") 人工智能在自動駕駛技術(shù)中的應(yīng)用概述
人工智能在自動駕駛技術(shù)中的應(yīng)用概述
隨著技術(shù)的快速發(fā)展云計算、大數(shù)據(jù)、人工智能一些新名詞進入大眾的視野,人工智能是人類進入信息時代后的又一技術(shù)革命正受到越來越廣泛的重視。作為人工智能技術(shù)在汽車行業(yè)、交通領(lǐng)域的延伸與應(yīng)用,無人駕駛近幾年在世界范圍內(nèi)受到了產(chǎn)學(xué)界甚至國家層面的密切關(guān)注。
自動駕駛汽車依靠人工智能、視覺計算、雷達、監(jiān)控裝置和全球定位系統(tǒng)協(xié)同合作,讓電腦可以在沒有任何人類主動的操作下,自動安全地操作機動車輛。自動駕駛技術(shù)將成為未來汽車一個全新的發(fā)展方向。
本文將主要介紹人工智能技術(shù)在自動駕駛中的應(yīng)用領(lǐng)域,并對自動技術(shù)的發(fā)展前景進行一個簡單的分析。
人工智能是一門起步晚卻發(fā)展快速的科學(xué)。20 世紀以來科學(xué)工作者們不斷尋求著賦予機器人類智慧的方法。現(xiàn)代人工智能這一概念是從英國科學(xué)家圖靈的尋求智能機發(fā)展而來,直到1937年圖靈發(fā)表的論文《理想自動機》給人工智能下了嚴格的數(shù)學(xué)定義,現(xiàn)實世界中實際要處理的很多問題不能單純地是數(shù)值計算,如言語理解與表達、圖形圖像及聲音理解、醫(yī)療診斷等等。
1955 年Newell 和Simon 的Logic Theorist證明了《數(shù)學(xué)原理》中前52 個定理中的38 個。Simon 斷言他們已經(jīng)解決了物質(zhì)構(gòu)成的系統(tǒng)如何獲得心靈性質(zhì)的問題( 這種論斷在后來的哲學(xué)領(lǐng)域被稱為“強人工智能”) ,認為機器具有像人一樣邏輯思維的能力。1956 年,“人工智能”( AI) 由美國的JohnMcCarthy 提出,經(jīng)過早期的探索階段,人工智能向著更加體系化的方向發(fā)展,至此成為一門獨立的學(xué)科。
五十年代,以游戲博弈為對象開始了人工智能的研究;六十年代,以搜索法求解一般問題的研究為主;七十年代,人工智能學(xué)者進行了有成效的人工智能研究;八十年代,開始了不確定推理、非單調(diào)推理、定理推理方法的研究;九十年代,知識表示、機器學(xué)習(xí)、分布式人工智能等基礎(chǔ)性研究方面都取得了突破性的進展。
人工智能發(fā)展六十年,幾起幾落,如今迎來又一次熱潮,深度學(xué)習(xí)、計算機視覺和自然語言理解等各方面的突破,使得許多曾是天方夜譚的應(yīng)用成為可能,無人駕駛汽車就是其中之一。作為人工智能等技術(shù)在汽車行業(yè)、交通領(lǐng)域的延伸與應(yīng)用,無人駕駛近幾年在世界范圍內(nèi)受到了產(chǎn)學(xué)界甚至國家層面的密切關(guān)注。目前,人工智能在汽車自動駕駛技術(shù)中也有了廣泛應(yīng)用。
自動駕駛汽車依靠人工智能、視覺計算、雷達、監(jiān)控裝置和全球定位系統(tǒng)協(xié)同合作,它是一個集環(huán)境感知、規(guī)劃決策、多等級輔助駕駛等功能于一體的綜合系統(tǒng),它集中運用了計算機、現(xiàn)代傳感、信息融合、通訊、人工智能及自動控制等技術(shù), 是典型的高新技術(shù)綜合體。
這種汽車能和人一樣會“思考” 、“判斷”、“行走” ,讓電腦可以在沒有任何人類主動的操作下,自動安全地操作機動車輛 。按照SAE(美國汽車工程師協(xié)會)的分級,共分為:駕駛員輔助、部分自動駕駛、有條件自動駕駛、高度自動駕駛、完全自動駕駛五個層級。
