 基于STM32四軸飛行器參考電路設計
基于STM32四軸飛行器參考電路設計
四軸飛行器是一種利用四個旋翼作為飛行引擎來進行空中飛行的飛行器。進入20世紀以來,電子技術飛速發展四軸飛行器開始走向小型化,并融入了人工智能,使其發展趨于無人機,智能機器人。
四軸飛行器不但實現了直升機的垂直升降的飛行性能,同時也在一定程度上降低了飛行器機械結構的設計難度。四軸飛行器的平衡控制系統由各類慣性傳感器組成。在制作過程中,對整體機身的中心、對稱性以及電機性能要求較低,這也正是制作四軸飛行器的優勢所在,而且相較于固定翼飛機,四軸也有著可垂直起降,機動性好,易維護等優點。
系統方案本設計采用STM32F4作為核心處理器,該處理器內核架構 ARM Cortex-M4,具有高性能、低成本、低功耗等特點。
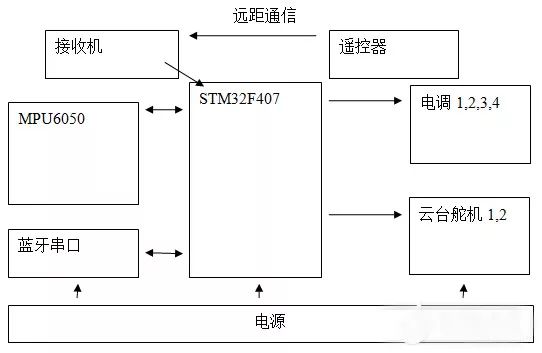
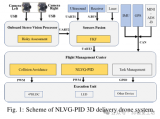
主控板包括傳感器MPU6050電路模塊、無線藍牙模塊、電機啟動模塊,電源管理模塊等;遙控使用商品遙控及接收機。控制芯片捕獲接收機的PPM命令信號,傳感器與控制芯片之間采用IIC總線連接,MCU與電調之間用PWM傳遞控制信號。
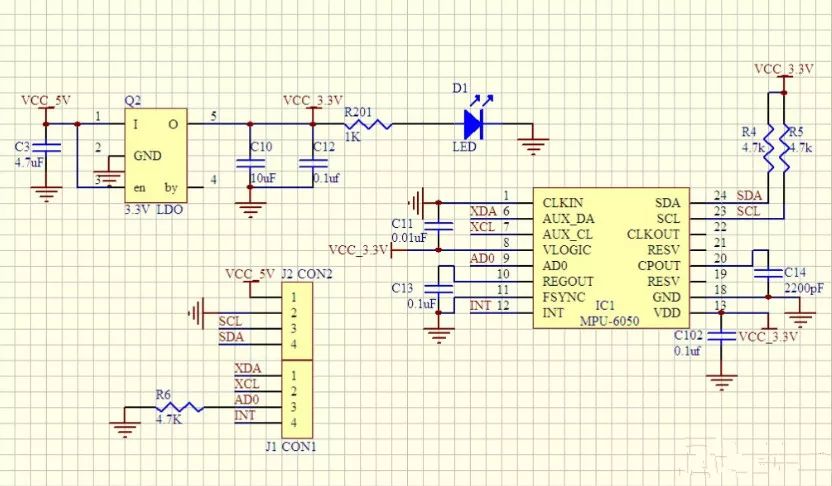
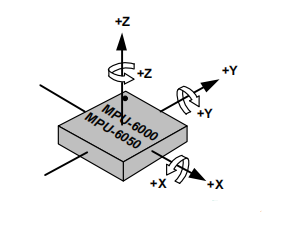
MPU-6050電路原理圖
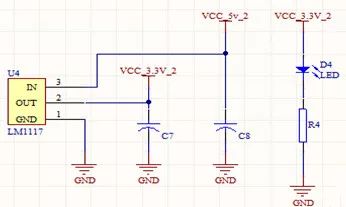
電源管理模塊四軸飛行器要求整體設計質量較輕,體積較小,因此在電池的選取方面,采用體積小、質量輕、容量大的鋰電池供電最合適。系統的核心芯片為STM32F103,常用工作電壓為3.3V,同時慣性測量傳感器,藍牙通信模塊的常規供電電壓也為3.3V,鋰電池的電壓為11.4V,要使系統正常工作,需要將11.4V的鋰電池電壓穩壓到3.3V。常用的78系列穩壓芯片已不再適用,必須選擇性能更好的穩壓芯片。
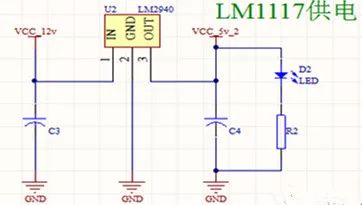
經綜合考慮,本電路采用LM1117-3.3和LM2940-5電源部分的核心芯片。電池電源經過LM2940-5降到5V后在輸入LM1117-3.3穩壓為3.3V。由于電機部分電流較大,故在飛控電路部分加入了過流保護,使用500mA的保險絲。
本設計是基于STM32F4的四軸航拍平臺。以STM32F407為控制核心,四軸飛行器為載體,輔以云臺的航拍系統。硬件上由飛控電路,電源管理等系統組成。其具有靈活輕盈,延展性,適應性強好等特點。在實際應用方面,四軸飛行器可以在復雜、危險的環境下可以完成特定的飛行任務,也可以用于監控交通,環境等。
-
STM32
+關注
關注
2272文章
10923瀏覽量
357544 -
四軸飛行器
+關注
關注
55文章
206瀏覽量
51224
原文標題:基于STM32四軸飛行器參考電路設計
文章出處:【微信號:elecfans,微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
飛行汽車興起,連接器/線纜將面臨哪些挑戰?
MATLAB在低空飛行器中的應用


欣旺達:已具備低空飛行器電池研發生產能力
嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
STM32復位電路用復位芯片和阻容復位電路區別
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧

中科宇航研發太空旅行飛行器,預計2028年開展太空邊緣載人旅游
STM32F103在電路板上怎樣做配套的電路設計呢?
上海峰飛航空領先全球低空飛行器領域,展望2040年
基于非線性自適應學習控制器的四軸飛行器避障方案
傳感器融合的工作原理
什么是姿態傳感器MPU6050





 工商網監
工商網監
評論