 深度剖析Apollo自動駕駛平臺,看看是不是有真的“原子彈”
深度剖析Apollo自動駕駛平臺,看看是不是有真的“原子彈”
陸奇去年在上海車展期間發布Apollo計劃,向所有合作伙伴免費開放無人駕駛能力,當時有文章評價這是百度扔下了原子彈,炸掉了無人駕駛企業數百億美元投入,今天讓我們深度剖析一下Apollo自動駕駛平臺,看看是不是有真的“原子彈”。
自百度宣布開放 Apollo 自動駕駛平臺以來,很多開發者非常期待可以深入了解 Apollo 平臺的開放內容,以便更充分高效的利用這個自動駕駛平臺,研究并落地自己對于自動駕駛的諸多想法。
為此,7 月 22 日,由百度開發者中心主辦、極客邦科技承辦的 73 期百度技術沙龍設置 Apollo 主題,現場百度資深架構師從 Apollo 的開放能力、Apollo 代碼開放框架以及基于深度學習的 End to End 自動駕駛方案三個技術維度做了深度分享,以期幫助開發者深度了解百度 Apollo 開放內容和平臺架構,設計并實現一套完整的駕駛方案。
Apollo 的開放能力和開放數據
百度資深數據平臺專家楊凡做了開場演講,他表示:“Apollo 開放內容實質上分為兩大部分:能力開放和資源開放,能力開放提供開發者實現車上自動駕駛的平臺,資源開放提供開發者探索算法進化的平臺,這二者相輔相成,缺一不可。”
Apollo 的開放能力
Apollo1.0 主要開放的是封閉場地循跡自動駕駛的框架,從上之下分別是服務層、軟件平臺層、參考硬件層以及參考汽車層,其中標藍部分為具體開放模塊。各層級的具體功能如下:
參考汽車層:實現電子化的控制,也就是線控汽車,這是最底層的一步;
參考硬件層:實現計算能力,包括計算單元、GPS/IMU、HMI Device 等;
軟件平臺層:最核心的層,分為 3 個部分。1、實時 RTOS 系統,要求保證實時反應;2、運行時框架;3、定位模塊和控制模塊以及 HMI 人機交互模塊。這三塊構成了本期開放的封閉場地循跡自動駕駛軟件體系;
云服務層:在云服務層開放了數據開放平臺和喚醒萬物的 DuerOS。

以上四層構成了百度 Apollo 自動駕駛平臺的整個技術棧。目前開放的 Apollo1.0 具有高效易拓展架構、立即可用硬件、一鍵啟動更新和完備的開發工具四大特性。
Apollo 的開放資源
Apollo1.0 在資源上開放了三個關鍵數據集:2D 紅綠燈、3D 障礙物以及 Road Hackers。百度將這三部分數據開放至云端,以便用戶高效研究運用。下圖為 Apollo 數據開放平臺的架構邏輯介紹。

如圖,用戶通過云端 Docker Repository,下載基于本地的 VM + Docker 的開發環境,編寫訓練和預測兩部分算法,配置依賴環境。通過云端用戶空間的可視化訓練調試平臺,將用戶在本機創建的算法容器,在云端實現調度,展開訓練評估調試。這樣用戶可以在整個云中的數據開放平臺中,基于海量數據利用集群的 CPU+GPU 資源訓練調試 model,并在其中選取有效的 model 使用。
現場,楊凡親自展示了 Apollo 平臺的使用流程和使用方法,本文不再此贅述,想要動手實踐的讀者可以移步至 Apollo 官網 apollo.auto,在“開發者”/“數據開放平臺”頁面有詳細的使用介紹。
Apollo 代碼開放框架
自動駕駛系統包括障礙物檢測、紅綠燈識別、駕駛行為決策、路徑規劃等系列復雜的功能模塊,如何將這些獨立而又相互依賴的模塊集成在一起,構建成一個穩定的運行系統,是一個巨大的挑戰。百度資深架構師何瑋從百度為何選用 ROS 系統、Apollo 中 ROS 的改進實踐、Apollo 框架使用介紹三個角度分享了 ROS 在百度自動駕駛的探索和實踐。
百度為何選用 ROS 系統?