第一階段:駕駛員輔助目的是為駕駛者提供協(xié)助,包括提供重要或有益的駕駛相關(guān)信息,以及在形勢開始變得危急的時候發(fā)出明確而簡潔的警告。現(xiàn)階段大部分ADAS主動安全輔助系統(tǒng),讓車輛能夠?qū)崿F(xiàn)感知和干預(yù)操作。例如防抱死制動系統(tǒng)(ABS)、電子穩(wěn)定性控制(ESC)、車道偏離警告系統(tǒng)、正面碰撞警告系統(tǒng)、盲點信息系統(tǒng)等等,此時車輛是能夠通過攝像頭、雷達傳感器獲知周圍交通狀況,進而做出警示和干預(yù)。
第二階段:部分自動駕駛車輛通過攝像頭、雷達傳感器、激光傳感器等等設(shè)備獲取道路以及周邊交通信息,車輛會自行對方向盤和加減速中的多項操作提供駕駛支援,在駕駛者收到警告卻未能及時采取相應(yīng)行動時能夠自動進行干預(yù),其他操作交由駕駛員,實現(xiàn)人機共駕,但車輛不允許駕駛員的雙手脫離方向盤。例如自適應(yīng)巡航控制(ACC)、車道保持輔助系統(tǒng)(LKA)、自動緊急制動(AEB)系統(tǒng)、車道偏離預(yù)警(LDW)等。
第三階段:有條件自動駕駛由自動駕駛系統(tǒng)完成駕駛操作,根據(jù)路況條件所限,必要時發(fā)出系統(tǒng)請求,必須交由駕駛員駕駛。
第四階段:高度自動駕駛由自動駕駛系統(tǒng)完成所有駕駛操作,根據(jù)系統(tǒng)請求,駕駛員可以不接管車輛。車輛已經(jīng)可以完成自動駕駛,一旦出現(xiàn)自動駕駛系統(tǒng)無法招架的情形,車輛也可以自行調(diào)整完成自動駕駛,駕駛員不需要干涉。
第五階段:完全自動駕駛自動駕駛的理想形態(tài),乘客只需提供目的地,無論任何路況,任何天氣,車輛均能夠?qū)崿F(xiàn)自動駕駛。這種自動化水平允許乘客從事計算機工作、休息和睡眠以及其他娛樂等活動,在任何時候都不需要對車輛進行監(jiān)控。
自動駕駛的實現(xiàn)
車輛實現(xiàn)自動駕駛,必須經(jīng)由三大環(huán)節(jié):
第一,感知。也就是讓車輛獲取,不同的系統(tǒng)需要由不同類型的車用感測器,包含毫米波雷達、超聲波雷達、紅外雷達、雷射雷達、CCD \CMOS影像感測器及輪速感測器等來收集整車的工作狀態(tài)及其參數(shù)變化情形。
第二,處理。也就是大腦將感測器所收集到的資訊進行分析處理,然后再向控制的裝置輸出控制訊號。
第三,執(zhí)行。依據(jù)ECU輸出的訊號,讓汽車完成動作執(zhí)行。其中每一個環(huán)節(jié)都離不開人工智能技術(shù)的基礎(chǔ)。
人工智能在自動駕駛定位技術(shù)中的應(yīng)用
定位技術(shù)是自動駕駛車輛行駛的基礎(chǔ)。目前常用的技術(shù)包括線導(dǎo)航、磁導(dǎo)航、無線導(dǎo)航、視覺導(dǎo)航、導(dǎo)航、激光導(dǎo)航等。
其中磁導(dǎo)航是目前最成熟可靠的方案,現(xiàn)有大多數(shù)應(yīng)用均采用這種導(dǎo)航技術(shù)。磁導(dǎo)航技術(shù)通過在車道上埋設(shè)磁性標(biāo)志來給車輛提供車道的邊界信息,磁性材料具有好的環(huán)境適應(yīng)性,它對雨天,冰雪覆蓋,光照不足甚至無光照的情況都可適應(yīng),不足之處是需要對現(xiàn)行的道路設(shè)施作出較大的改動,成本較高。同時磁性導(dǎo)航技術(shù)無法預(yù)知車道前方的障礙,因而不可能單獨使用。
視覺導(dǎo)航對基礎(chǔ)設(shè)施的要求較低,被認為是最有前景的導(dǎo)航方法。在高速路和城市環(huán)境中視覺方法受到了較大的關(guān)注。
人工智能在自動駕駛圖像識別與感知中的應(yīng)用
無人駕駛汽車感知依靠傳感器。目前傳感器性能越來越高、體積越來越小、功耗越來越低,其飛速發(fā)展是無人駕駛熱潮的重要推手。反過來,無人駕駛又對車載傳感器提出了更高的要求,又促進了其發(fā)展。
