 自主自研運動控制集成開發平臺RTSys(一):快速入門
自主自研運動控制集成開發平臺RTSys(一):快速入門

機器視覺運動控制開發軟件RTSys
RTSys是正運動推出的純國產自主工業軟件IDE開發環境,集成運動控制+機器視覺功能的開發軟件,支持RTBasic、RTPlc梯形圖、RTHmi、C語言、RTVision機器視覺等二次開發,可混合編程、實時仿真、在線跟蹤以及診斷與調試,快速實現智能裝備的視覺定位、測量、識別、檢測和復雜的運動控制等系統的開發。
更多關于RTSys開發平臺詳情點擊→RTSys:自主自研、簡單易用的運動控制集成開發平臺(上)、RTSys:自主自研、簡單易用的運動控制集成開發平臺(下)。
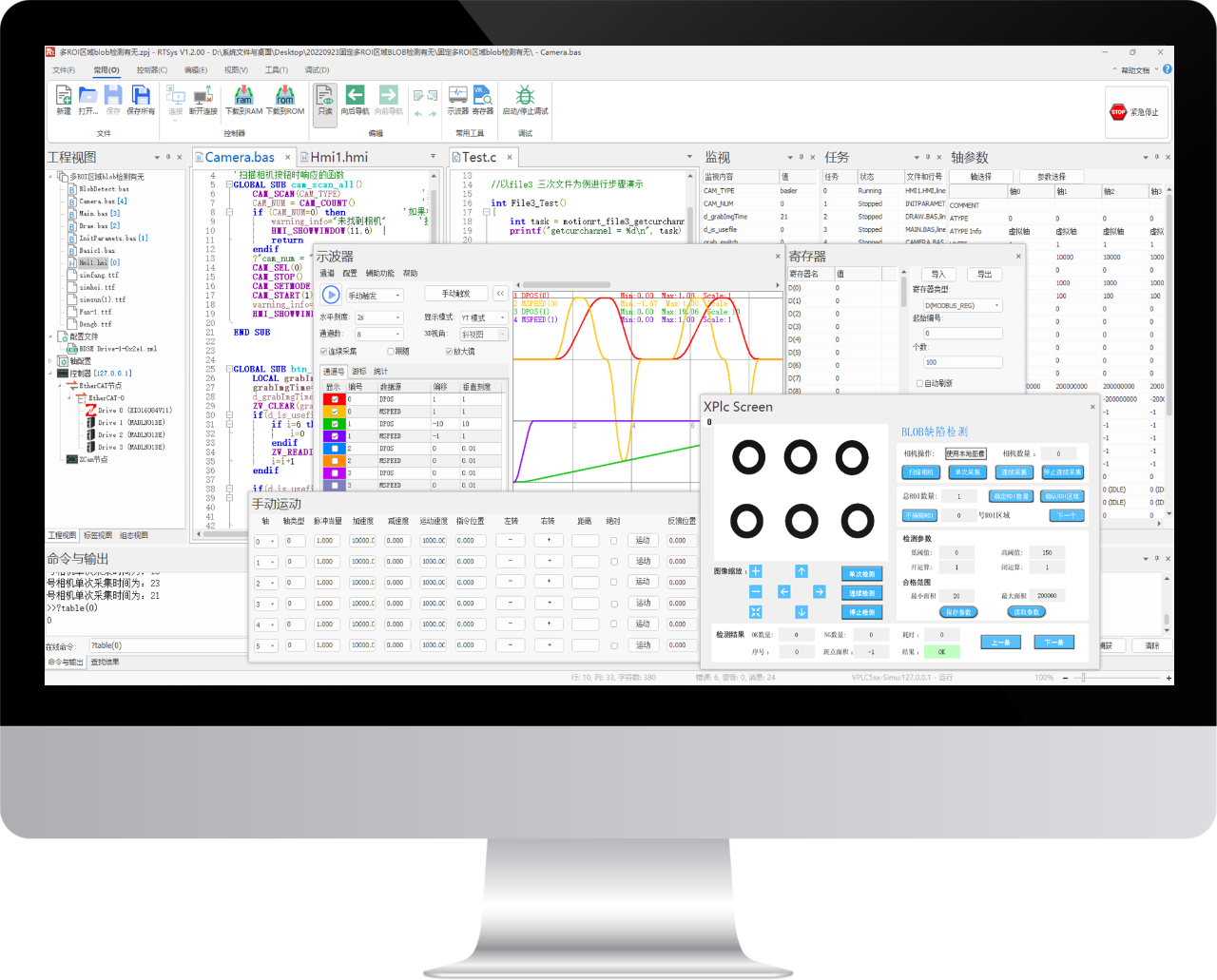
RTSys軟件除了基礎的編程使用,還支持搭載多種調試工具/窗口,例如:示波器、手動運動、輸入/輸出、軸參數窗口、調試與監視、xplc screen組態仿真等。
RTSysV1.2.02版本新增了EtherCAT配置、CAN擴展配置、軸配置、PWM工具、SDO工具等功能,以及示波器功能升級、HMI控件新增等,便于用戶在軟件中實現一站式開發,簡化用戶的操作步驟,提高用戶的可操作性。RTSys軟件開發界面及各工具窗口如下圖所示。
ZMC432M系列產品介紹
ZMC432M系列多軸運動控制器是一款EtherCAT總線立式模塊化運動控制器。憑借著超強的運動控制性能,能流暢地完成點位運動、電子凸輪、直線運動、圓弧插補、連續軌跡加工、激光 PWM 和機械手等控制任務。同時,為更好地貼合客戶需求,該控制器特別新增了后級擴展接口,使客戶能夠迅速進行資源擴展。
ZMC432M系列多軸運動控制器內置補償算法,其EtherCAT最小通訊周期可達250us,為用戶帶來高效穩定的控制體驗。
