 單車智能經歷了哪些發展路徑?
單車智能經歷了哪些發展路徑?
自動駕駛技術的發展可以分為單車智能和車路協同兩種主要技術路徑。單車智能強調車輛完全依靠自身的感知、計算和決策能力,實現獨立駕駛,而不依賴外部基礎設施提供額外信息支持。這種架構的核心目標是讓自動駕駛系統具備在無論是高速公路、城市街道,還是鄉村道路等各種復雜道路環境下的自主行駛能力,車輛能夠依靠自身傳感器感知環境,并自主完成路徑規劃和控制指令。車路協同則依賴于高精度地圖、V2X通信等外部信息的輔助,以優化決策過程,提高駕駛安全性。考慮到現實世界中基礎設施建設的不均衡性,以及不同地區道路環境的復雜性,單車智能依然是當前自動駕駛落地的核心技術方向。
隨著人工智能和計算硬件的快速發展,單車智能的架構也在不斷進化,逐步從傳統的模塊化架構向端到端架構轉變。傳統的模塊化架構將自動駕駛任務拆分為多個子模塊,包括感知、定位、規劃、決策和控制等,每個模塊獨立運行并相互協作。這種架構雖然成熟且易于調試,但在模塊間傳遞數據時會造成信息損失,同時誤差的累積會影響整體系統的性能。端到端架構的出現,改變了這一方案,通過深度學習的方法,用神經網絡直接將傳感器數據映射到最終的駕駛決策,實現從感知到控制的一體化學習。這種方式減少了中間環節,理論上能夠提高系統的決策效率和魯棒性,使車輛在復雜場景下具備更好的適應能力。因此,端到端技術正逐步成為單車智能發展的重要方向,并在自動駕駛行業內引發了廣泛關注。
傳統單車智能架構
在傳統的模塊化單車智能架構中,自動駕駛系統通常由多個獨立的功能模塊組成,每個模塊專注于特定任務,并通過標準化接口進行數據交互。環境感知模塊依靠攝像頭、激光雷達、毫米波雷達、超聲波雷達等多種傳感器來獲取道路環境信息。感知算法基于深度學習模型,如目標檢測算法(YOLO、Faster R-CNN)、語義分割算法(DeepLab、Mask R-CNN)、目標跟蹤算法(SORT、DeepSORT)等,用于識別周圍的車輛、行人、交通信號和障礙物。結合點云數據處理算法(如VoxelNet、PointPillars),還可以實現高精度的3D目標檢測,以提高感知系統的準確性。
在獲得環境信息后,定位模塊負責確定車輛的精準位置。單車智能一般采用多傳感器融合的方式,通過GPS/RTK提供初始位置信息,并結合慣性測量單元(IMU)進行短時精準校正。基于視覺SLAM(V-SLAM)或激光SLAM(L-SLAM)技術,還可以在無GPS信號的環境中(如隧道、地下停車場)維持較高精度的定位。一些高級自動駕駛系統還會利用閉環優化方法(如圖優化、粒子濾波、擴展卡爾曼濾波等)進一步提高定位精度,確保車輛能夠在復雜環境下穩定運行。路徑規劃和行為決策是單車智能的重要組成部分,它決定了車輛的行駛軌跡和駕駛策略。全局路徑規劃通常基于如A*、Dijkstra算法等傳統的搜索算法,而局部路徑優化則采用貝塞爾曲線、B樣條曲線或梯度優化方法,使軌跡更加平滑、可行。在決策層面,有限狀態機(FSM)用于處理規則驅動的任務,而強化學習(如DQN、PPO)則用于學習更加靈活的駕駛策略。最終,車輛控制模塊通過PID控制、模型預測控制(MPC)或線性二次調節器(LQR)等方法,實現精確的轉向、加速和制動控制,使車輛能夠按照規劃路徑安全行駛。
端到端架構的興起
隨著深度學習技術的成熟,端到端架構正在成為單車智能的新趨勢。與傳統模塊化架構不同,端到端方法試圖通過單一的深度神經網絡直接從原始傳感器數據推導出最終的駕駛決策。早期的端到端方法主要基于卷積神經網絡(CNN),如NVIDIA的PilotNet,它通過攝像頭圖像輸入,直接預測車輛的轉向角。這種方法雖然在封閉場景中表現良好,但由于缺乏對復雜交通環境的建模能力,難以推廣至開放道路場景。為了提升端到端架構的能力,近年來研究人員引入了更加先進的深度學習模型,如基于Transformer的自注意力機制。相比于傳統CNN,Transformer可以捕捉更長時序范圍的特征,提高對復雜場景的理解能力。例如,Waymo和Tesla均采用Transformer-based Planner來預測車輛的軌跡,并生成合理的行駛路徑。此外,端到端架構還結合了強化學習和模仿學習的方法,如Deep Q-Network(DQN)、A3C、PPO等,使車輛能夠在模擬環境中自主學習駕駛策略,并逐步適應不同的駕駛場景。目前,端到端架構主要分為感知-控制端到端和感知-規劃端到端兩種方式。感知-控制端到端方法直接從傳感器輸入生成控制指令,適用于低速場景或結構化道路,而感知-規劃端到端方法則將深度學習與傳統路徑規劃相結合,使系統既具備端到端學習能力,又保留了一定的可解釋性,適用于城市NOA等更復雜的自動駕駛任務。
端到端架構的挑戰與發展趨勢
盡管端到端架構在提升自動駕駛系統效率和靈活性方面具有巨大潛力,但它仍然面臨諸多挑戰。其中最主要的問題是可解釋性差,傳統模塊化架構可以清楚地分析感知、規劃、決策各個環節的錯誤來源,而端到端方法由于神經網絡的黑盒特性,難以追蹤其決策過程。這使得端到端架構在安全認證和法規監管方面存在一定的難度。端到端方法對數據的依賴性也較強,需要大量真實世界的駕駛數據進行訓練,而數據標注成本高,且在長尾場景(如極端天氣、緊急避險)中的泛化能力仍待提升。
為了克服這些挑戰,當前的研究方向逐漸向“端到端+模塊化融合”的模式發展,即在端到端架構的基礎上,引入部分模塊化設計,以增強系統的可靠性和可控性。如感知模塊仍然采用傳統的深度學習目標檢測方法,而規劃和控制部分則通過端到端神經網絡進行優化。這種混合架構既能夠充分利用端到端方法的學習能力,又能夠保留模塊化架構的穩定性和可解釋性,使單車智能能夠更快地走向商業化落地。
結論
單車智能作為自動駕駛的核心發展方向,正在經歷從傳統模塊化架構向端到端架構的演進。端到端方法憑借深度學習的強大能力,極大地提升了自動駕駛系統的效率和泛化能力,但同時也面臨可解釋性、數據需求和長尾場景適應性等挑戰。未來,隨著計算硬件的提升和算法的不斷優化,端到端架構有望與模塊化方法相結合,推動單車智能技術邁向更高層次的自動駕駛水平。
審核編輯 黃宇
-
算法
+關注
關注
23文章
4630瀏覽量
93344 -
自動駕駛
+關注
關注
785文章
13929瀏覽量
167000 -
深度學習
+關注
關注
73文章
5513瀏覽量
121539
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
openKylin社區匯力融合謀發展
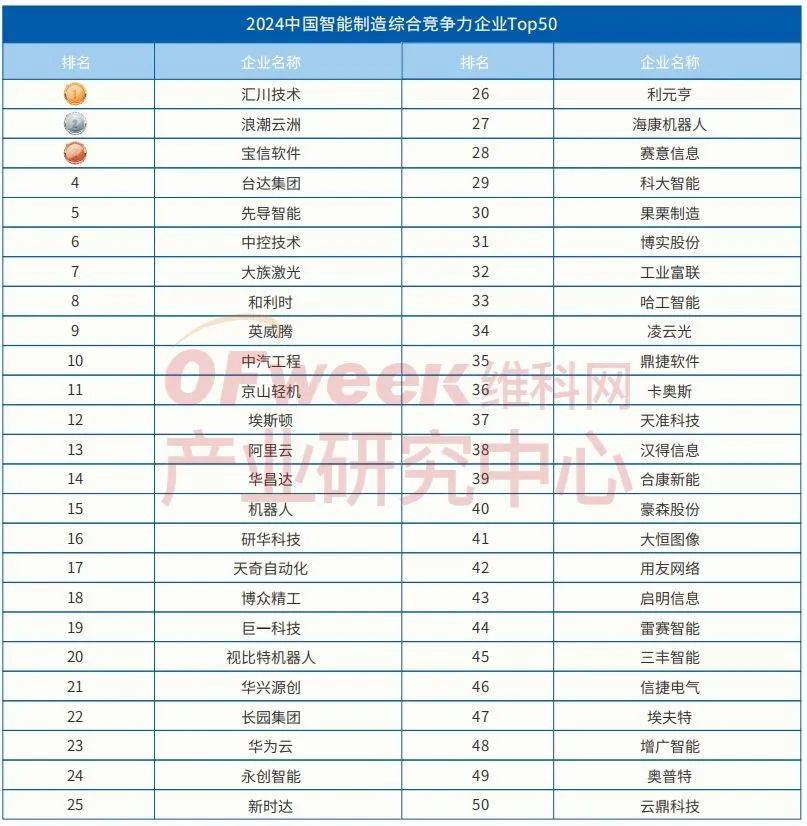
2024智能制造產業高端化、智能化、綠色化發展藍皮書
華為智能駕駛發展路徑探討

