") 分享機械手各部位主要結構元件種類處理組件等
分享機械手各部位主要結構元件種類處理組件等
機械手模型
說到機械手,大家腦海里呈現(xiàn)的應該是上面圖片所示的樣子。
那么,機械手內(nèi)部到底是什么樣的,有什么奧秘嗎?下面和大家分享一下氣動機械手的主要結構。
一、機械手各部位結構
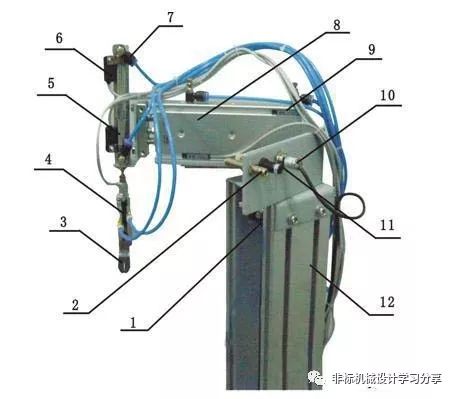
1. 擺動氣缸 2. 定位螺栓 3. 氣動手爪 4、6、9. 磁性開關 5. 標準氣缸 7. 節(jié)流閥 8. 雙聯(lián)氣缸10. 接近開關 11. 緩沖閥 12. 支架
機械手由多個連桿和關節(jié)組成。機械手一般由底座、執(zhí)行機構,如夾鉗、吸盤等,以及它們之間的關節(jié)和連桿組成,機械手能夠在其活動范圍內(nèi),實現(xiàn)任意運動和轉(zhuǎn)向,我們一般把活動的關節(jié)稱為自由度。
二、氣路元件

氣路元件種類
氣動機械手涉及到的氣路元件主要有擺動氣缸、雙聯(lián)氣缸、筆型氣缸和氣源處理組件等。
氣源處理組件
氣源處理組件
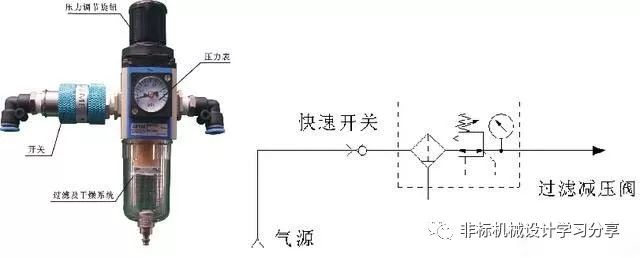
氣源處理組件由壓力調(diào)節(jié)過濾器、進氣開關以及彎頭構成。其氣源由空氣壓縮機提供,壓力范圍在0.6~1.0MPa,之間,輸出壓力是0~0.8MPa,可以調(diào)節(jié)。輸出的壓縮空氣送到各工作單元。
筆型氣缸
筆型氣缸
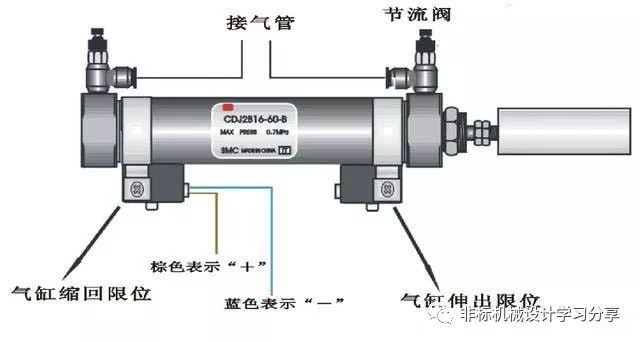
通過氣缸往復運動把物料被送到相應位置。如果進出氣的方向變化,氣缸的運動方向也會隨之變化。氣缸兩側(cè)的磁性開關主要用來跟蹤氣缸是否已經(jīng)運動到指定位置。
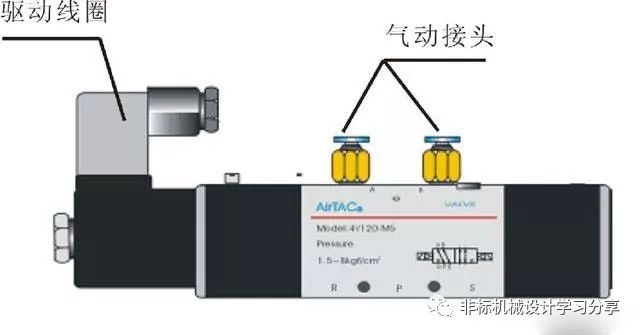
雙線圈電磁閥
雙線圈電磁閥
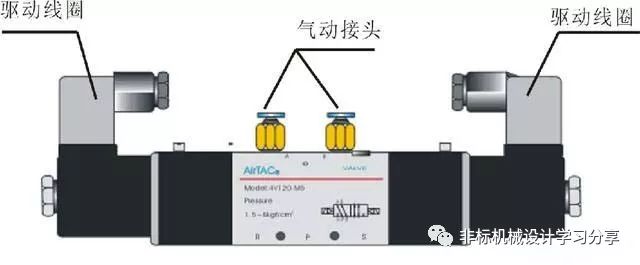