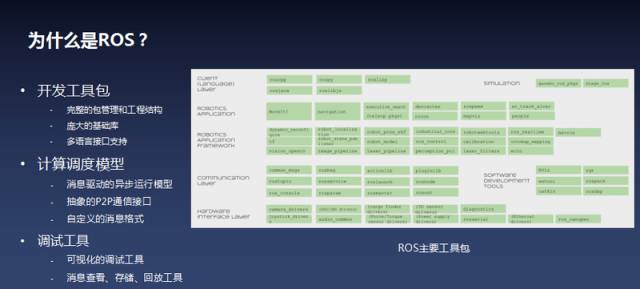
在百度為何選用 ROS 系統的問題上,何瑋給出解釋,ROS 是一個強大而靈活的機器人編程框架,同時也是學術界使用最廣泛的框架,它具有三大特性:完整的開發工具包、靈活的計算調度模型以及豐富的調試工具,能夠統一提供配置管理、部署運行、底層通信等功能,讓開發者將更多精力放在算法功能的研發上,快速構建系統原型,驗證算法和功能。
Apollo 中 ROS 的改進實踐
ROS 系統的優勢顯而易見,但其在 Apollo 平臺的應用中也并非一帆風順。百度在做研發調試到產品化的過程中,遇到的不少狀況,針對這些問題,百度從通信功能優化、去中心化網絡拓撲以及數據兼容性擴展三個方面做了定制化的改進。
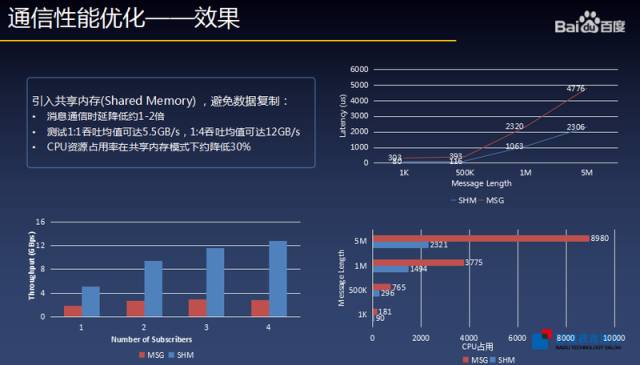
1、通信性能優化:共享內存
問題:自動駕駛系統為了能夠感知復雜的道路場景并完成駕駛任務,需要多種傳感器協同工作,以覆蓋不同場景、不同路況的需求。而主流的多傳感器融合方案至少會包含一個激光雷達和多個相機,如此大的數據量對通信的性能有很大的挑戰。
解決方案:百度采用的解決方案是共享內存,減少傳輸中的數據拷貝, 提升傳輸效率。
1 對 1 的傳輸場景下,同一個機器上的 ROS 節點之間是 socket 進行進程間通信,中間存在多層協議棧以及多次用戶空間和內核空間的數據拷貝,造成了很多不必要的資源占用和性能損耗。共享內存的方式來替代 socket 作為進程間通信的方式,通過減少不必要的內存拷貝,來降低了系統的傳輸延時和資源占用。
單對多的傳輸場景下,ROS 在處理一對多的消息傳輸時,底層實現實際是多個點對點的連接,當把一份數據要發給四個節點時,相同的數據會傳輸四次,這會造成很大的資源浪費。共享內存的傳輸過程,能夠支持一次寫入,多次讀取的功能,對于一對多的傳輸場景,相同的數據包只需要寫入一次即可,成倍地提高了傳輸的效率。
2、去中心化的網絡拓撲:使用 RTPS 服務發現協議
問題:ROS 并非完全的分布式框架,每個 ROS 網絡中需要有一個中心節點 ROS Master, 各個節點在初始化時會像 Master 注冊拓撲信息并獲取其他節點的信息。這種方式有兩個缺點:1、Master 作為系統的單點,一旦崩潰整個網絡將不可用;2、Master 缺乏異常恢復機制,崩潰后無法通過監控重啟等方式自動恢復。
解決方案:為了解決這個問題,百度在 ROS 在框架加入了基于 RTPS 協議的服務發現功能。
整個網絡拓撲不再以 master 為中心構建,而是通過域的概念進行劃分。當一個新的節點加入網絡時,會通過 RTPS 協議向域內的所有其他節點發送廣播信息,各個節點也會將自己的服務信息發送給新的節點,以代替 Master 的信息交換功能。
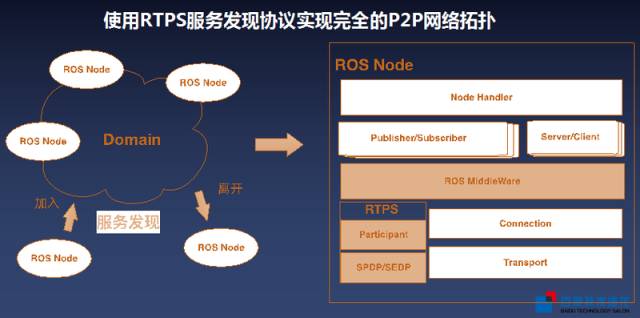
