") 西門子S7-200PLC的介紹及控制伺服和步進(jìn)電機(jī)的詳細(xì)資料概述
西門子S7-200PLC的介紹及控制伺服和步進(jìn)電機(jī)的詳細(xì)資料概述
S7-200 有兩個 置PTO/PWM 發(fā)生器,用以建立高速脈沖串(PTO)或脈寬調(diào)節(jié)(PWM) 信號波形。
當(dāng)組態(tài)一個輸出為PTO 操作時,生成一個50%占空比脈沖串用于步進(jìn)電機(jī)或伺服電機(jī)的速度和位置的開環(huán)控制。 置PTO 功能提供了脈沖串輸出,脈沖周期和數(shù)量可由用戶控制。但應(yīng)用程序必須通過PLC內(nèi)置I/O 提供方向和限位控制。
為了簡化用戶應(yīng)用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向?qū)Э梢詭椭趲追昼妰?nèi)全部完成PWM,PTO 或位控模塊的組態(tài)。向?qū)Э梢陨晌恢弥噶睿脩艨梢杂眠@些指令在其應(yīng)用程序中為速度和位置提供動態(tài)控制。
2、開環(huán)位控用于步進(jìn)電機(jī)或伺服電機(jī)的基本信息
借助位控向?qū)ЫM態(tài)PTO 輸出時,需要用戶提供一些基本信息,逐項(xiàng)介紹如下:
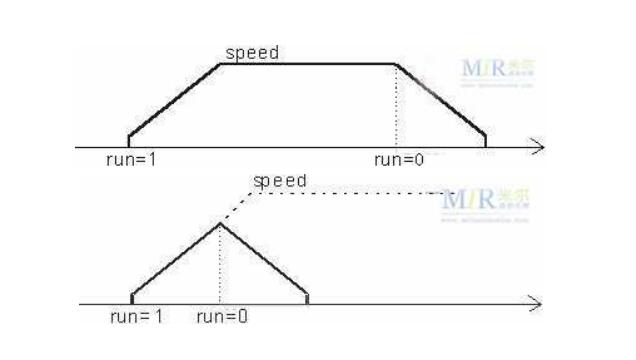
⑴ 最大速度 (MAX_SPEED)和啟動/停止速度 (SS_SPEED)
圖1是這2 個概念的示意圖。
MAX_SPEED 是允許的操作速度的最大值,它應(yīng)在電機(jī)力矩能力的范圍 。 驅(qū)動負(fù)載所需的力矩由摩擦力、慣性以及加速/減速時間決定。
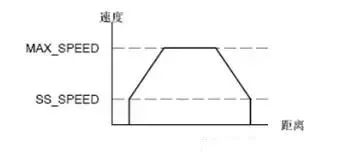
圖1 最大速度和啟動/停止速度示意
SS_SPEED:該數(shù)值應(yīng)滿足電機(jī)在低速時驅(qū)動負(fù)載的能力,如果SS_SPEED 的數(shù)值過 低,電機(jī)和負(fù)載在運(yùn)動的開始和結(jié)束時可能會搖擺或顫動。如果SS_SPEED 的數(shù)值過高,電機(jī)會在啟動時丟失脈沖,并且負(fù)載在試圖停止時會使電機(jī)超速。通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和減速時間
加速時間ACCEL_TIME:電機(jī)從 SS_SPEED速度加速到MAX_SPEED速度所需的時間。 減速時間DECEL_TIME:電機(jī)從MAX_SPEED速度減速到SS_SPEED速度所需要的時間。
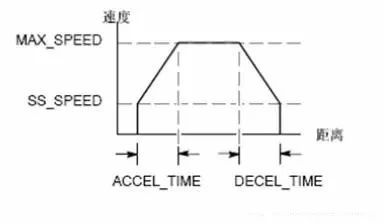
圖2 加速和減速時間
加速時間和減速時間的缺省設(shè)置都是1000 毫秒。通常,電機(jī)可在小于1000 毫秒的時間工作。參見圖2。這2 個值設(shè)定時要以毫秒為單位。
