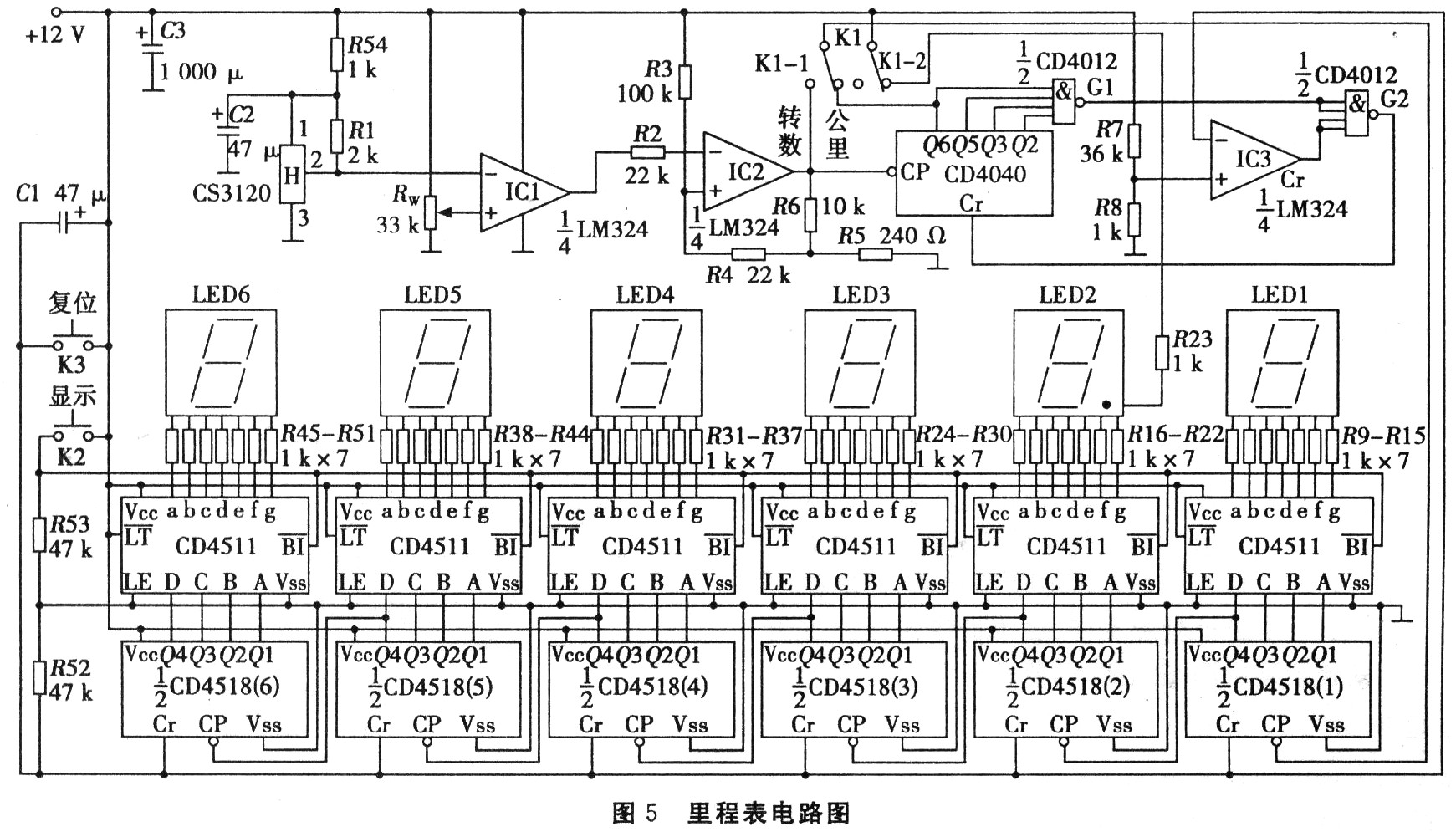
車速里程表原理及速比的計算方法
 75
75
電動自行車速度與里程表的設計方案
5731

電子式里程表設計
0霍爾器件的摩托車車速里程的研究方案
3車速里程表信號裝置及速比的計算分析
1基于單片機的電子式轉速里程表的設計
2電子車速里程表的單片機實現方案解析
2里程表傳感器檢測方法
49693自行車里程速度表的工作原理及設計
14952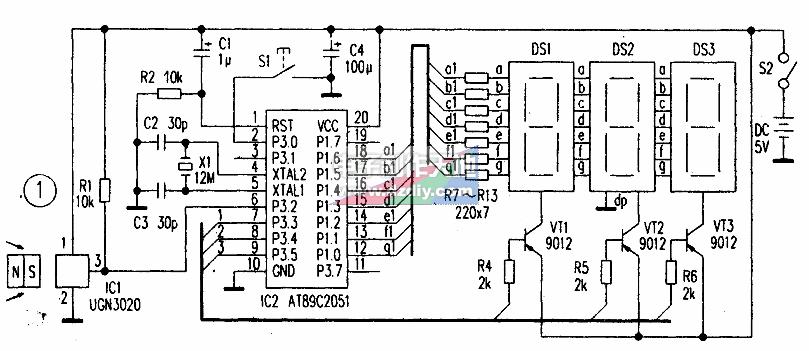

使用MCS51單片機設計實現里程表的詳細資料說明
17自行車里程速度表的電路原理及程序設計
5501
如何設計自行車里程速度計論文免費下載
7奔馳的 EQS 欲把特斯拉的Model 3拉下王座,續航里程超640公里
927基于51單片機的車速里程表項目設計
1251單片機——基于單片機的智能電子里程表
14基于51單片機汽車儀表速度時間里程液晶lcd1602顯示設計
3基于Arduino UNO的自行車里程表和車速表
1
在城市地區使用低等級IMU的單目視覺慣性車輪里程計
982
用于精確讀數的Arduino轉速計電路
1217
智能速度里程表設計
1摩托車里程表可使用雙極霍爾傳感器AH402F,兼容SS360
- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信

-
下載發燒友APP

-
電子發燒友觀察



{kind=link}
版權所有 ? 深圳華秋電子有限公司
電子發燒友 (電路圖) 粵公網安備 44030402000349 號 電信與信息服務業務經營許可證:合字B2-20210191 工商網監
湘ICP備 2023018690 號
工商網監
湘ICP備 2023018690 號
評論