雙線圈電磁閥主要是控制氣缸進、出氣,實現(xiàn)氣缸的伸縮運動。要注意紅色指示分燈正負極,如果正負極接反,也可以工作,但是指示處于關閉狀態(tài)。
單線圈電磁閥
單線圈電磁閥
單線圈電磁閥控制氣缸的單方向運動,實現(xiàn)伸縮運動。與雙線圈電磁閥的不同在于,雙線圈電磁閥初始位置不固定,能夠任意控制兩個位置,而單線圈電磁閥初始位置是固定的只可以控制其中一個方向。
氣動元件動作分析
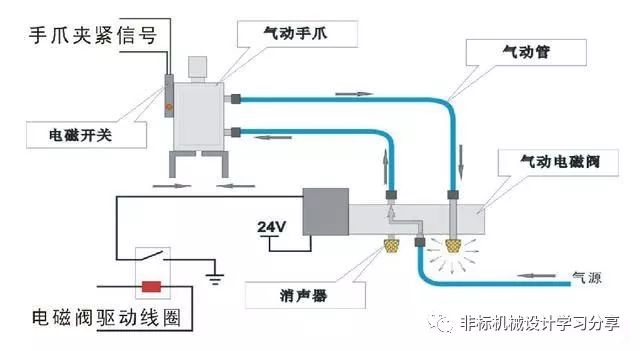
手爪控制示意圖
三、主要傳感器
機械手通過感知器的內(nèi)部傳感器檢測本身的狀態(tài),如速度、位置、加速度等,進而來實現(xiàn)本身與環(huán)境信息,如距離、溫度和壓力的相互作用,環(huán)境信息通過外部傳感器進行檢測。下一步,通過控制器選擇對應的環(huán)境模式指揮機械手完成任務。
機械手內(nèi)部用到的傳感器主要有以下幾種:
1、光電傳感器
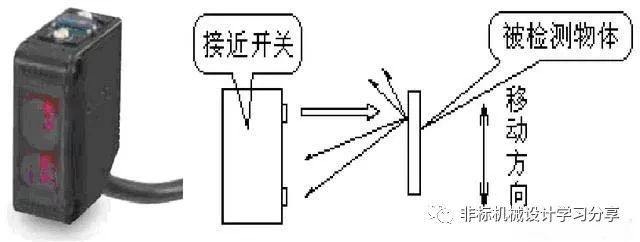
光電傳感器
原理:發(fā)射器發(fā)出的檢測光照射到被測物體上后發(fā)生漫發(fā)射,接收器在接收到足夠強的反射光之后,光電開關開始動作。
2、電感式接近開關
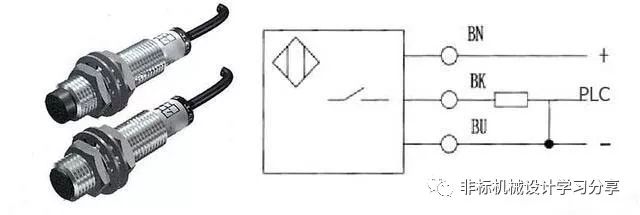
電感式接近開關
原理:電感式接近開關里面有振蕩器,可以產(chǎn)生交變磁場,當感應距離達到某個范圍,金屬目標內(nèi)將會產(chǎn)生渦流,從而使得振蕩強度減弱。振蕩器振蕩及停振的變化,由后面的放大電路進行處理,最終轉(zhuǎn)換為開關信號。
3、氣缸活塞到位檢測----磁性開關
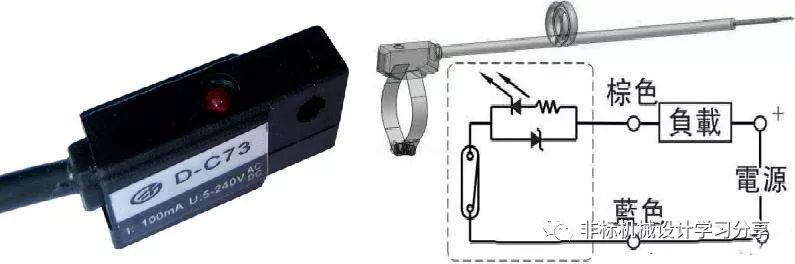
磁性開關
原理:帶有磁環(huán)的氣缸活塞運動到指定位置后,磁性開關內(nèi)的兩個金屬片在磁場的作用下閉合,觸發(fā)信號產(chǎn)生。