通過這種方式,能夠使 ROS 網絡的拓撲發現不再依賴 Master 單點,提高了系統的魯棒性。同時該修改完全基于 ROS 底層的修改,對上層應用程序完全透明,開發者也不需要對此功能有任何的代碼適配工作。
3、數據兼容性擴展:用 Protobuf 替換 Message
問題:ROS 系統為了保證收發雙方的消息格式一致,會對 message 定義做 MD5 校驗,任何字段的增減或順序調整都會使 MD5 變化,以保證系統的健壯性。然而這種嚴格的限制也引起了兼容性的問題,當接口升級后,不同的模塊之間不再能夠通信,大大增加了模塊版本之間的耦合。
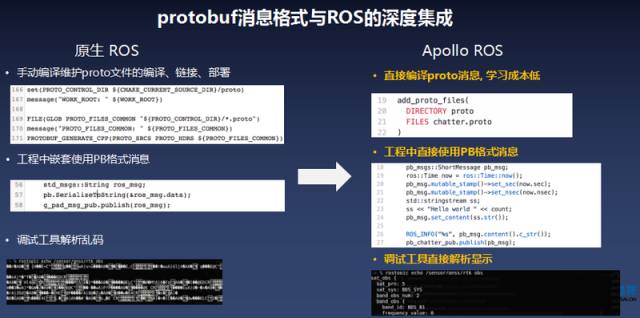
解決方案:使用 protobuf 來替換 ROS 中的 Message 來作為消息定義的格式。protobuf 本身有良好的兼容性支持,只需要在使用中定義好 required 字段,后續新增 optional 字段并不會對消息的解析造成影響。
Apollo 框架使用介紹
隨后,何瑋簡單介紹了 Apollo 框架的使用方法:
第一步:安裝 docher 系統。用 install-dacker 腳本安裝和部署 docker 環境,包含下載、代碼等一系列工作,安裝完之后需要注銷,并且用戶重新登陸,這其中需要注意的是因為涉及用戶權限的變更,需要當前用戶注銷之后才能完全生效;

第二步:編譯 Apollo。編譯代碼:bash Apollo.sh build;
第三步,啟動 Apollo。此步驟下需要對 Apollo 系統進行編譯,編譯完成之后啟動 Apollo。百度提供了一鍵啟動版本,可以將后臺的應用和前端顯示完整啟動。第一步:安裝 docher 系統。用 install-dacker 腳本安裝和部署 docker 環境,包含下載、代碼等一系列工作,安裝完之后需要注銷,并且用戶重新登陸,這其中需要注意的是因為涉及用戶權限的變更,需要當前用戶注銷之后才能完全生效;

目前 Apollo 開源代碼已上傳至 Github 網站,具體鏈接為:github.com/apolloauto,感興趣的碼農們可前往查閱相關的工具和文檔。
基于深度學習的 End to End 自動駕駛方案
開發者想要基于 Apollo 平臺設計一套完整的自動駕駛系統,前提需要了解百度的自動駕駛系統選擇和方案詳情,百度自動駕駛事業部資深架構師郁浩為大家分享了基于傳統 Rule Based 與 End to End 自動駕駛方案的異同與優劣,以及 Apollo 平臺在數據和模型上的實踐。
基于深度學習的方案選擇
郁浩表示,目前,業界和學術界主流還是 Rule based 系統。Rule based 從車輛、到傳感器感知、World model、然后進行決策、控制、最后到車輛,形成了比較完整的閉環系統。不過,其在實際的應用上還是有比較明顯的瓶頸:系統復雜(人工設計)、高精地圖成本高(需要廣鋪以及實時更新),計算性能(資源浪費)。而 End-to-End 方式能夠很好的解決這些問題。下圖為 Rule based 與 End-to-End 優劣對比。
