 電子發燒友App
電子發燒友App


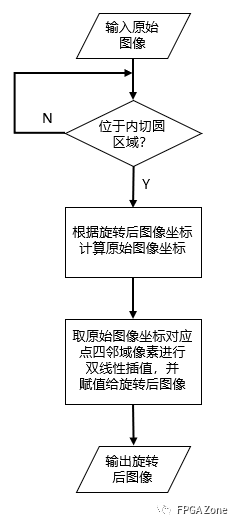
旋轉一般是指將圖像圍繞某一指定點旋轉一定的角度,圖像旋轉后會有一部分圖像轉出顯示區域,可以截圖那部分,也可以改變圖像的尺寸使得圖像顯示完全。
圖像旋轉原理
所謂圖像旋轉是指圖像以某一點為中心旋轉一定的角度,形成一幅新的圖像的過程。這個點通常就是圖像的中心。
由于是按照中心旋轉,所以有這樣一個屬性:旋轉前和旋轉后的點離中心的位置不變。
根據這個屬性,可以得到旋轉后的點的坐標與原坐標的對應關系。
原圖像的坐標一般是以左上角為原點的,我們先把坐標轉換為以圖像中心為原點。假設原圖像的寬為w,高為h,(x0,y0)為原坐標內的一點,轉換坐標后的點為(x1,y1)。可以得到:
X0’ = x0 -w/2;
y1’ =-y0 + h/2;
在新的坐標系下,假設點(x0,y0)距離原點的距離為r,點與原點之間的連線與x軸的夾角為b,旋轉的角度為a,旋轉后的點為(x1,y1), 如下圖所示。
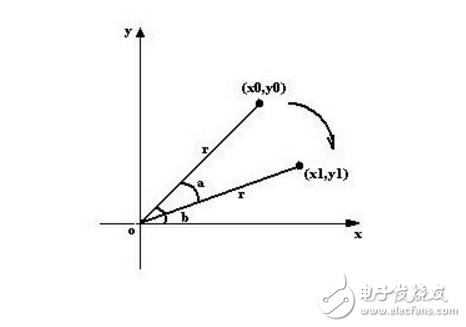
那么有以下結論:
x0=r*cosb;y0=r*sinb
x1 = r*cos(b-a)= r*cosb*cosa+r*sinb*sina=x0*cosa+y0*sina;
y1=r*sin(b-a)=r*sinb*cosa-r*cosb*sina=-x0*sina+y0*cosa;
得到了轉換后的坐標,我們只需要把這些坐標再轉換為原坐標系即可。
x1’ = x1+w/2= x0*cosa+y0*sina+w/2
y1’=-y1+h/2=-(-x0*sina+y0*cosa)+h/2=x0*sina-y0*cosa+h/2
此處的x0/y0是新的坐標系中的值,轉換為原坐標系為:
x1’ = x0*cosa+y0*sina+w/2=(x00-w/2)*consa+(-y00+h/2)*sina+w/2
y1’= x0*sina-y0*cosa+h/2=(x00-w/2)*sina-(-y00+h/2)*cosa+h/2
=(y00-h/2)*cosa+( x00-w/2)*sina+h/2
在OpenCV中,目前并沒有現成的函數直接用來實現圖像旋轉,它是用仿射變換函數cv::warpAffine來實現的,此函數目前支持4種插值算法,最近鄰、雙線性、雙三次、蘭索斯插值,如果傳進去的參數為基于像素區域關系插值算法(INTER_AREA),則按雙線性插值。
通常使用2*3矩陣來表示仿射變換:
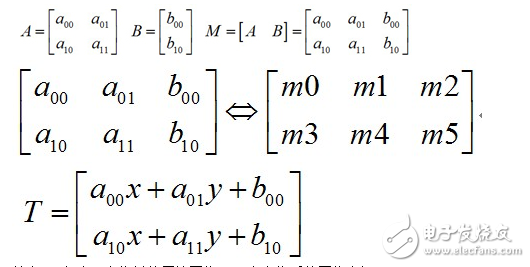
其中,T相當于變換前的原始圖像,x,y為變換后的圖像坐標。
對于cv::getRotationMatrix2D函數的實現公式為:

