") 從自主代客泊車解讀我來自動駕駛的發(fā)展
從自主代客泊車解讀我來自動駕駛的發(fā)展
“自主代客泊車”,簡單來說,就是在手機(jī)App上按下停車的命令,車輛就可以自動從下車區(qū)開到停車場里,并自己找到車位停好,當(dāng)車主需要的時(shí)候,再次從App上發(fā)出命令,車輛會自動回到上車區(qū)。整個(gè)過程沒有人的參與,是一個(gè)典型的限定范圍內(nèi)低速無人駕駛應(yīng)用場景。
前段時(shí)間谷歌開始在美國測試L4級無人駕駛車,英國最近也宣布什望能夠在2019年讓無人駕駛車開始上路,自動駕駛正在離人們的生活越來越近。但我們同時(shí)也知道,盡管L4級無人駕駛車開始上路,仍然是有限制條件的。要想用手機(jī)叫到一輛Waymo的無人駕駛網(wǎng)約車,等到項(xiàng)目正式啟動的時(shí)候也只有少數(shù)人才有這個(gè)條件。因而,要真正讓自動駕駛開始落地,選對場景很重要。
“自主代客泊車”,簡單來說,就是在手機(jī)App上按下停車的命令,車輛就可以自動從下車區(qū)開到停車場里,并自己找到車位停好,當(dāng)車主需要的時(shí)候,再次從App上發(fā)出命令,車輛會自動回到上車區(qū)。整個(gè)過程沒有人的參與,是一個(gè)典型的限定范圍內(nèi)低速無人駕駛應(yīng)用場景。限定范圍內(nèi)、低速這兩個(gè)條件一直被業(yè)內(nèi)認(rèn)為是最適合用來進(jìn)行自動駕駛商業(yè)化,符合這兩個(gè)條件的“自主代客泊車”可以么?
上海汽車城自去年開始規(guī)劃“自主代客泊車”項(xiàng)目,并與來自高校、企業(yè)共計(jì)6個(gè)團(tuán)隊(duì)希望在汽車·創(chuàng)新港中進(jìn)行“自主代客泊車”的示范運(yùn)營,從而論證這個(gè)問題。
自主代客泊車項(xiàng)目團(tuán)隊(duì)合影自主代客泊車項(xiàng)目團(tuán)隊(duì)合影
要實(shí)現(xiàn)“自主代客泊車”,都需要什么?
如果要對“自主代客泊車”進(jìn)行技術(shù)分解,可以簡單分為兩個(gè)部分:
1.通訊部分,要能夠在手機(jī)App、停車場云平臺和車輛之間進(jìn)行通訊,App要向云平臺發(fā)送停車和取車需求,停車場需要分配停車位給汽車;
2.執(zhí)行部分,車輛接收到分配的停車位信息之后,開啟自動駕駛模式,進(jìn)行路徑規(guī)劃到最終停到停車位上。
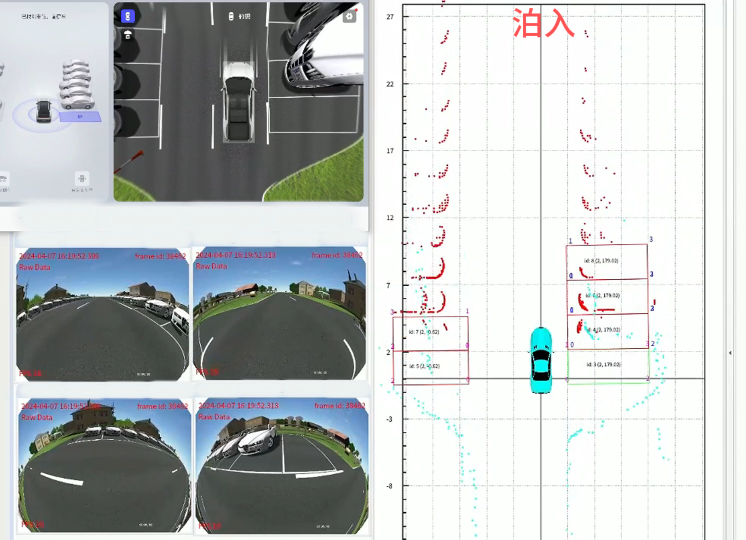
自主代客泊車演示
在上海汽車城規(guī)劃的這個(gè)“自主代客泊車”項(xiàng)目中,總共有六家團(tuán)隊(duì),來負(fù)責(zé)實(shí)現(xiàn)這兩個(gè)部分的不同內(nèi)容:
1.奇瑞新能源:提供基礎(chǔ)車輛奇瑞eQ1,并配合其他項(xiàng)目小組完成接口信號、協(xié)議等制定
在車輛方面,上海汽車城選擇了奇瑞新能源作為合作伙伴。因?yàn)橐獙?shí)現(xiàn)城市的“自主代客泊車”場景的商業(yè)化落地,從分時(shí)租賃車輛上先做運(yùn)營和示范,是一條可以探索的道路。上海汽車城與奇瑞新能源在今年年初通過多次溝通,雙方達(dá)成了合作的一致性。