用于無人駕駛的傳感器可以分為四類:
雷達傳感器
主要用來探測一定范圍內(nèi)障礙物(比如車輛、行人、路肩等)的方位、距離及移動速度,常用車載雷達種類有激光雷達、毫米波雷達和超聲波雷達。激光雷達精度高、探測范圍廣,但成本高,比如Google無人車頂上的64線激光雷達成本高達70多萬元人民幣;毫米波雷達成本相對較低,探測距離較遠,被車企廣泛使用,但與激光雷達比精度稍低、可視角度偏小;超聲波雷達成本最低,但探測距離近、精度低,可用于低速下碰撞預(yù)警。
視覺傳感器
主要用來識別車道線、停止線、交通信號燈、交通標(biāo)志牌、行人、車輛等。常用的有單目攝像頭、雙目攝像頭、紅外攝像頭。視覺傳感器成本低,相關(guān)研究與產(chǎn)品非常多,但視覺算法易受光照、陰影、污損、遮擋影響,準(zhǔn)確性、魯棒性有待提高。所以,作為人工智能技術(shù)廣泛應(yīng)用的領(lǐng)域之一的圖像識別,也是無人駕駛汽車領(lǐng)域的一個研究熱點。
定位及位姿傳感器
主要用來實時高精度定位以及位姿感知,比如獲取經(jīng)緯度坐標(biāo)、速度、加速度、航向角等,一般包括全球衛(wèi)星定位系統(tǒng)(GNSS)、慣性設(shè)備、輪速計、里程計等。現(xiàn)在國內(nèi)常用的高精度定位方法是使用差分定位設(shè)備,如RTK-GPS,但需要額外架設(shè)固定差分基站,應(yīng)用距離受限,而且易受建筑物、樹木遮擋影響。近年來很多省市的測繪部門都架設(shè)了相當(dāng)于固定差分基站的連續(xù)運行參考站系統(tǒng)(CORS),比如遼寧、湖北、上海等,實現(xiàn)了定位信號的大范圍覆蓋,這種基礎(chǔ)設(shè)施建設(shè)為智能駕駛提供了有力的技術(shù)支撐。定位技術(shù)是無人駕駛的核心技術(shù),因為有了位置信息就可以利用豐富的地理、地圖等先驗知識,可以使用基于位置的服務(wù)。
車身傳感器
來自車輛本身,通過整車網(wǎng)絡(luò)接口獲取諸如車速、輪速、檔位等車輛本身的信息。
人工智能在自動駕駛深度學(xué)習(xí)中的應(yīng)用
駕駛員認知靠大腦,無人駕駛汽車的“大腦”則是計算機。無人車里的計算機與我們常用的臺式機、筆記本略有不同,因為車輛在行駛的時候會遇到顛簸、震動、粉塵甚至高溫的情況,一般計算機無法長時間運行在這些環(huán)境中。所以無人車一般選用工業(yè)環(huán)境下的計算機——工控機。
工控機上運行著操作系統(tǒng),操作系統(tǒng)中運行著無人駕駛軟件。如圖1所示為某無人駕駛車軟件系統(tǒng)架構(gòu)。操作系統(tǒng)之上是支撐模塊(這里模塊指的是計算機程序),對上層軟件模塊提供基礎(chǔ)服務(wù)。
支撐模塊包括:虛擬交換模塊,用于模塊間通信;日志管理模塊,用于日志記錄、檢索以及回放;進程監(jiān)控模塊,負責(zé)監(jiān)視整個系統(tǒng)的運行狀態(tài),如果某個模塊運行不正常則提示操作人員并自動采取相應(yīng)措施;交互調(diào)試模塊,負責(zé)開發(fā)人員與無人駕駛系統(tǒng)交互。
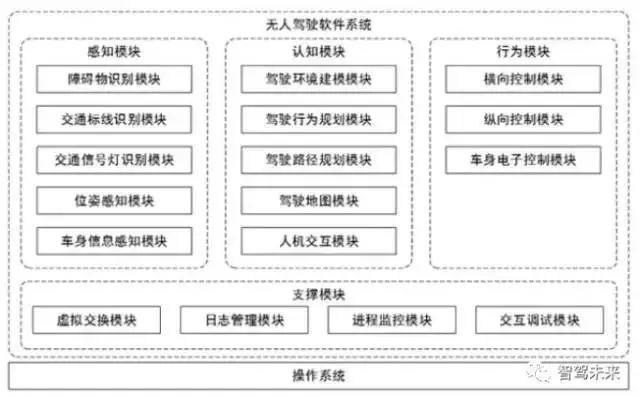
圖:某無人駕駛車軟件系統(tǒng)架構(gòu)
除了對外界進行認知之外,機器還必須要能夠進行學(xué)習(xí)。深度學(xué)習(xí)是無人駕駛技術(shù)成功地基礎(chǔ),深度學(xué)習(xí)是源于人工神經(jīng)網(wǎng)絡(luò)的一種高效的機器學(xué)習(xí)方法。深度學(xué)習(xí)可以提高汽車識別道路、行人、障礙物等的時間效率,并保障了識別的正確率。通過大量數(shù)據(jù)的訓(xùn)練之后,汽車可以將收集到的圖形,電磁波等信息轉(zhuǎn)換為可用的數(shù)據(jù),利用深度學(xué)習(xí)算法實現(xiàn)無人駕駛。