其中scale為縮放因子(x、y方向保持一致),angle為旋轉角度(弧長),centerx,centery為旋轉中心。

1 旋轉矩形
這里以圖像圍繞任意點(center_x, center_y)旋轉為例,但是圖像的原點在左上角,在計算的時候首先需要將左上角的原點移到圖像中心,并且Y軸需要翻轉。
而在旋轉的過程一般使用旋轉中心為坐標原點的笛卡爾坐標系,所以圖像旋轉的第一步就是坐標系的變換。(x’,y’)是笛卡爾坐標系的坐標,(x,y)是圖像坐標系的坐標,經過坐標系變換后

坐標系變換到以旋轉中心為原點后,接下來就要對圖像的坐標進行變換。

逆變換是

由于在旋轉的時候是以旋轉中心為坐標原點的,旋轉結束后還需要將坐標原點移到圖像左上角,也就是還要進行一次變換。

上邊兩圖,可以清晰的看到,旋轉前后圖像的左上角,也就是坐標原點發生了變換。
在求圖像旋轉后左上角的坐標前,先來看看旋轉后圖像的寬和高。從上圖可以看出,旋轉后圖像的寬和高與原圖像的四個角旋轉后的位置有關。
我們將這個四個角點記為 transLeftTop, transRightTop, transLeftBottom, transRightBottom
設top為旋轉后最高點的縱坐標 top = min({ transLeftTop.y, transRightTop.y, transLeftBottom.y, transRightBottom.y });
down為旋轉后最低點的縱坐標 down = max({ transLeftTop.y, transRightTop.y, transLeftBottom.y, transRightBottom.y });
left為旋轉后最左邊點的橫坐標 left = min({ transLeftTop.x, transRightTop.x, transLeftBottom.x, transRightBottom.x });
right為旋轉后最右邊點的橫坐標 right = max({ transLeftTop.x, transRightTop.x, transLeftBottom.x, transRightBottom.x });
旋轉后的寬和高為newWidth,newHeight,則可得到下面的關系:

旋轉完成后要將坐標系轉換為以圖像的左上角為坐標原點,可由下面變換關系得到:

逆變換

綜合以上,也就是說原圖像的像素坐標要經過三次的坐標變換:
將坐標原點由圖像的左上角變換到旋轉中心
以旋轉中心為原點,圖像旋轉角度a
旋轉結束后,將坐標原點變換到旋轉后圖像的左上角
可以得到下面的旋轉公式:(x’,y’)旋轉后的坐標,(x,y)原坐標,(x0,y0)旋轉中心,a旋轉的角度(順時針)

這種由輸入圖像通過映射得到輸出圖像的坐標,是向前映射。常用的向后映射是其逆運算

opencv實現圖片旋轉功能,非常簡單,幾行代碼即可:
#include《iostream》
#include《time.h》
#include《opencv2/opencv.hpp》
using namespace std;
using namespace cv;
inline double cpu_time(){
return clock()*1000/CLOCKS_PER_SEC;
}
//圖片旋轉操作
void imrotate(Mat& img, Mat& newIm, double angle){
int len = max(img.cols, img.rows);
Point2f pt(len/2.,len/2.);
Mat r = getRotationMatrix2D(pt,angle,1.0);
warpAffine(img,newIm,r,Size(len,len));
//Point2f pt(img.cols/2.,img.rows/2.);
//Mat r = getRotationMatrix2D(pt,angle,1.0);
//warpAffine(img,newIm,r,img.size());
}
int main(){
Mat img = imread(“1.jpg”);
//resize(img,img,Size(256,256));
Mat newIm;
double t1,t2;
t1 = cpu_time();
//調用旋轉方法,模仿matlab,取名為imrotate
imrotate(img,newIm,15);
t2 = cpu_time(); c
out《《“Rotate one image cost: ”《《t2-t1《《“ ms”《《endl;
namedWindow(“Rotate”);
imshow(“Rotate”,newIm);
waitKey(10000);
const string save_name = “rotate.jpg”;
imwrite(save_name,newIm);
return 0;
}
















 工商網監
工商網監
評論