自動駕駛的未來之路:智能網聯與單車智能的交融
藍牙模塊是如何應用到共享單車上?
為智能共享單車鎖系統選擇正確的參考晶振

行業觀察|加速內卷的智能門鎖,如何走出發展新路徑?綠展科技提出高性能及高性價比指紋模組解決方案

工業控制系統的發展大致經歷了哪些階段
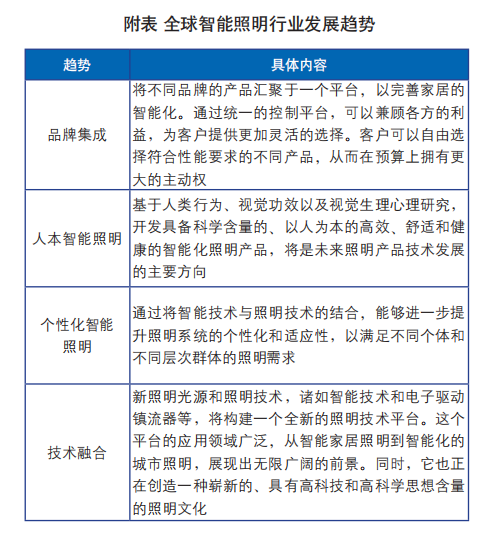
淺談智能照明產業的發展與研究
浪潮信息IPF24: 發展人工智能+,創新需要激發活力、拓展路徑、加速落地
共享單車到底是什么通信原理

共享單車智能鎖方案設計【硬件拆解】

淺談共享單車中的通信原理






 工商網監
工商網監
評論