在無人駕駛汽車通過雷達等收集到數(shù)據(jù)時,對于原始的訓(xùn)練數(shù)據(jù)要首先進行數(shù)據(jù)的預(yù)處理化。計算均值并對數(shù)據(jù)的均值做均值標(biāo)準(zhǔn)化、對原始數(shù)據(jù)做主成分分析、使用PCA白化或ZCA白化。例如:將激光傳感器收集到的時間數(shù)據(jù)轉(zhuǎn)換為車與物體之間的距離;將車載攝像頭拍攝到的照片信息轉(zhuǎn)換為對路障的判斷,對紅綠燈的判斷,對行人的判斷等;雷達探測到的數(shù)據(jù)轉(zhuǎn)換為各個物體之間的距離。
將深度學(xué)習(xí)應(yīng)用于無人駕駛汽車中,主要包含以下步驟:
1. 準(zhǔn)備數(shù)據(jù),對數(shù)據(jù)進行預(yù)處理再選用合適的數(shù)據(jù)結(jié)構(gòu)存儲訓(xùn)練數(shù)據(jù)和測試元組;
2. 輸入大量數(shù)據(jù)對第一層進行無監(jiān)督學(xué)習(xí);
3. 通過第一層對數(shù)據(jù)進行聚類,將相近的數(shù)據(jù)劃分為同一類,隨機進行判斷;
4. 運用監(jiān)督學(xué)習(xí)調(diào)整第二層中各個節(jié)點的閥值,提高第二層數(shù)據(jù)輸入的正確性;
5. 用大量的數(shù)據(jù)對每一層網(wǎng)絡(luò)進行無監(jiān)督學(xué)習(xí),并且每次用無監(jiān)督學(xué)習(xí)只訓(xùn)練一層,將其訓(xùn)練結(jié)果作為其更高一層的輸入。
6. 輸入之后用監(jiān)督學(xué)習(xí)去調(diào)整所有層。
人工智能在自動駕駛信息共享中的應(yīng)用
首先,利用無線網(wǎng)絡(luò)進行車與車之間的信息共享。通過專用通道,一輛汽車可以把自己的位置、路況實時分享給隊里的其它汽車,以便其它車輛的自動駕駛系統(tǒng),在收到信息后做出相應(yīng)調(diào)整。
其次,是3D路況感應(yīng),車輛將結(jié)合超聲波傳感器、攝像機、雷達和激光測距等技術(shù),檢測出汽車前方約5米內(nèi)地形地貌,判斷前方是柏油路還是碎石、草地、沙灘等路面,根據(jù)地形自動改變汽車設(shè)置。
另外,汽車還將能進行自動變速,一旦探測到地形發(fā)生改變,可以自動減速,路面恢復(fù)正常后,再回到原先狀態(tài)。
汽車信息共享所收集到的交通信息量將非常巨大,如果不對這些數(shù)據(jù)進行有效處理和利用,就會迅速被信息所湮沒。因此需要采用數(shù)據(jù)挖掘、人工智能等方式提取有效信息,同時過濾掉無用信息。考慮到車輛行駛過程中需要依賴的信息具有很大的時間和空間關(guān)聯(lián)性,因此有些信息的處理需要非常及時。
人工智能應(yīng)用于自動駕駛技術(shù)中的優(yōu)勢
人工智能算法更側(cè)重于學(xué)習(xí)功能,其他算法更側(cè)重于計算功能。學(xué)習(xí)是智能的重要體現(xiàn),學(xué)習(xí)功能是人工智能的重要特征,現(xiàn)階段大多人工智能技術(shù)還處在學(xué)的階段。如前文所說,無人駕駛實際上是類人駕駛,是智能車向人類駕駛員學(xué)習(xí)如何感知交通環(huán)境,如何利用已有的知識和駕駛經(jīng)驗進行決策和規(guī)劃,如何熟練地控制方向盤、油門和剎車。
從感知、認知、行為三個方面看,感知部分難度最大,人工智能技術(shù)應(yīng)用最多。感知技術(shù)依賴于傳感器,比如攝像頭,由于其成本低,在產(chǎn)業(yè)界倍受青睞。以色列一家名叫Mobileye的公司在交通圖像識別領(lǐng)域做得非常好,它通過一個攝像頭可以完成交通標(biāo)線識別、交通信號燈識別、行人檢測,甚至可以區(qū)別前方是自行車、汽車還是卡車。