四、氣動機械手的工作原理
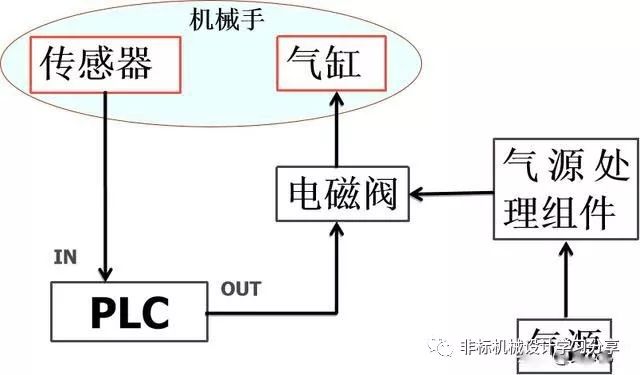
工作原理
氣動機械手主要由控制系統(tǒng)執(zhí)、驅(qū)動系統(tǒng)、執(zhí)行機構和位置檢測系統(tǒng)構成。在PLC程序的控制下,通過氣壓傳動,實現(xiàn)執(zhí)行機構動作。
控制系統(tǒng)的信息將指令傳給執(zhí)行機構,對機械手動作進行跟蹤,如果動作發(fā)生錯誤或者故障,會立即報警。
利用位置檢測裝置將執(zhí)行機構的實際位置傳遞給給控制系統(tǒng),最終將執(zhí)行機構以一定的精度運動到指定位置。
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756590 -
電磁閥
+關注
關注
14文章
511瀏覽量
31570 -
機械手
+關注
關注
7文章
339瀏覽量
29751
原文標題:機械手運動原理及其內(nèi)部結構深度解析!
文章出處:【微信號:gkongbbs,微信公眾號:工控論壇】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
機械手 OEM 的應用
機械手驅(qū)動系統(tǒng)設計要點
使用桁架式機械手有哪些優(yōu)勢?
仿生機械手一般用什么電機?
PLC控制機械手設計
基于 CAN 總線的機械手控制系統(tǒng)The Control S
基于PLC的四軸聯(lián)動簡易機械手控制系統(tǒng)
基于PLC的機械手混合驅(qū)動控制

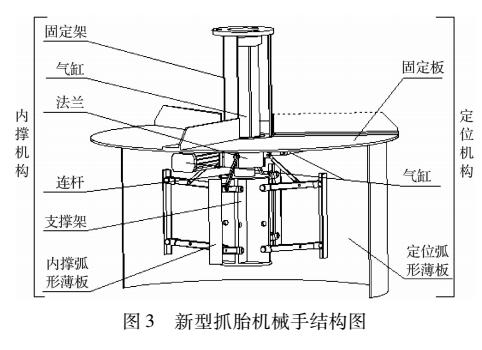
新型抓胎機械手結構優(yōu)化及動作分析
金屬沖壓機械手的種類繁多,它們該如何分類
機械手內(nèi)部是什么樣的嗎?部位結構種類分析







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論