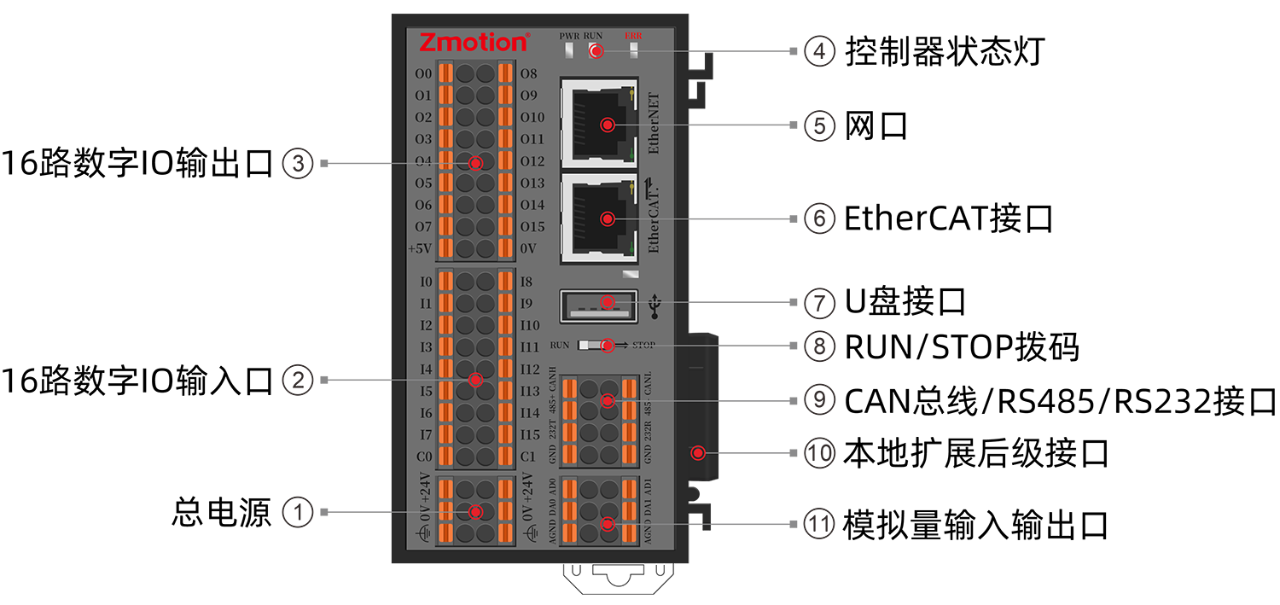
ZMC432M功能特性:
1.支持8-32軸運動控制,EtherCAT最小通訊周期125us;
2.板載RS232、RS485、CAN、EtherNet、EtherCAT、UDISK硬件接口;
3.板載16DI接口,其中4個高速色標鎖存、4組單端編碼器。輸入口最多可擴展至4096路;
4.板載16DO接口,其中8個高速單端脈沖軸、4組高速PWM、4組高速硬件比較輸出HW。輸出口最多可擴展至4096路;
5.板載2路AD和2路DA、1個RUN/STOP撥碼。
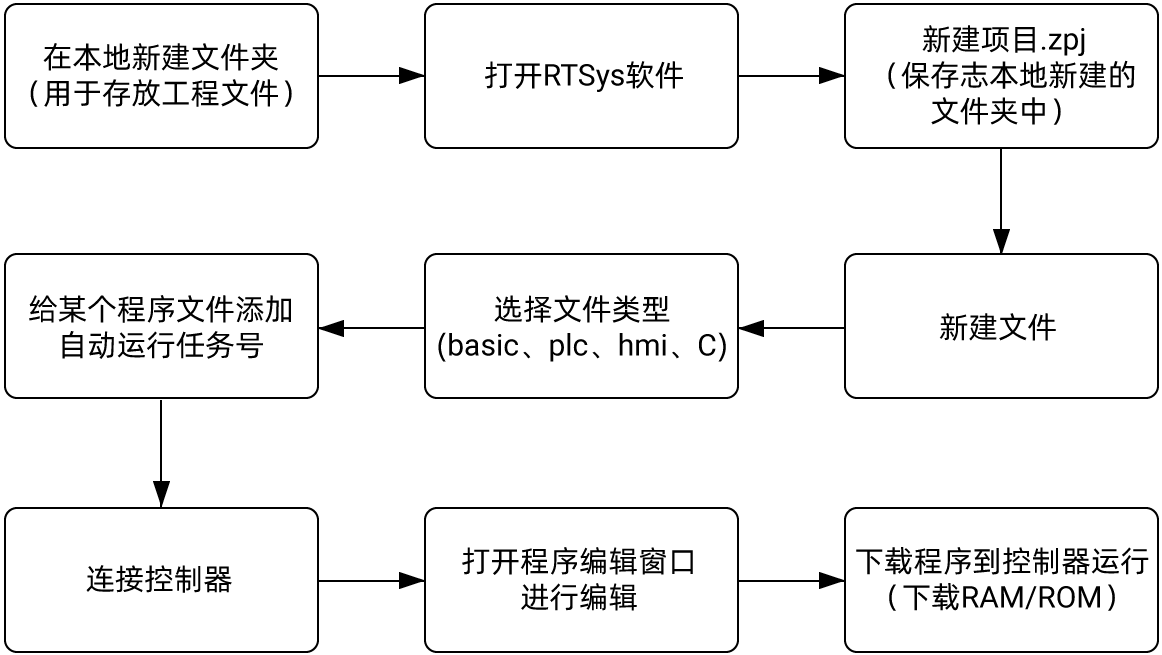
01 RTSys編程開發操作流程
首先,需要在電腦里新建一個文件夾用來保存即將要建立的工程。打開RTSys編程軟件,本文例程RTSys軟件版本為V1.2.02,更新軟件版本請前往正運動官方網站下載,網址:www.zmotion.com.cn。(省流版流程圖見詳細步驟之后)
??? 新建項目
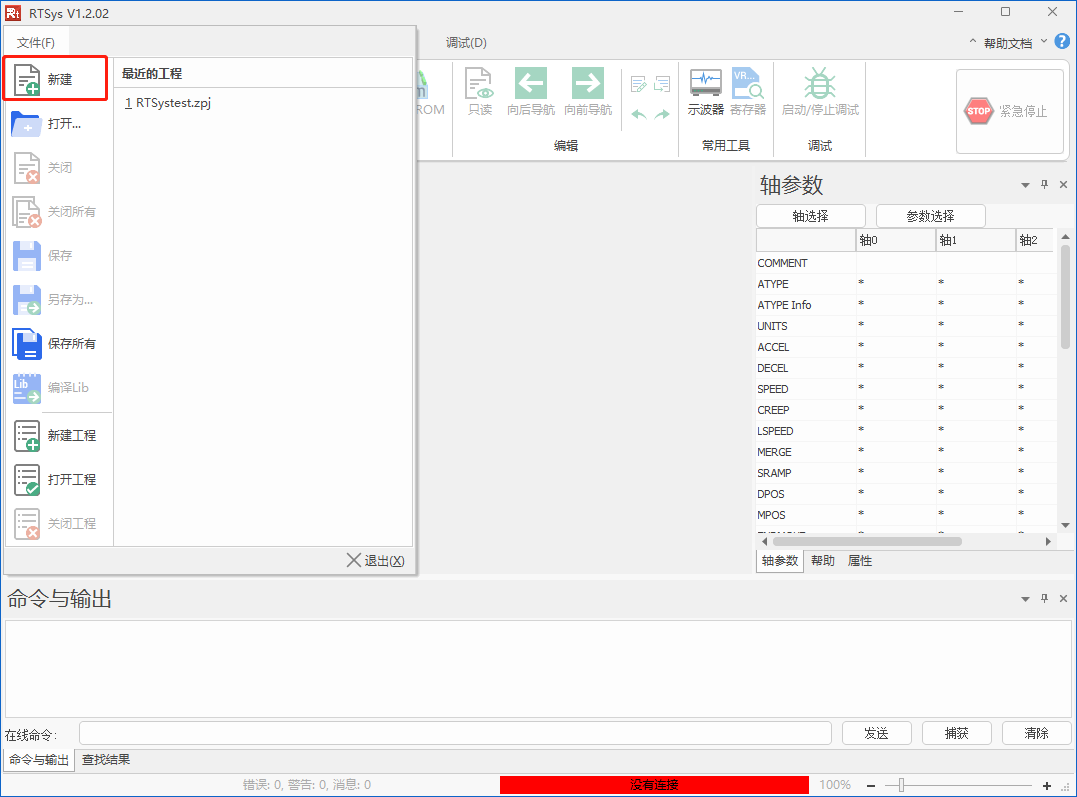
新建項目:菜單欄“文件”→“新建工程”。
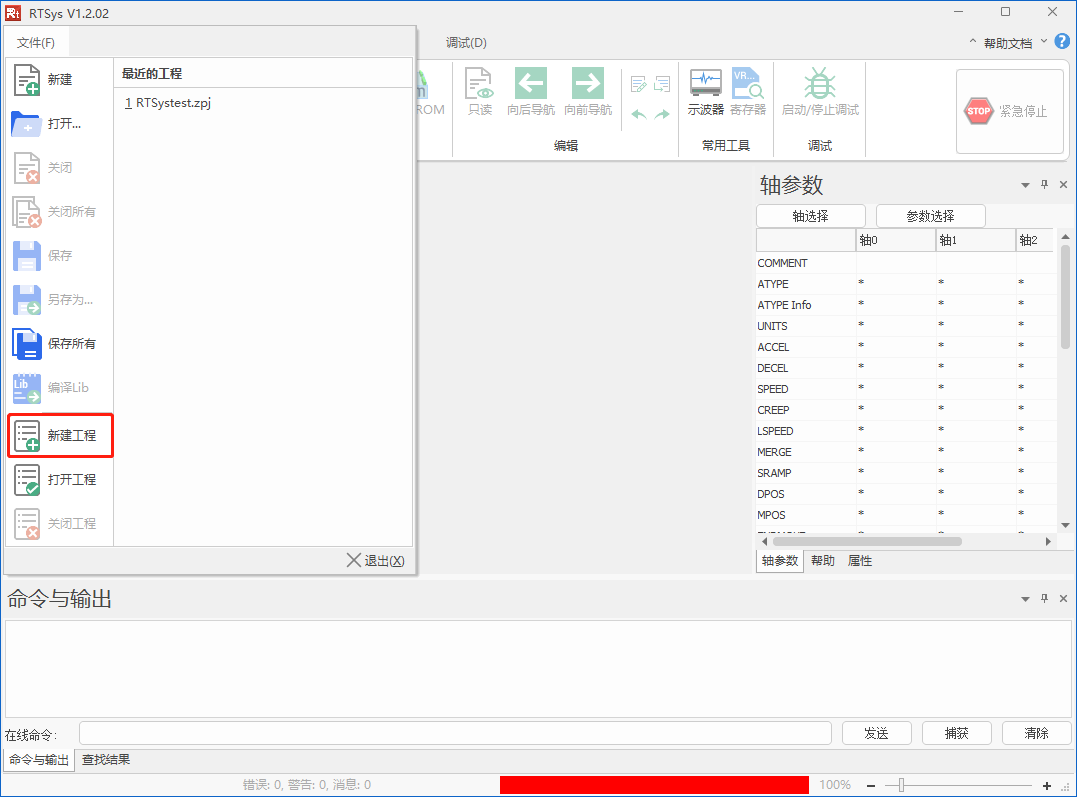
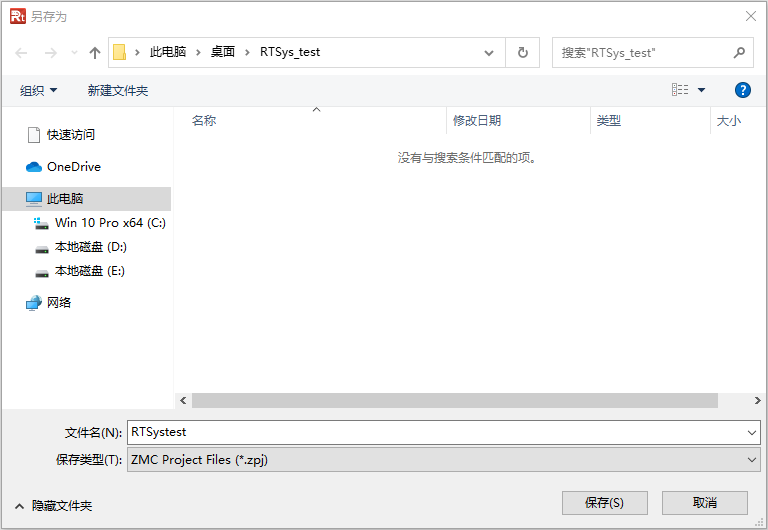
點擊“新建工程”后彈出“另存為”界面,選擇開頭已建好的文件夾并打開,輸入項目名后保存項目,后綴為“.zpj”。
??? 新建程序文件
新建文件:菜單欄“文件”→“新建”或菜單欄“常用”→“新建”。
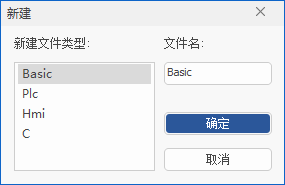