根據(jù)奇瑞新能源項(xiàng)目經(jīng)理孫羽的介紹,奇瑞新能源在今年5月份正式加入到項(xiàng)目之中,提供的車型為eQ1電動車,在這段時(shí)間主要是配合其他團(tuán)隊(duì)對車輛進(jìn)行自動駕駛改制,包括汽車的線控零部件定制化開發(fā)、線控?zé)艄獾母脑欤浜稀白灾鞔筒窜嚒毕到y(tǒng)對車輛電源管理做策略調(diào)整等。
2.吉林大學(xué)汽車學(xué)院&上海逸驅(qū):自動泊車主控制器開發(fā)與車輛改裝布置
吉大汽車系的高振海教授表示,此次是以吉林大學(xué)汽車仿真與控制國家重點(diǎn)實(shí)驗(yàn)室為核心組建的團(tuán)隊(duì),自動泊車主控制器開發(fā)是團(tuán)隊(duì)的主要工作。自動泊車的主控制器可以理解為人的“小腦”,根據(jù)自動駕駛計(jì)算平臺做出的決策,取代駕駛員的手和腳去控制車輛的行駛方向、行駛速度和檔位等。
3.地平線:eQ1自動駕駛系統(tǒng)的開發(fā)
地平線在此次項(xiàng)目合作中負(fù)責(zé)整套eQ1自動駕駛系統(tǒng)的開發(fā)工作,包括感知、定位、決策、路徑規(guī)劃到車輛控制的過程,使得車輛能夠自動躲避障礙物,按照規(guī)劃的最優(yōu)路線自動開到停車場、精準(zhǔn)地停到指定的車位。
地平線項(xiàng)目經(jīng)理盧游告訴車云菌,車輛的改裝與調(diào)試已經(jīng)在十月底完成。采用的感知、決策算法地平線之前就在開發(fā),已有完整成熟的方案,此次針對"自主代客泊車"的場景和特殊要求進(jìn)行了調(diào)整,比如在地下通道中的定位是激光雷達(dá)與慣導(dǎo)的融合、因?yàn)榧友b了無線充電系統(tǒng)因而對于車輛的停車位置精度有較高的要求。
4.同濟(jì)大學(xué)交通運(yùn)輸工程學(xué)院:地面停車位與地下車庫的智能化改造
以往我們看到的智能汽車解決方案中,很少有針對交通基礎(chǔ)設(shè)施端的改造。同濟(jì)大學(xué)交通學(xué)院杜豫川教授團(tuán)隊(duì)的趙聰博士告訴我們,實(shí)現(xiàn)自動代客泊車場景不僅僅是車輛端的事情,同樣需要基礎(chǔ)設(shè)施端的配合。在未來“智能代客泊車”項(xiàng)目的商業(yè)化落地進(jìn)程中,基于智慧交通基礎(chǔ)設(shè)施的自動代客泊車解決方案可能比車端的系統(tǒng)升級更能受到市場的認(rèn)可。
這次改造主要包括“一中心四系統(tǒng)”:中心管控平臺、高精度定位系統(tǒng)、網(wǎng)聯(lián)通訊系統(tǒng)、車位感知與控制系統(tǒng)以及全流程的視頻監(jiān)視追蹤系統(tǒng)。其中高精度定位系統(tǒng)由一套安裝在路側(cè)的高精度定位設(shè)備實(shí)現(xiàn),來輔助車輛進(jìn)行定位和姿態(tài)識別,比如在坡道和視覺盲區(qū)等行駛工況復(fù)雜的位置同樣能實(shí)現(xiàn)很高的精度。據(jù)趙聰介紹,目前車輛和路側(cè)的定位系統(tǒng)之間已經(jīng)實(shí)現(xiàn)了數(shù)據(jù)互通,但是目前的算法中仍然以車端定位感知為主,后續(xù)計(jì)劃中會考慮更多依賴于路側(cè)基礎(chǔ)設(shè)施的定位感知。
