") Apollo代碼學(xué)習(xí)—MPC與LQR比較
Apollo代碼學(xué)習(xí)—MPC與LQR比較
LQR (線性二次調(diào)解器)理論是現(xiàn)代控制理論中發(fā)展最早也最為成熟的一種狀態(tài)空間設(shè)計(jì)法。特別可貴的是,LQR可得到狀態(tài)線性反饋的最優(yōu)控制規(guī)律,易于構(gòu)成閉環(huán)最優(yōu)控制。
LQR 最優(yōu)設(shè)計(jì)是指設(shè)計(jì)出的狀態(tài)反饋控制器 K 要使二次型目標(biāo)函數(shù) J 取最小值,而 K 由權(quán)矩陣 Q 與 R 唯一決定,故此 Q、R 的選擇尤為重要。
MPC(模型預(yù)測(cè)控制)是一種先進(jìn)的過程控制方法,在滿足一定約束條件的前提下,被用來(lái)實(shí)現(xiàn)過程控制,它的實(shí)現(xiàn)依賴于過程的動(dòng)態(tài)模型(通常為線性模型)。
在控制時(shí)域(一段有限時(shí)間)內(nèi),它主要針對(duì)當(dāng)前時(shí)刻進(jìn)行優(yōu)化,但也考慮未來(lái)時(shí)刻,求取當(dāng)前時(shí)刻的最優(yōu)控制解,然后反復(fù)優(yōu)化,從而實(shí)現(xiàn)整個(gè)時(shí)域的優(yōu)化求解。
本文由社區(qū)開發(fā)者——呂伊鵬撰寫,對(duì)MPC與LQR進(jìn)行了較為詳細(xì)的比較,希望這篇文給感興趣的同學(xué)帶來(lái)更多幫助。
Apollo中用到了PID、MPC和LQR三種控制器,其中,MPC和LQR控制器在狀態(tài)方程的形式、狀態(tài)變量的形式、目標(biāo)函數(shù)的形式等有諸多相似之處,因此結(jié)合自己目前了解到的信息,將兩者進(jìn)行一定的比較。
MPC(Model Predictive Control,模型預(yù)測(cè)控制)和LQR(Linear–Quadratic Regulator,線性二次調(diào)解器) 在狀態(tài)方程、控制實(shí)現(xiàn)等方面,有很多相似之處,但也有很多不同之處,如工作時(shí)域、最優(yōu)解等,基于各自的理論基礎(chǔ),從研究對(duì)象、狀態(tài)方程、目標(biāo)函數(shù)、求解方法等方面,對(duì)MPC和LQR做簡(jiǎn)要對(duì)比分析。
本文主要參考內(nèi)容:
【1】龔建偉,姜巖,徐威.無(wú)人駕駛車輛模型預(yù)測(cè)控制[M].北京理工大學(xué)出版社, 2014.
【2】Model predictive control-Wikipedia.
【3】Linear–quadratic regulator-Wikipedia.
【4】Inverted Pendulum: State-Space Methods for Controller Design.
【5】王金城. 現(xiàn)代控制理論[M]. 化學(xué)工業(yè)出版社, 2007。
LQR的研究對(duì)象是現(xiàn)代控制理論中以狀態(tài)空間方程形式給出的線性系統(tǒng)。MPC的研究對(duì)象可以是線性系統(tǒng),也可以是非線性系統(tǒng),只不過為了某些需求,如時(shí)效性,計(jì)算的便捷,操控性等,一般會(huì)將非線性系統(tǒng)轉(zhuǎn)換為線性系統(tǒng)進(jìn)行計(jì)算。非線性系統(tǒng)的線性化可參考上一篇文章。
Apollo中,LQR和MPC控制器都選用的單車動(dòng)力學(xué)模型作為研究對(duì)象,單車動(dòng)力學(xué)模型為非線性系統(tǒng),但LQR和MPC控制器的目的是為了求最優(yōu)控制解,在具體的優(yōu)化求解時(shí),均通過線性化方法將狀態(tài)方程轉(zhuǎn)化為線性方程進(jìn)行求解,所以,可以說(shuō)Apollo中LQR和MPC控制器的研究對(duì)象均為線性系統(tǒng)。
LQR的狀態(tài)方程多以微分方程的形式給出,如:

是一個(gè)連續(xù)線性系統(tǒng),在計(jì)算過程中需要轉(zhuǎn)換為如公式3的離散線性系統(tǒng)。
MPC的狀態(tài)方程可以為線性系統(tǒng),可以為非線性系統(tǒng),非線性系統(tǒng)形如下:

線性系統(tǒng)如公式3所示:

但LQR和MPC在計(jì)算求解時(shí)基本都是基于離散線性方程計(jì)算的。公式1可以很方便的轉(zhuǎn)化為公式3的形式。
按照維基百科的說(shuō)法:

LQR在一個(gè)固定的時(shí)域上求解,且一個(gè)時(shí)域內(nèi)只有一個(gè)最優(yōu)解,而MPC在一個(gè)逐漸消減的時(shí)域內(nèi)(in a receding time window)求解最優(yōu)解,且最優(yōu)解經(jīng)常更新。
可以結(jié)合MPC的滾動(dòng)優(yōu)化,以及圖1進(jìn)行理解:
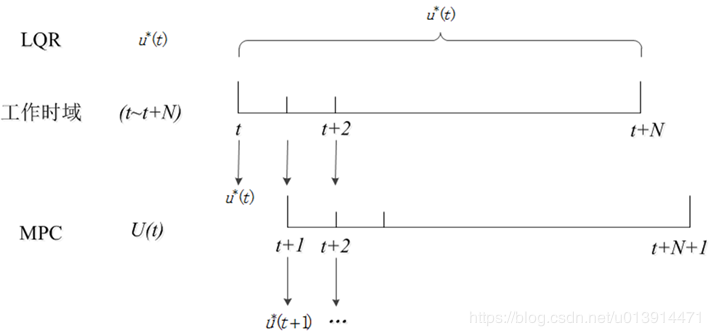
圖1 MPC和LQR的工作時(shí)域
針對(duì)同一工作時(shí)域[t,t+N],LQR在該時(shí)域中,有唯一最優(yōu)控制解u?(t),而MPC僅在t時(shí)刻有最優(yōu)解u?(t),但它會(huì)計(jì)算出一個(gè)控制序列U(t) ,并僅將序列的第一個(gè)值u?(t)作為控制量輸出給控制系統(tǒng),然后在下一采樣時(shí)間結(jié)合車輛當(dāng)前狀況求取下一個(gè)最優(yōu)控制解u?(t+1),這就是MPC所謂的滾動(dòng)優(yōu)化。
這么做的目的是為了使控制效果在一定時(shí)間內(nèi)可期,并且能根據(jù)控制效果盡早調(diào)整控制變量,使實(shí)際狀態(tài)更切合期望狀態(tài)。
此外,LQR的工作時(shí)域可以拓展到無(wú)限大,即可以求取無(wú)限時(shí)域的最優(yōu)控制解。而MPC只針對(duì)有限時(shí)域。
優(yōu)化求解問題一般離不開目標(biāo)函數(shù)的設(shè)計(jì)。
LQR的目標(biāo)函數(shù)的一般形式為:

其中, 終端狀態(tài),
終端狀態(tài),
正定的終端加權(quán)矩陣,x為狀態(tài)變量,多為各種誤差,u為控制變量,Q為半正定的狀態(tài)加權(quán)矩陣,R為正定的控制加權(quán)矩陣,實(shí)際應(yīng)用中,Q、R多為對(duì)角矩陣。
MPC的目標(biāo)函數(shù)的一般形式為:

其中,
從形式上可以看出,LQR的目標(biāo)函數(shù)為積分形式,MPC的目標(biāo)函數(shù)為求和形式,但其實(shí)都是對(duì)代價(jià)的累計(jì)。
兩者第一部分均為終端代價(jià)函數(shù),當(dāng)系統(tǒng)對(duì)終端狀態(tài)要求極嚴(yán)的情況下才添加,一般情況下可省略。
 跟蹤代價(jià),表示跟蹤過程中誤差的大小,
跟蹤代價(jià),表示跟蹤過程中誤差的大小, 控制代價(jià),表示對(duì)控制的約束或要求等。
控制代價(jià),表示對(duì)控制的約束或要求等。
正如工作時(shí)域所述,針對(duì)同一工作時(shí)域,LQR有唯一最優(yōu)控制解,也就是在該控制周期內(nèi),LQR只進(jìn)行一次計(jì)算。
而MPC滾動(dòng)優(yōu)化的思想,使其給出該時(shí)域內(nèi)的一組控制序列對(duì)應(yīng)不同的采樣時(shí)刻(采樣周期和控制周期不一定相同),但是只將該序列的第一個(gè)值輸出給被控系統(tǒng),作為該時(shí)刻的最優(yōu)控制解。
因此,對(duì)于工作時(shí)域[t,t+N],LQR只有唯一解,對(duì)于線性MPC,本質(zhì)是凸優(yōu)化問題,只有唯一解;但非線性MPC,可能會(huì)有N個(gè)local optimal。
最優(yōu)控制解的求取多基于目標(biāo)函數(shù)進(jìn)行,取線性約束下的目標(biāo)函數(shù)的極值為最優(yōu)控制解。對(duì)于系統(tǒng)為線性,目標(biāo)函數(shù)為狀態(tài)變量和控制變量的二次型函數(shù)的線性二次性問題,最優(yōu)解具有統(tǒng)一的解析表達(dá)式。
Apollo中的MPC將優(yōu)化問題轉(zhuǎn)化為二次規(guī)劃問題,利用二次規(guī)劃求解器進(jìn)行求解。橫向控制中用的是LQR調(diào)節(jié)器,它通過假設(shè)控制量u(t)不受約束,利用變分法求解。
此外,LQR對(duì)整個(gè)時(shí)域進(jìn)行優(yōu)化求解,且求解過程中假設(shè)控制量不受約束,但是實(shí)際情況下,控制量是有約束的。
而MPC通常在比整個(gè)時(shí)域更小的時(shí)間窗口中解決優(yōu)化問題,因此可能獲得次優(yōu)解,且對(duì)線性不作任何假設(shè),它能夠處理硬約束以及非線性系統(tǒng)偏離其線性化工作點(diǎn)的遷移,這兩者都是MPC的缺點(diǎn)。
-
線性系統(tǒng)
+關(guān)注
關(guān)注
0文章
43瀏覽量
14735 -
Apollo
+關(guān)注
關(guān)注
5文章
343瀏覽量
18510 -
LQR
+關(guān)注
關(guān)注
1文章
6瀏覽量
3159
原文標(biāo)題:開發(fā)者說(shuō) | Apollo代碼學(xué)習(xí)—MPC與LQR比較
文章出處:【微信號(hào):Apollo_Developers,微信公眾號(hào):Apollo開發(fā)者社區(qū)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
LQR線性二次調(diào)制系統(tǒng)的記錄
如何對(duì)Apollo2.5 CANBUS進(jìn)行全面調(diào)試?
Apollo Heritage版音頻接口附帶的插件
MPC8240與MPC106的性能比較
MPC8240與MPC106的性能比較

一級(jí)倒立擺的LQR控制與遺傳算法下的LQR控制算法
MPC82系列MCU的ADC(模數(shù)轉(zhuǎn)換)采樣代碼

LQR控制算法之最優(yōu)控制

Matlab/yalmip工具編寫自動(dòng)駕駛模型預(yù)測(cè)控制(MPC)代碼





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論