點擊“新建文件”后,出現下圖所示的彈窗,支持Basic/PLC/Hmi/C混合編程,這里選擇新建的文件類型為Basic后確認(支持修改文件名)。
??? 設置自動運行任務號
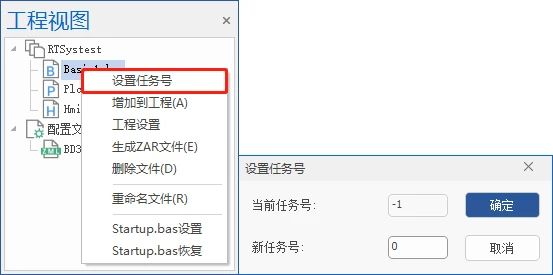
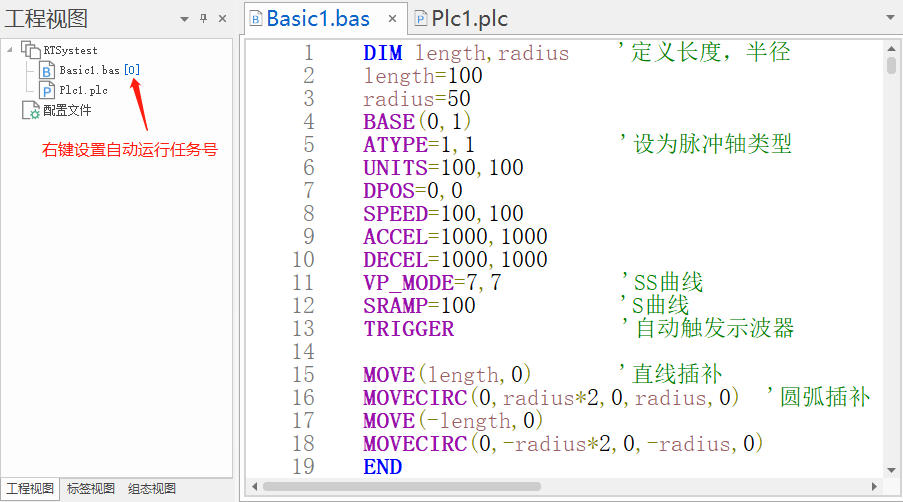
設置文件自動運行:如下左圖,右鍵單擊文件,選擇“設置任務號”,彈出如下右圖窗口,輸入新任務號“0”,點擊確定即可設置成功。
設置成功后在該文件名右側顯示任務號,如:Basic1.bas[0]。
注:支持設置多個文件的任務號,至少要有一個文件設置任務號,否則無法運行程序!設置了任務號的文件會自動同時運行,任務號數值不分優先級。
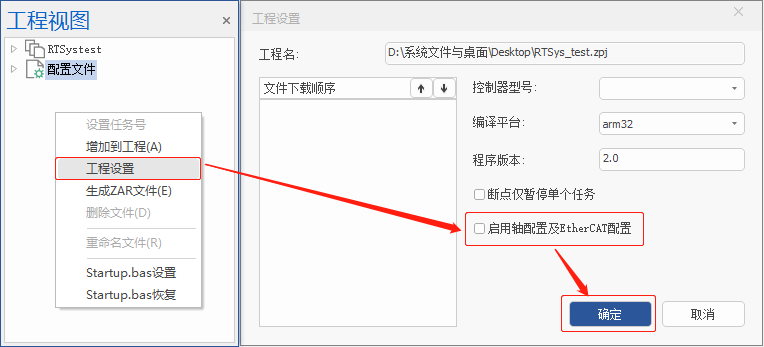
??? 選擇是否開啟“軸配置和EtherCAT配置”功能
若需要使用“軸配置和EtherCAT配置”功能,則需要單獨開啟。通過右鍵單擊RTSys“工程視圖”空白處→選擇“工程設置”→勾選“啟用軸配置及EtherCAT配置”→點擊“確定”。
???程序編輯或連接控制器/仿真器
編輯程序:程序編寫完成,點擊保存文件,新建的Basic文件會自動保存到項目.zpj所在的文件下。
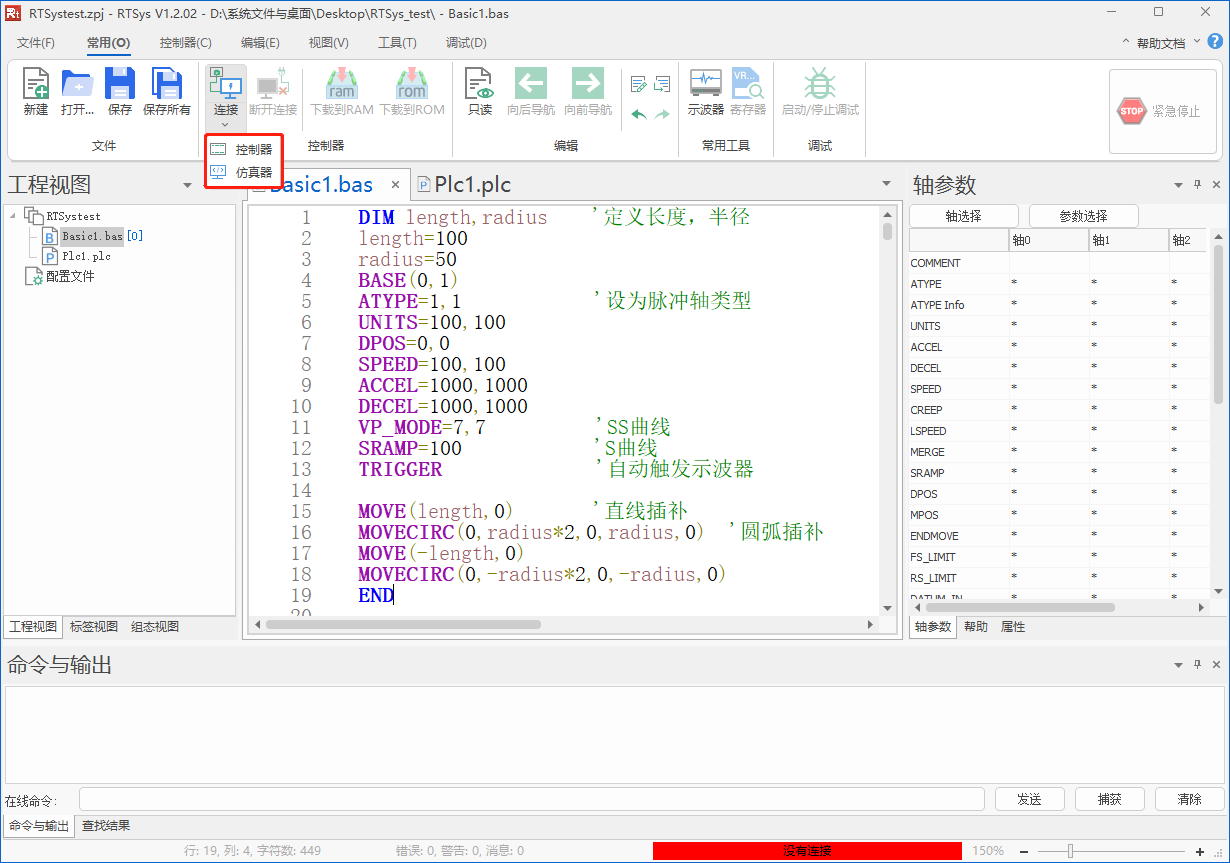
連接到控制器:在程序輸入窗口編輯好程序,點擊“常用/控制器”→“連接” →“控制器”。
注:若無控制器使用,可使用RTSys自帶的仿真器進行連接運行。點擊“連接”→“仿真器”,便可連接到仿真器,并彈出仿真器連接成功提示。(彈出的仿真器窗口不可關閉,關閉即斷開連接)