目前項(xiàng)目在汽車?創(chuàng)新港內(nèi)完成了15個(gè)停車位的改造,包括地面的3個(gè)停車位、地下的12個(gè)停車位。不過趙聰表示,在停車運(yùn)營管理上的具體規(guī)則,包括在多車情境下車位分配和路徑規(guī)劃等,還在開發(fā)中,并沒有完全確定。這也是項(xiàng)目在二期中的重要內(nèi)容之一。
5.亦聯(lián):提供無線充電技術(shù)支持
亦聯(lián)是一家來自于加拿大的無線充電初創(chuàng)企業(yè),于今年年中入駐了汽車·創(chuàng)新港,在聽到園區(qū)負(fù)責(zé)人介紹說園區(qū)正在牽頭研發(fā)“自主代客泊車”項(xiàng)目之后,他們趕緊調(diào)集了人手,在一期中最后一個(gè)加入到“自主代客泊車”項(xiàng)目中。
相較于其他部分,無線充電部分的改裝相對簡單,亦聯(lián)的無線充電技術(shù)是通過磁動力耦合的方式,在60-400Hz頻率段中為電動交通工具實(shí)現(xiàn)大功率無線充電。
“自主代客泊車”的商業(yè)化場景
對于文章標(biāo)題所提出的問題,參與到項(xiàng)目中的團(tuán)隊(duì)給予的都是肯定的回答,不過各自的出發(fā)點(diǎn)略有不同。綜合來看,低速與限定區(qū)域在于能夠?qū)ψ詣玉{駛的實(shí)現(xiàn)難點(diǎn)給出針對性的解決方案。比如在停車場的園區(qū)內(nèi),不會存在過多的交通標(biāo)志,而在定位精度上的要求,也可以通過場端設(shè)備來輔助實(shí)現(xiàn)。甚至對于上面提到的障礙物和闖入物問題,也可以通過規(guī)定來實(shí)現(xiàn)全無人停車場。
從另外一個(gè)角度來說,選擇“自主代客泊車”來作為自動駕駛的首先落地場景,上海汽車城的想法是從解決實(shí)際的交通問題出發(fā),停車難是目前一二線城市中普遍存在的問題。這一點(diǎn)其實(shí)與車企在開發(fā)自動駕駛產(chǎn)品上的角度類似。所以擁堵路況和高速場景會是車企的首選量產(chǎn)場景。
項(xiàng)目的二期目標(biāo)是將其進(jìn)行產(chǎn)業(yè)化,雖然目前二期的整體方案尚未成熟,但是大致的改進(jìn)方向?qū)ǎ簲U(kuò)大參與的車輛數(shù)目,新增其他主機(jī)廠提供的車輛;加強(qiáng)云平臺的作用,希望可以通過云平臺來遙控車輛,這樣便于云端進(jìn)行統(tǒng)一地協(xié)調(diào)與調(diào)度,另外,也可以借助場端的感知與定位系統(tǒng),來輔助車輛進(jìn)行決策,但是這對于云平臺的計(jì)算能力以及通訊的時(shí)延、可靠性要求均較高,也是接下來需要進(jìn)行部署和測試的地方。
對于如何走向產(chǎn)業(yè)化,上海汽車城的項(xiàng)目負(fù)責(zé)人陸麗蓉也表示,現(xiàn)在還處于商討階段,現(xiàn)在大家討論的方向以兩個(gè)方向?yàn)橹鳎陧?xiàng)目二期開始后,也非常希望有更多技術(shù)方能參與到項(xiàng)目中來,共同推進(jìn)項(xiàng)目往商業(yè)化的方向前進(jìn)。
