 Firmware V4.1 的S7-1200 CPU來說運動控制方式有了更多的選擇
Firmware V4.1 的S7-1200 CPU來說運動控制方式有了更多的選擇
S7-1200 運動控制
到目前為止S7-1200 CPU最新的Firmware版本為V4.1,對于Firmware V4.1 的S7-1200 CPU來說運動控制方式有了更多的選擇。
S7-1200運動控制根據連接驅動方式不同,分成三種控制方式:
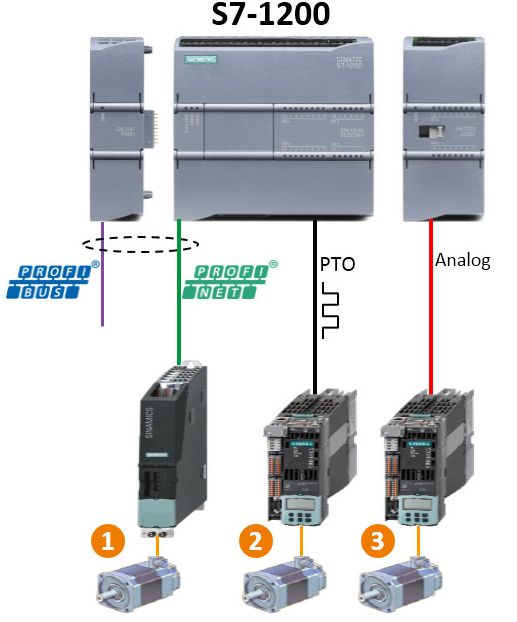
PROFIdrive:S7-1200 PLC通過基于PROFIBUS/PROFINET的PROFIdrive方式與支持PROFIdrive的驅動器連接,進行運動控制。
PTO:S7-1200 PLC通過發送PTO脈沖的方式控制驅動器,可以是脈沖+方向、A/B正交、也可以是正/反脈沖的方式。
模擬量:S7-1200 PLC通過輸出模擬量來控制驅動器。
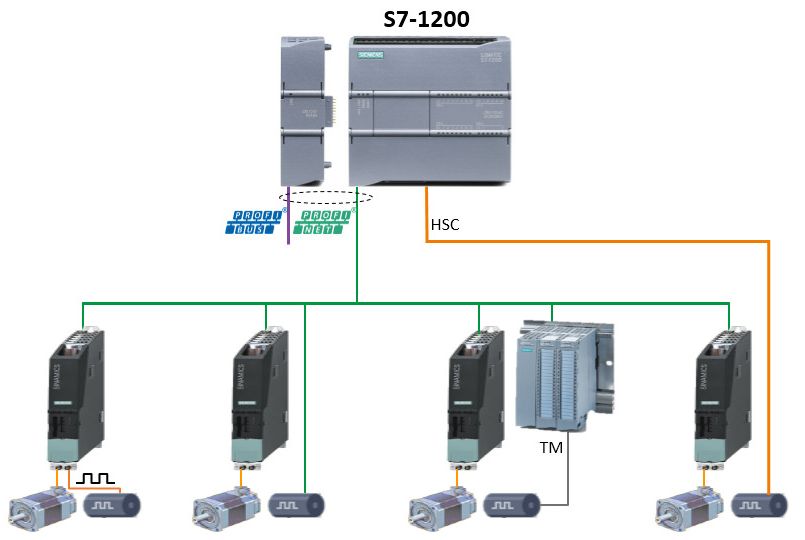
一、S7-1200運動控制--PROFIdrive控制方式
Firmware V4.1的S7-1200 CPU PROFIdrive 是通過 PROFIBUS DP 和 PROFINET IO 連接驅動裝置和編碼器的標準化驅動技術配置文件。支持 PROFIdrive 配置文件的驅動裝置都可根據 PROFIdrive 標準進行連接。控制器和驅動裝置/編碼器之間通過各種 PROFIdrive 消息幀進行通信。
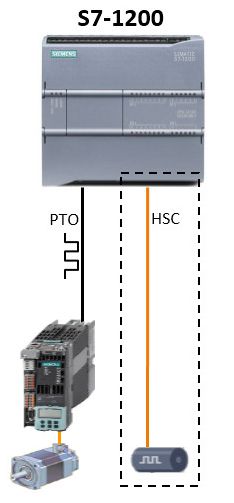
二、S7-1200運動控制--PTO控制方式
PTO的控制方式是目前為止所有版本的S7-1200 CPU都有的控制方式,該控制方式由CPU向軸驅動器發送高速脈沖信號(以及方向信號)來控制軸的運行。
這種控制方式是開環控制,但是用戶可以選擇增加編碼器,利用S7-1200 高速計數功能(HSC)來采集編碼器信號得到軸的實際速度或是位置實現閉環控制。
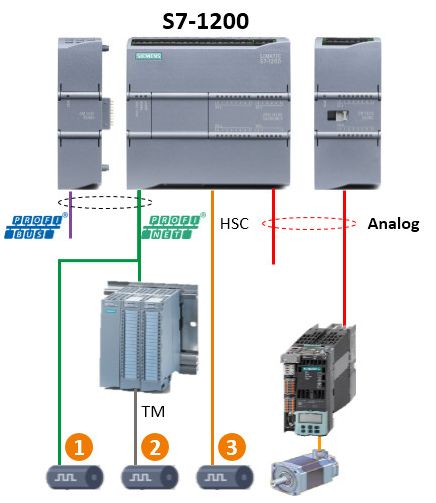
三、S7-1200 運動控制--模擬量控制方式
Firmware V4.1版本的 S7-1200 PLC的另外一種運動控制方式是模擬量控制方式。以CPU1215C為例,本機集成了2個AO點,如果用戶只需要1或2軸的控制,則不需要擴展模擬量模塊。然而,CPU1214C這樣的CPU,本機沒有集成AO點,如果用戶想采用模擬量控制方式,則需要擴展模擬量模塊。
模擬量控制方式也是一種閉環控制方式,編碼器信號有3種方式反饋到S7-1200 CPU中。
-
cpu
+關注
關注
68文章
10904瀏覽量
213027 -
S7-1200
+關注
關注
11文章
331瀏覽量
18073
原文標題:S7-1200 運動控制
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

基于S7-1200的運動控制功能介紹

WinCC V7.2與S7-1200的PLC通訊


基于S7-1200PLC運動控制編程及調試

S7-1200連接V90實現位置閉環控制設計


西門子S7-1200與V80伺服進行運動控制實例

S7-1200和S7-1200進行S7通信的詳細資料說明

關于S7-1200和S7-1200之間UDP的通信與仿真

西門子S7-1200運動控制指令的使用
S7-1200能仿真通信嗎?

S7-1200 CPU與S7-200 SMART S7通信指南
S7-1200與S7-300的選型區別






 工商網監
工商網監
評論