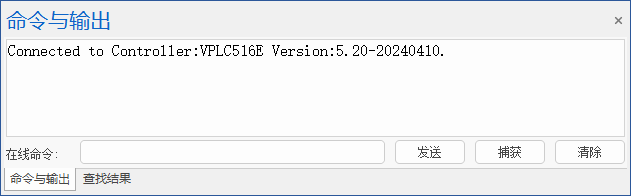
點擊“連接”→“控制器”,彈出“連接到控制器”窗口,可選擇串口連接或網口連接,選擇匹配的串口參數或網口IP地址(出廠默認IP地址:192.168.0.11)后,點擊連接即可。連接成功則[命令與輸出]窗口打印信息:Connected to Controller:VPLC516E Version:4.99-20190219(型號和版本跟隨控制器變化)。
串口連接和網口連接的詳細方法參見下文“連接控制器”。
???下載程序到控制器
下載程序:點擊菜單欄按鈕“下載到RAM”或按鈕“下載到ROM”,下載成功命令和輸出窗口會有提示,同時程序下載到控制器并自動運行。
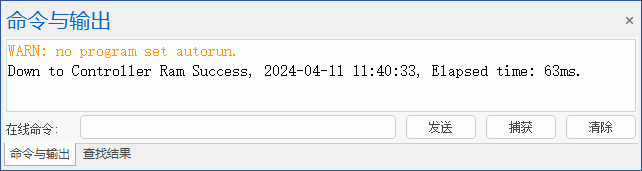
成功下載到RAM
成功下載到ROM
“RAM下載”掉電后程序不保存,“ROM下載”掉電后程序保存。下載到ROM的程序下次連接上控制器之后程序會自動按照任務號運行。
02 連接控制器
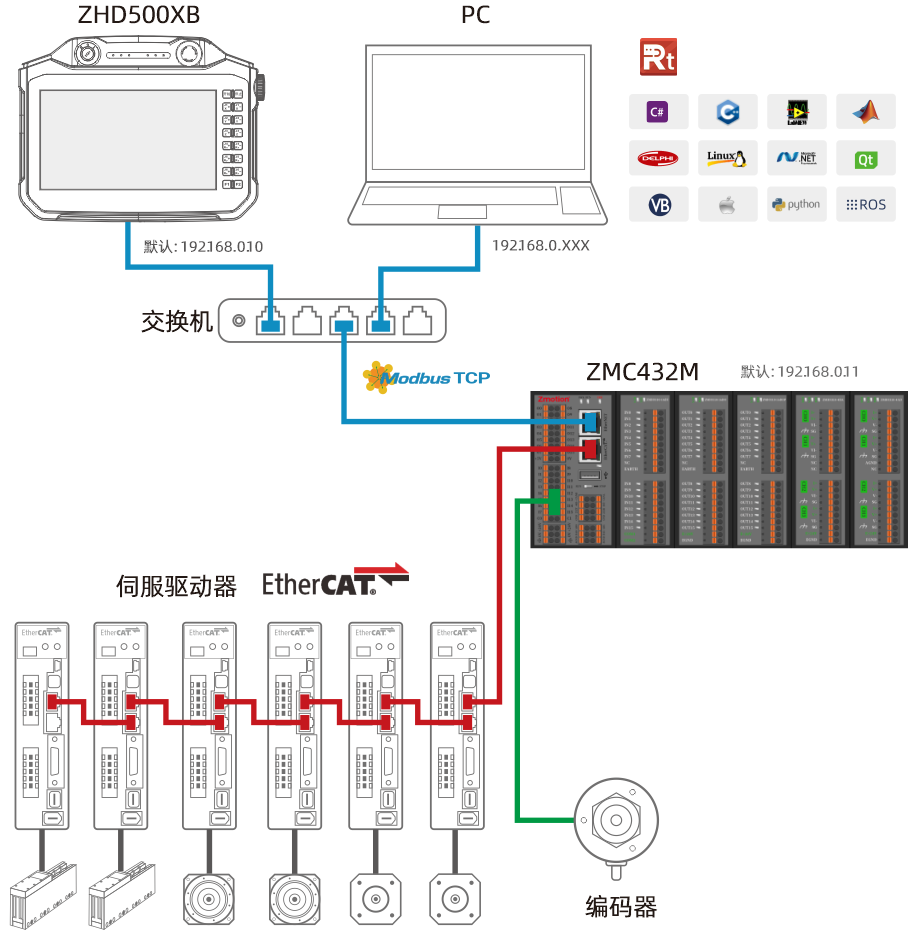
所有控制產品使用的第一步,便是先建立通訊連接,成功連接后才能控制設備,通用的連接方式有兩種,網口或串口,一般推薦使用網口連接,連接方便且通訊速度更快。
針對ZMC/ECI/XPLC/VPLC5系列可采用網口或串口連接控制設備,控制設備的網口標識為ETHERNET,物理連接無誤后,即可在電腦上操作通訊連接;搭載MotionRT實時內核的產品還支持LOCAL本地連接,例如XPCI/XPCIE/VPLC7系列,交互速度更快。
前提:需要先給控制器設備供電,并使用對應通信接線(如:網線、串口線等)與上位機通訊。
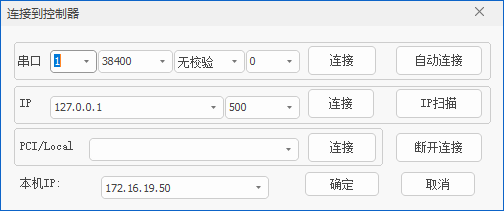
