 關于機器視覺選型問題
關于機器視覺選型問題
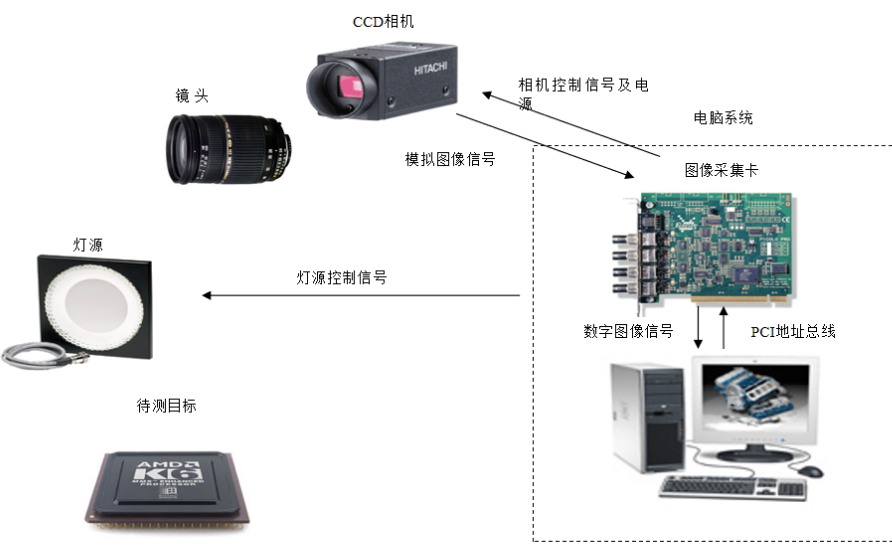
相機和鏡頭是機器視覺中重要的組成部分,合適的相機和鏡頭決定了系統的好壞。但是大部分的小伙伴們對如何選擇工業用相機和合適的鏡頭上犯了難。這不?小編就帶來了選型的私家珍藏,本文呢?主要介紹如何選擇相機與對應的鏡頭。前面小編也有推送關于相機鏡頭相關干貨,有興趣的你可以結合本文一起看。
01
圖像獲取---最佳視野
最佳視野(FOV):讓視覺系統“關心”的部分盡可能“充滿”視野。通俗來說,FOV越小越“好”。
*相機分辨率相同視野越小系統精度越高
*視野相同相機分辨率越高系統精度越高
02
圖像獲取---高系統精度
系統精度(System accuracy):
X方向系統精度(X方向象素值)= 視野范圍(X方向)/ CCD芯片象素數量(X方向)
Y方向系統精度(Y方向象素值)= 視野范圍(Y方向) / CCD芯片象素數量(Y方向)
*在選擇相機時,特別是進行尺寸測量的場合,為了提高系統的穩定性,一般要求視覺系統的理論精度大于實際精度
例如:
采用視覺系統測量圓孔的直徑,圓孔大小為4±0.1mm,測量精度為0.02mm,視覺系統水平方向的視野為5mm。
Step 01 精度擴大: 選擇4個像素對應0.02mm-->視覺系統精度擴大到0.02mm/4像素=0.005mm/pixel
Step 02計算最小分辨率: 相機水平方向像素數量≥水平方向視野/水平方向精度=5mm/0.005mm/pixel=1000pixel
Step 03 確定相機:選擇1280*1024分辨率 130W像素的相機即可。
03
圖像獲取.---成像清晰
成像清晰:
確定圖像中所要檢測的部分處于清晰的焦距之內
當圖像中檢測部分不處于同一焦平面時,需要考慮鏡頭的景深
*每一款鏡頭都有固定的“最短焦距”。
*每一款鏡頭相對于固定的光圈,都有自己固定的景深。
*縮小光圈可以加大景深,同時為保證正確曝光需要提高光強。
*小光圈拍照,可以使圖像獲得更多“細節”,圖像效果更好。
04
圖像獲取---避免畸變
避免畸變(在定位及高精度測量的系統中,鏡頭畸變的影響尤其重要)
*使用遠心鏡頭
*進行系統標定,進行圖像校正
05
圖像獲取---待測部分反差最大化
對于一個視覺系統來說,“黑白分明”的圖像才是好圖像--->選擇適合的光源
06
圖像獲取. 小結
1.獲得完美圖像的要素及控制因素
2.高系統精度-->視野、相機分辨率
3.清晰成象-->鏡頭、光源
4.避免畸變-->鏡頭、系統標定
5.保持待測物體在成象中大小一致-->視野、拍照角度、待測物位置
6.反差最大化-->光源
7.恰當的照明與曝光-->光源、鏡頭
-
機器視覺
+關注
關注
162文章
4406瀏覽量
120737
原文標題:一分鐘帶你了解機器視覺如何選型。。。
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
機器視覺光源選型技術要點
基于ZYNQ的機器視覺應用
機器視覺光源選型
NI機器視覺選型指南

機器視覺中光源選型的基本要素
超實用的機器視覺傳感器選型指南
機器視覺中光源選型基本要素
機器視覺選型方式!






 工商網監
工商網監
評論