以汽車為主的解決方案,即要求汽車本身的技術(shù)能夠滿足各種要求。從車輛本身來看,要求有更強(qiáng)的感知與決策規(guī)劃能力,要能夠兼容不能環(huán)境的停車場,包括不具備云平臺和通訊能力的,車輛需要能夠自己找到空停車位。從用戶角度考慮,如果購買了自動泊車的能力,還必須到指定的停車場才能使用,是很難被接受的,性價(jià)比也會大打折扣。盧游也表示,盡管場端的改造是必須的,可以提高整個(gè)系統(tǒng)的運(yùn)行效率,但是從冗余和場端承載量來看,車輛必須自身具備更好的技術(shù)水平,不能完全依賴于場端。
以基礎(chǔ)設(shè)施為主,則是希望通過將核心技術(shù)放在場端來實(shí)現(xiàn),通過云端通訊的方式,來讓整個(gè)停車場內(nèi)的車輛實(shí)現(xiàn)自動尋找車位和泊車的功能。趙聰和逸驅(qū)的智能產(chǎn)品經(jīng)理郝眾望都認(rèn)為,這樣的方式,可以盡可能降低部署成本,而且停車本身就是針對停車場整個(gè)環(huán)境的管理過程,在路徑規(guī)劃和車輛運(yùn)行中,場端也可以在車位分配過程中,就減少不同車輛在路徑上的沖突。通過云端考慮全局狀態(tài)對車輛進(jìn)行控制,進(jìn)而實(shí)現(xiàn)高效的停車,是這一派認(rèn)為最終會達(dá)到的理想狀態(tài)。
這兩條路線各有側(cè)重,從實(shí)現(xiàn)方式來看,依賴于場端改造可以允許車輛上加強(qiáng)高成本的自動駕駛系統(tǒng),但是從另外一個(gè)角度看,無線充電的加裝就成了必須。從用戶來說,只能到特定的停車場才可能用到這個(gè)功能,車企在進(jìn)行車型的功能設(shè)計(jì)時(shí),需要考慮到這個(gè)情況。
從當(dāng)前的狀態(tài)來看,“自主代客泊車”距離真正的大規(guī)模產(chǎn)業(yè)化時(shí)間還長,整體技術(shù)方案、標(biāo)準(zhǔn)和成本的綜合考慮仍待實(shí)現(xiàn)。但從另外一個(gè)角度上,“自主代客泊車”可以結(jié)合共享租車開始小規(guī)模落地,或許相比于無人駕駛網(wǎng)約車,能夠更快與消費(fèi)者見面。
-
自動駕駛
+關(guān)注
關(guān)注
785文章
13930瀏覽量
167007
發(fā)布評論請先 登錄
相關(guān)推薦
云天勵(lì)飛助力深圳自主泊車代駕新突破
華為乾崑智駕泊車代駕VPD全球首個(gè)機(jī)場商用試點(diǎn)發(fā)布
光庭信息自動駕駛系統(tǒng)亮相CES 2025
從《自動駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動駕駛中的重要性

Arbe誠邀您共赴CES 2025,探索未來自動駕駛
自動駕駛中常提的SLAM到底是個(gè)啥?


自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL
淺談自動駕駛技術(shù)的現(xiàn)狀及發(fā)展趨勢
自動駕駛技術(shù)的典型應(yīng)用 自動駕駛技術(shù)涉及到哪些技術(shù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論