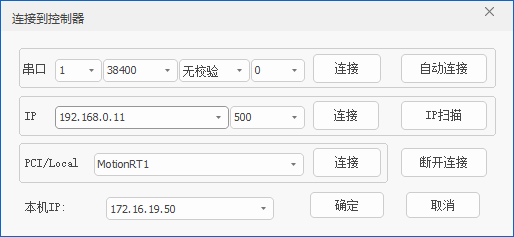
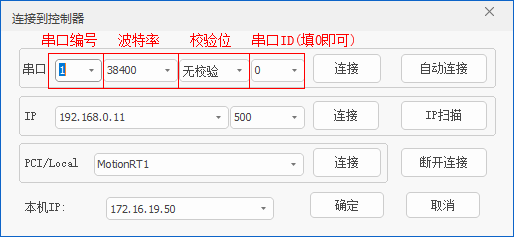
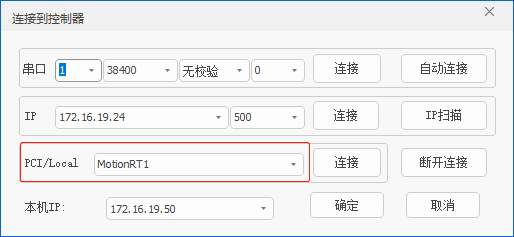
在RTSys軟件中,通過“控制器”→“連接”→“控制器”菜單,可以連接到控制器。RTSys支持串口、以太網口、PCI/Local三種方式連接到控制器,如下圖所示。
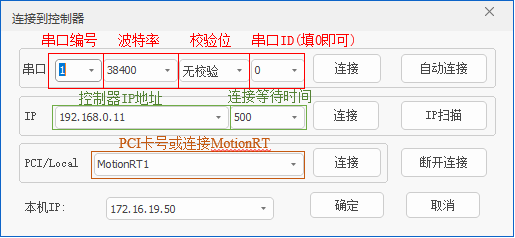
上述窗口各參數介紹如下:
1.串口參數:串口編號,波特率,是否校驗,串口ID(填0即可)。
2.IP:控制器IP地址,連接等待時間。
3.PCI/Local:PCI卡號或連接MotionRT。
使用下文介紹的任意一種方法連接后,如何查看是否連接成功?
可在命令與輸出窗口查看是否有打印對應型號的如下信息,如有打印無報錯,則說明控制器連接成功。
???網口連接
IP地址列表下拉選擇時,會自動查找當前局域網可用的控制器IP地址。
控制器出廠的默認IP地址為192.168.0.11,“連接到控制器”窗口能顯示出本機IP地址,電腦需要設置IP地址與控制器IP處于同一網段才能連接,即四段的前三段要相同,最后一段不同才可通訊。
其中VPLC5系列控制器包含兩個網口,LAN1網口默認地址192.168.0.11,LAN2網口默認地址192.168.1.11。如下圖通過“連接到控制器”窗口,可以快速查看本機IP,請注意設置有線網卡與無線網卡各自的IP。
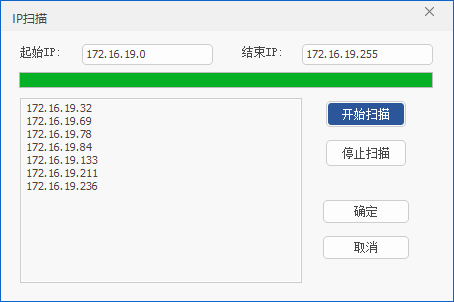
同一個網絡有多個控制器的時候,若在IP下拉列表處未找到控制器IP地址的話,可以采取IP掃描來查看。