注意:電機(jī)的加速和失速時間要 過測試來確定。開始時,您應(yīng)輸入一個較大的值。逐漸減少這個時間值直至電機(jī)開始失速,從而優(yōu)化您應(yīng)用中的這些設(shè)置。
⑶移動包絡(luò)
一個包絡(luò)是一個預(yù)先定義的移動描述,它包括一個或多個速度,影響著從起點(diǎn)到終點(diǎn)的移動。一個包絡(luò)由多段組成,每段包含一個達(dá)到目標(biāo)速度的加速/減速過程和以目標(biāo)速度勻速運(yùn)行的一串固定數(shù)量的脈沖。 位控向?qū)峁┮苿影j(luò)定義界面,在這里,您可以為您的應(yīng)用程序定義每一個移動包絡(luò)。PTO 支持最大100 個包絡(luò)。
定義一個包絡(luò),包括如下幾點(diǎn):①選擇操作模式;②為包絡(luò)的各步定義指標(biāo)。③為包絡(luò)定義一個符號名。
⑴選擇包絡(luò)的操作模式:PTO 支持相對位置和單一速度的 續(xù)轉(zhuǎn)動,如圖3所示,相對位置模式指的是運(yùn)動的終點(diǎn)位置是從起點(diǎn)側(cè)開始計算的脈沖數(shù)量。單速續(xù)轉(zhuǎn)動則不需要提供終點(diǎn)位置,PTO 一直持續(xù)輸出脈沖,直至有其他命令發(fā)出,例如到達(dá)原點(diǎn)要求停發(fā)脈沖。
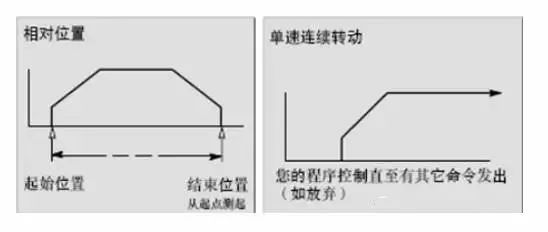
圖3 一個包絡(luò)的操作模式
⑵包絡(luò)中的步
一個步是工件運(yùn)動的一個固定距離,包括加速和減速時間 的距離。PTO 每一包絡(luò)最大允許29 個步。
每一步包括目標(biāo)速度和結(jié)束位置或脈沖數(shù)目等幾個指標(biāo)。圖4 所示為一步、兩步、三步和四步包絡(luò)。注意一步包絡(luò)只有一個常速段,兩步包絡(luò)有兩個常速段,依次類推。步的數(shù)目與包絡(luò)中常速段的數(shù)目一致。
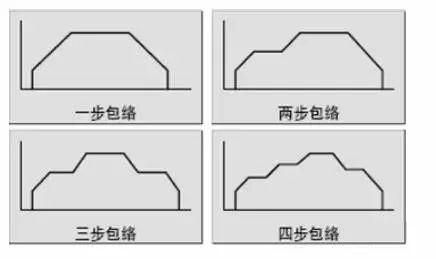
圖4 包絡(luò)的步數(shù)示意
7.2.5 使用位控向?qū)?a target="_blank">編程
STEP7 V4.0 軟件的位控向?qū)茏詣犹幚鞵TO 脈沖的單段管線和多段管線、脈寬調(diào)
制、SM 位置配置和創(chuàng)建包絡(luò)表。
本節(jié)將給出一個在YL-335A 上實(shí)現(xiàn)的簡單工作任務(wù)例子,闡述使用位控向?qū)Ь幊痰姆椒ê筒襟E。表1 是YL-335A 上實(shí)現(xiàn)步進(jìn)電機(jī)運(yùn)行所需的運(yùn)動包絡(luò)。
表1 步進(jìn)電機(jī)運(yùn)行的運(yùn)動包絡(luò)
