") 淺析機(jī)器人自主定位導(dǎo)航技術(shù)
淺析機(jī)器人自主定位導(dǎo)航技術(shù)
SLAM技術(shù)作為機(jī)器人自主移動的關(guān)鍵技術(shù),讓很多人都誤解為:SLAM=機(jī)器人自主定位導(dǎo)航。
其實(shí),SLAM≠機(jī)器人自主定位導(dǎo)航,不解決行動問題。
SLAM如其名一樣,主要解決的是機(jī)器人的地圖構(gòu)建和即時(shí)定位問題,而自主導(dǎo)航需要解決的是智能移動機(jī)器人與環(huán)境進(jìn)行自主交互,尤其是點(diǎn)到點(diǎn)自主移動的問題,這需要更多的技術(shù)支持。
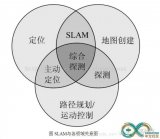
要想解決機(jī)器人智能移動這個(gè)問題,除了要有SLAM技術(shù)之外,還需要加入路徑規(guī)劃和運(yùn)動控制。在SLAM技術(shù)幫助機(jī)器人確定自身定位和構(gòu)建地圖之后,進(jìn)行一個(gè)叫做目標(biāo)點(diǎn)導(dǎo)航的能力。通俗的說,就是規(guī)劃一條從A點(diǎn)到B點(diǎn)的路徑出來,然后讓機(jī)器人移動過去。
機(jī)器人自主定位導(dǎo)航= SLAM+路徑規(guī)劃和運(yùn)動控制
運(yùn)動規(guī)劃主要分為:全局規(guī)劃、局部規(guī)劃。
全局規(guī)劃
全局規(guī)劃,顧名思義,是最上層的運(yùn)動規(guī)劃邏輯,它按照機(jī)器人預(yù)先記錄的環(huán)境地圖并結(jié)合機(jī)器人當(dāng)前位姿以及任務(wù)目標(biāo)點(diǎn)的位置,在地圖上找到前往目標(biāo)點(diǎn)最快捷的路徑。
局部規(guī)劃
當(dāng)環(huán)境出現(xiàn)變化或者上層規(guī)劃的路徑不利于機(jī)器人實(shí)際行走的時(shí)候(比如機(jī)器人在行走的過程中遇到障礙物),局部路徑規(guī)劃將做出微調(diào)。
這兩個(gè)層次的規(guī)劃模塊協(xié)同工作,機(jī)器人就可以很好的實(shí)現(xiàn)從A點(diǎn)到B點(diǎn)的智能移動了。不過實(shí)際工作環(huán)境下,上述配置還不夠。因?yàn)檫\(yùn)動規(guī)劃的過程中還包含靜態(tài)地圖和動態(tài)地圖兩種情況。
A*算法
A*(A-Star)算法是一種靜態(tài)路網(wǎng)中求解最短路徑最有效的直接搜索方法,也是解決許多搜索問題的有效算法。算法中的距離估算值與實(shí)際值越接近,最終搜索速度越快。但是,A*算法同樣也可用于動態(tài)路徑規(guī)劃當(dāng)中,只是當(dāng)環(huán)境發(fā)生變化時(shí),需要重新規(guī)劃路線。
D*算法
D*算法則是一種動態(tài)啟發(fā)式路徑搜索算法,它事先對環(huán)境位置,讓機(jī)器人在陌生環(huán)境中行動自如,在瞬息萬變的環(huán)境中游刃有余。D*算法的最大優(yōu)點(diǎn)是不需要預(yù)先探明地圖,機(jī)器人可以和人一樣,即使在未知環(huán)境中,也可以展開行動,隨著機(jī)器人不斷探索,路徑也會時(shí)刻調(diào)整。
上述的幾種算法都是目前絕大部分機(jī)器人所需要的路徑規(guī)劃算法,能夠讓機(jī)器人跟人一樣智能,快速規(guī)劃A到B點(diǎn)的最短路徑,并在遇到障礙物的時(shí)候知道如何處理。但掃地機(jī)器人作為最早出現(xiàn)在消費(fèi)市場的服務(wù)機(jī)器人之一,它需要的路徑規(guī)劃算法更為復(fù)雜。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28641瀏覽量
208407 -
SLAM
+關(guān)注
關(guān)注
23文章
426瀏覽量
31929
原文標(biāo)題:機(jī)器人自主定位導(dǎo)航=SLAM+運(yùn)動規(guī)劃
文章出處:【微信號:ofweekgongkong,微信公眾號:OFweek工控】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【HiKey申請】自主導(dǎo)航機(jī)器人
激光導(dǎo)航AGV底盤定制 巡檢機(jī)器人,服務(wù)機(jī)器人,智慧物流搬運(yùn)AGV
機(jī)器人想要實(shí)現(xiàn)智能移動,必須具備超強(qiáng)的自主定位導(dǎo)航能力
SLAM不等于機(jī)器人自主定位導(dǎo)航
服務(wù)機(jī)器人是如何實(shí)現(xiàn)自主定位導(dǎo)航的?
中國服務(wù)機(jī)器人定位導(dǎo)航技術(shù)現(xiàn)狀分析
怎么構(gòu)建一張滿足機(jī)器人導(dǎo)航需求的地圖?
如何對ROS機(jī)器人的定位導(dǎo)航進(jìn)行仿真
【科普】干貨!帶你從0了解移動機(jī)器人(三) ——自主導(dǎo)航系統(tǒng)及上位機(jī)軟件設(shè)計(jì)與實(shí)現(xiàn)
視覺定位和超聲波定位等機(jī)器人自主定位導(dǎo)航的優(yōu)缺點(diǎn)
自主定位導(dǎo)航技術(shù)對機(jī)器人到底有多重要
SLAM+運(yùn)動規(guī)劃=機(jī)器人自主定位導(dǎo)航
思嵐科技模塊化自主定位導(dǎo)航SLAMWARE解決機(jī)器人避障問題
定位是機(jī)器人實(shí)現(xiàn)自主導(dǎo)航的基本環(huán)節(jié)
淺析基于SLAM的機(jī)器人自主定位導(dǎo)航





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論