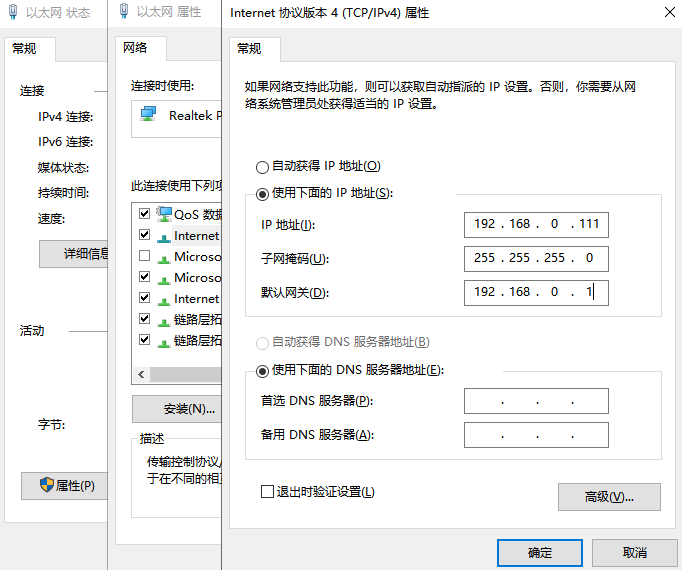
1.PC端IP地址修改方法
查看電腦本地IP協議版本4地址是否為192.168.0.xxx,前三段與控制器一致,最后一段不能一樣,控制器出廠默認IP:192.168.0.11。如果IP地址的第三段不一樣,則需要將對應的子網掩碼改為0。設置好之后再進行軟件連接。
2.控制器IP地址修改方法
前提:需要控制器與RTSys軟件先連接成功,才可修改控制器IP地址。
若忘記了控制器IP地址,想要修改控制器IP,此時只能先通過串口連接控制器(串口連接方法參考下文),獲取控制器IP地址,然后修改控制器IP或本機IP使二者處于同一網段。
修改控制器IP地址方法有多種:
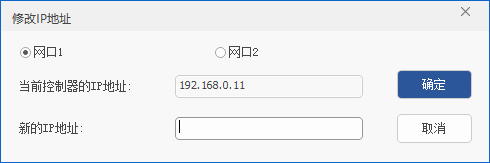
方法一:在RTSys軟件中點擊菜單欄“控制器”→“修改IP地址”,彈出如下窗口,此時會顯示當前控制器網口1的IP地址(若使用的是網口2,需切換至網口2再進行操作,并且兩個網口的網段不能在同一個網段),在窗口直接輸入新的IP地址即可修改控制器IP。點擊“確定”后等待軟件自動斷開連接后,重新選擇連接到新的控制器IP即可。
方法二:在RTSys軟件的“命令與輸出”窗口→“在線命令”,使用指令IP_ADDRESS可進行修改。在線命令輸入:IP_ADDRESS=xxx.xxx.xxx.xxx(新的控制器IP地址),如下圖所示:
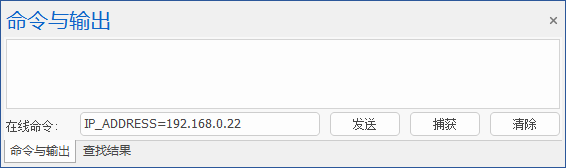
修改IP后,控制器與RTSys的連接會斷開,此時再次選擇新設置的IP地址連接即可。
3.控制器IP地址查看方法
前提:控制器與RTSys軟件成功連接!