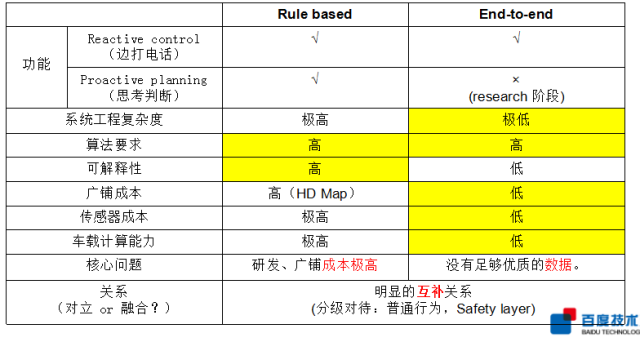
通過對比,可以看到 End-to-End 方案雖然解決了 Rule based 在應用上的部分缺點,但其在基本功能實現上需要進一步的探索和實踐。郁浩認為,這兩種方案,均有各自的優劣勢,在現階段,無法完全依靠某一種深度學習方案實現自動駕駛功能,Rule based 和 End-to-End 在未來的趨勢上必將是吸收對方的優點進行融合而絕非對立。
Apollo 實踐:數據
數據產生分一般兩類,一類是真實數據,一類是模擬器數據。目前,關于中國國情的真實數據非常稀少,模擬器數據雖然能在一定的能況下起借鑒作用,但大多通過游戲渲染出來的,其渲染的紋理與真實場景的紋理千差萬別,幾乎無法用到真實的道路上。
百度在這方面投入甚高,每年都會使用大量數據車實地采集幾百萬公里的數據進行分析。郁浩表示,本次開放的數據主要摘取了前向數據,包括 Image、RTK-GPS 以及 IMU 等,每一個開源的數據文件對應一次采集任務。這里比較有意思的是,百度沒有直接開源出精準坐標,而是根據坐標參數繁衍出1/R(拐彎半徑的倒數)和縱向指令。開發者可以里利用它與車廠合作,直接上路行駛。
Apollo 實踐:模型
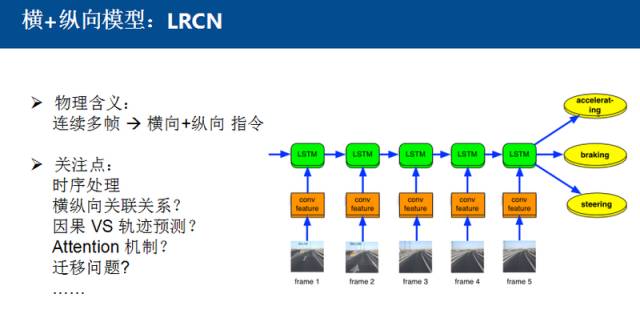
百度在去年的時候使用的是簡單的橫向模型 CNN 以及縱向控制模型 Convolutional-LSTM,今年,百度將這二者融合到一起,采用的橫向 + 縱向的模式:LRCN,該模型需要關注點時序處理、橫縱向關聯關系、因果 VS 軌跡預測、Attention 機制、遷移等問題,即能夠精準的預測出周圍的環境。
自動駕駛的模型構建還在探索階段。百度希望與開發者和合作伙伴一起,通過資源和能力的開放,開發出一套真正智能、完整、安全的自動駕駛解決方案。
-
自動駕駛
+關注
關注
785文章
13930瀏覽量
167006 -
Apollo
+關注
關注
5文章
343瀏覽量
18509
原文標題:深度剖析Apollo自動駕駛平臺
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
谷歌的自動駕駛汽車是醬紫實現的嗎?
自動駕駛真的會來嗎?
自動駕駛的到來
3天造出自動駕駛汽車的百度Apollo,背后竟有50多個后臺
AI/自動駕駛領域的巔峰會議—國際AI自動駕駛高峰論壇
自動駕駛集體爆發?看看2018CES那些大佬怎么說
自動駕駛平臺Apollo,是否帶動了行業變革?
Apollo開發套件加速自動駕駛研發
百度Apollo 5.5自動駕駛平臺發布,新增了什么功能呢
百度Apollo發布消息 自動駕駛開放平臺將迎來新的合作伙伴
研制光刻機難度,比研制原子彈難多了
百度通過Apollo平臺和Weltmeister EV展示了全自動駕駛
百度Apollo自動駕駛平臺及自動駕駛等級






 工商網監
工商網監
評論