人工智能技術(shù)在圖像識別領(lǐng)域的成功應(yīng)用莫過于深度學(xué)習(xí),近幾年研究人員通過卷積神經(jīng)網(wǎng)絡(luò)和其它深度學(xué)習(xí)模型對圖像樣本進行訓(xùn)練,大大提高了識別準(zhǔn)確率。Mobileye目前取得的成果,正是得益于該公司很早就將深度學(xué)習(xí)當(dāng)作一項核心技術(shù)進行研究。 認知與控制方面,主要使用人工智能領(lǐng)域中的傳統(tǒng)機器學(xué)習(xí)技術(shù),通過學(xué)習(xí)人類駕駛員的駕駛行為建立駕駛員模型,學(xué)習(xí)人的方式駕駛汽車。
無人駕駛技術(shù)所面臨的挑戰(zhàn)和展望
在目前交通出行狀況越來越惡劣的背景下,“無人駕駛”汽車的商業(yè)化前景,還受很多因素制約。
主要有:
1. 法規(guī)障礙
2. 不同品牌車型間建立共同協(xié)議,行業(yè)缺少規(guī)范和標(biāo)準(zhǔn)
3. 基礎(chǔ)道路狀況,標(biāo)識和信息準(zhǔn)確性,信息網(wǎng)絡(luò)的安全性
4. 難以承受的高昂成本
此外,“無人駕駛”汽車的一個最大特點,就是車輛網(wǎng)絡(luò)化、信息化程度極高,而這也對電腦系統(tǒng)的安全問題形成極大挑戰(zhàn)。一旦遇到電腦程序錯亂或者信息網(wǎng)絡(luò)被入侵的情況,如何繼續(xù)保證自身車輛以及周圍其他車輛的行駛安全,這同樣是未來急需解決的問題。 雖然無人駕駛技術(shù)還存在著很多挑戰(zhàn),但是無人駕駛難在感知,重在“學(xué)習(xí)”,無人駕駛的技術(shù)水平遲早會超過人類,因為穩(wěn)、準(zhǔn)、快是機器的先天優(yōu)勢,人類無法與之比擬。
駕駛有時并不是負擔(dān),相反是一種樂趣,體現(xiàn)了人類拓展自身極限的能力。筆者相信,完全的無人駕駛也許有些遙遠,但隨著機器學(xué)習(xí)算法的提升和應(yīng)用的挖掘,更接地氣人機和諧共駕指日可待。不管在自動駕駛這條路上有多少困難,但我相信總有它出現(xiàn)在城市道路上的一天,技術(shù)的發(fā)展充滿激情與動力。在不久的將來,也許自動駕駛會成為主流。
-
人工智能
+關(guān)注
關(guān)注
1796文章
47683瀏覽量
240313 -
自動駕駛
+關(guān)注
關(guān)注
785文章
13932瀏覽量
167016
原文標(biāo)題:詳述人工智能在自動駕駛技術(shù)中的應(yīng)用
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
什么是具身智能?自動駕駛是具身智能嗎?
智能駕駛技術(shù)發(fā)展趨勢
人工智能的應(yīng)用領(lǐng)域有自動駕駛嗎
淺談自動駕駛技術(shù)的現(xiàn)狀及發(fā)展趨勢
自動駕駛技術(shù)的典型應(yīng)用 自動駕駛技術(shù)涉及到哪些技術(shù)
Autobrains推出自動駕駛定位技術(shù)
《AI for Science:人工智能驅(qū)動科學(xué)創(chuàng)新》第6章人AI與能源科學(xué)讀后感
生成式人工智能在教育中的應(yīng)用
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
人工智能駕駛技術(shù)包括哪些技術(shù)
深度學(xué)習(xí)在自動駕駛中的關(guān)鍵技術(shù)
智能駕駛大模型:有望顯著提升自動駕駛系統(tǒng)的性能和魯棒性






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論