方法一:在RTSys菜單欄“控制器”→“控制器狀態”查看。
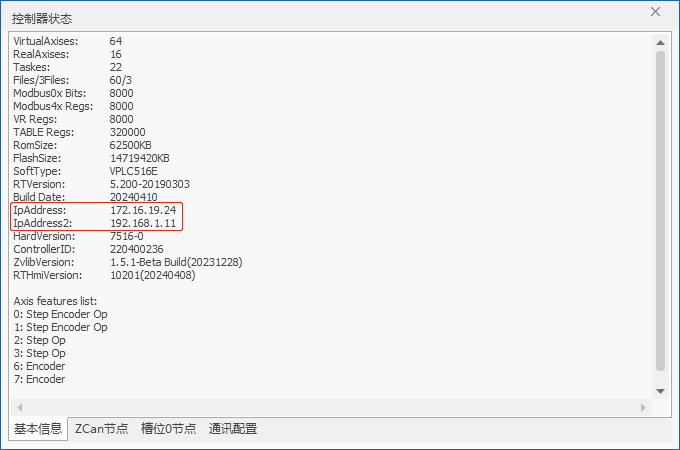
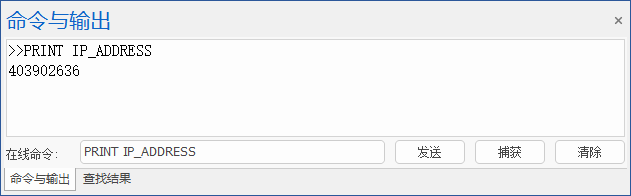
方法二:在線命令獲取控制器IP地址,輸入:PRINT IP_ADDRESS,如下圖所示:
注意:打印后得到的數據為十進制,需要自行轉換成二進制,才能得到正常的四個網段信息。
???串口連接
使用該方式連接控制器,需先用串口線連接至上位機,連接時需保證上位機的串口參數與控制器的串口參數一致。(控制器串口默認參數波特率38400,數據位8,停止位1,校驗位無)
在RTSys軟件中,點擊“連接”→“控制器”打開窗口,在第一行的串口編號,當串口列表下拉選擇時,會自動列出本計算機上可用的串口號,選擇需要連接的串口編號,并設置好波特率、校驗位之后,點擊串口行的“連接”按鈕,連接是否成功會在軟件輸出窗口自動打印出相應信息。
若使用USB連接會自動生成虛擬串口,選擇串口號來連接即可。
若連接失敗,可參考下面方法依次排查:
1.查看串口連接線是否為雙絞屏蔽線,屏蔽電纜是否接地。
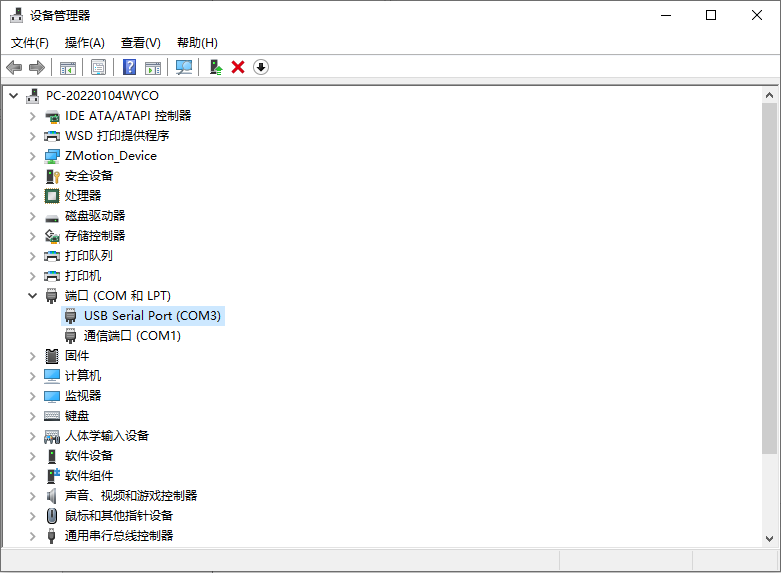
2.“連接到控制器”里的COM口編號、參數是否選擇正確。
打開電腦“設備管理器”→“端口”→“通信端口(COM)”→“端口設置”,查看COM口設置是否被識別及查看端口號。
3.當通過串口連接到控制器時,對應的控制器串口必須配置為MODBUS從站協議模式(缺省模式),斷電重啟即可恢復。
4.COM口是否已被其他程序占用,如串口調試助手等。
5.PC端是否有足夠的串口硬件。
6.更換串口線/電腦測試。
???PCI連接
PCI連接方式一般用于RTSys與正運動PCI、PCIE系列運動控制卡進行通訊,該連接方式用于掃描工控機上已插入的PCI、PCIE運動控制卡卡號,找到對應的卡號進行連接。
注意:使用PCI、PCIE卡前需先根據用戶手冊安裝驅動。
???LOCAL連接
LOCAL連接方式一般用于RTSys與MotionRT進行實時通訊,常與正運動XPCI/XPCIE系列運動控制卡搭配使用。該連接方式需將控制卡插入計算機/工控機卡槽中,根據對應用戶手冊安裝MotionRT驅動后,打開MotionRT軟件進行相應配置后點擊啟動,在RTSys中Local欄即可掃描到MotionRT,選擇對應的MotionRT即可實現連接。一個MotionRT序號對應一個運動控制卡。(MotionRT軟件相關使用可參考《MotionRT使用說明手冊》)
連接是否成功會在[命令與輸出]窗口打印對應信息。
注:使用運動控制卡與RTSys連接一般建議優先使用Local連接方式。
03 操作流程(省流版)
注意事項:
1.打開工程項目時,選擇打開項目.zpj文件,若只打開其中的.Bas文件,程序無法下載到控制器。
2.ZMC0系列部分型號不支持下載到RAM。
3.不建立項目的時候,只有.bas文件無法下載到控制器。
4.自動運行的數字0表示任務編號,以任務0運行程序,任務編號不具備優先級。
5.必須至少有一個文件設置自動運行任務號,若整個工程項目內的文件都不設置任務編號,下載到控制器時,系統提示如下信息:WARN: no program set autorun.