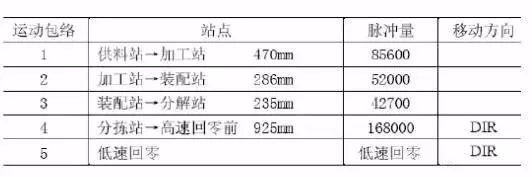
1、使用位控向?qū)Ь幊痰牟襟E如下:
1)為S7--200 PLC選擇選項(xiàng)組態(tài) 置PTO/PWM操作。
在STEP7 V4.0軟件命令菜單中選擇 工具→位置控制向?qū)Р⑦x擇配置S7-200PLC內(nèi)
置PTO/PWM操作,如圖5所示。
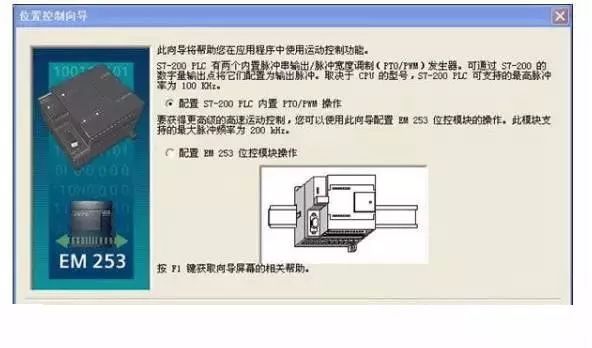
圖5 位控向?qū)咏缑?/p>
2)單擊“下一步”選擇“QO.0”,再單擊“下一步”選擇“線性脈沖輸出 PTO)”。
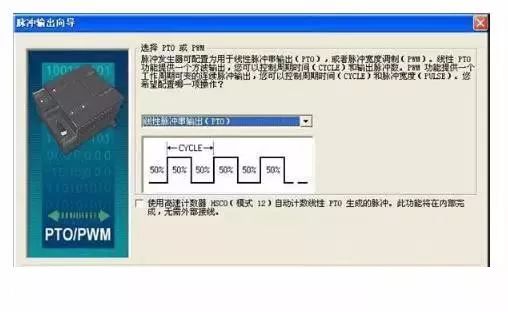
圖5 選擇PTO或PWM界面
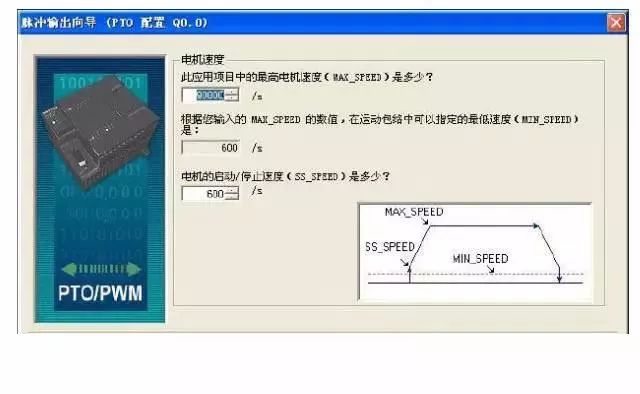
3)單擊“下一步”后,在對應(yīng)的編輯框中輸入MAX_SPEED 和SS_SPEED 速度值。輸入最高電機(jī)速度“90000”,把電機(jī)啟動/停止速度設(shè)定為“600”。這時,如果單擊MIN_SPEED值對應(yīng)的灰色框,可以發(fā)現(xiàn),MIN_SPEED值改為600,注意:MIN_SPEED值由計算得出。用戶不能在此域中輸入其他數(shù)值。
-
plc
+關(guān)注
關(guān)注
5016文章
13385瀏覽量
465352 -
西門子
+關(guān)注
關(guān)注
95文章
3062瀏覽量
116436 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
151文章
3120瀏覽量
147839 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2057瀏覽量
58188 -
S7-200
+關(guān)注
關(guān)注
13文章
408瀏覽量
50563
原文標(biāo)題:西門子S7-200PLC控制伺服和步進(jìn)電機(jī)所需的程序圖解
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
西門子S7-200PLC與西門子變頻器MM440通訊程序?qū)嵗?/a>

西門子S7-200PLC介紹

西門子S7-200 PLC應(yīng)用100例

西門子PLC應(yīng)用案例解析的詳細(xì)資料概述
西門子S7-200PLC多地址指針方案的實(shí)現(xiàn)方法
西門子S7-200和S7-300 PLC的CAD接線圖詳細(xì)資料免費(fèi)下載
基于西門子S71200 PLC的步進(jìn)電機(jī)控制

S7協(xié)議讀取西門子S7-200 Smart PLC數(shù)據(jù)

- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論