04 跑道插補運動例程演示
使用正運動技術控制器配合RTSys軟件進行雙軸插補運動開發(若無控制器也可以用仿真器進行開發),本例使用Basic語言開發。
按照上述操作流程新建Basic文件后,將以下代碼復制到basic文件編程區域,連接控制器/仿真器后,點擊“下載到RAM”或“下載到ROM”即可運行。
DIM length,radius '定義長度,半徑 length=100 radius=50 BASE(0,1) ATYPE=1,1 '設為脈沖軸類型 UNITS=100,100 DPOS=0,0 SPEED=100,100 ACCEL=1000,1000 DECEL=1000,1000 VP_MODE=7,7 'SS曲線 SRAMP=100 'S曲線 TRIGGER '自動觸發示波器 MOVE(length,0) '直線插補 MOVECIRC(0,radius*2,0,radius,0) '圓弧插補 MOVE(-length,0) MOVECIRC(0,-radius*2,0,-radius,0) END
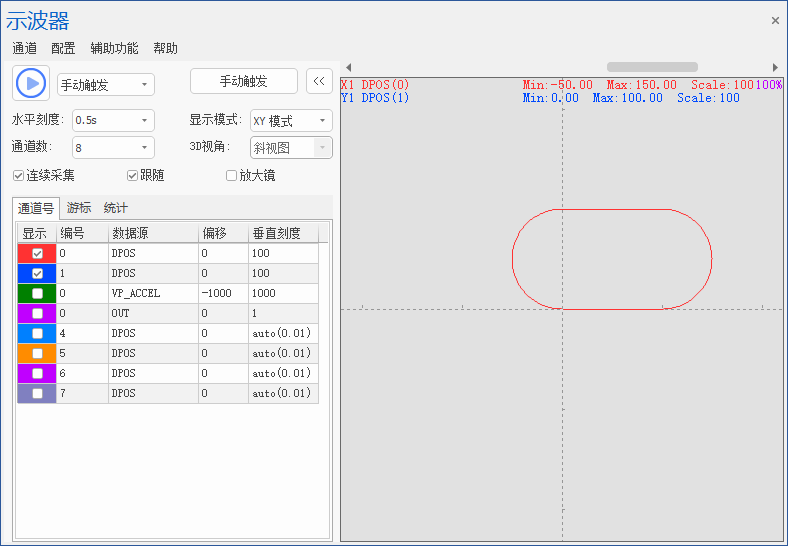
運行時可通過RTSys自帶的示波器工具進行插補軌跡查看。
1.示波器YT模式下插補運動,位置、速度與時間的關系曲線如下圖。
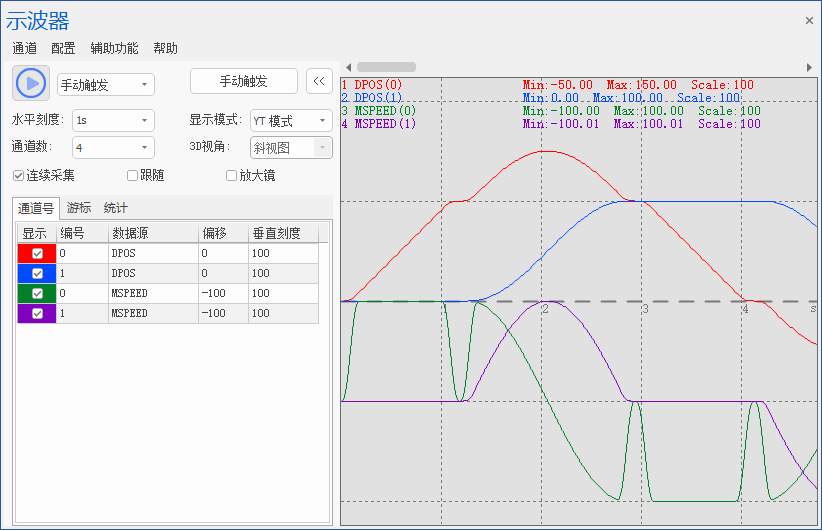
2.示波器XY模式下的插補運動軌跡如下圖。
常見問題
01 使用RTSys程序無法下載到控制器/仿真器(下載按鈕是灰色的)
1.沒有建立項目或沒有打開項目.zpj文件,建立項目后把程序文件加入項目。
2.沒有連接到控制器。
3.部分控制器只支持下載到ROM,不支持下載到RAM。
02 點擊“下載RAM/ROM”按鈕后程序沒運行?(報錯:WARA:no program set autorun)
原因:程序文件沒有指定自動運行的任務號。
解決方法:給至少一個程序文件設置自動運行任務號。(如下圖示例)
03 下載程序后報錯:“Error:5002,Operate Failed!”
原因:程序中有多個同時運行的hmi任務,大部分控制器的hmi任務僅支持同時運行一個。
解決方法:刪掉多余的hmi任務,保證只有一個hmi任務運行。
04 非中國大陸操作系統使用RTSys中文版出現亂碼?
原因:系統不同導致編碼格式中文無法識別。
解決方法:
1.在電腦上“win+R”輸入“cmd”打開命令提示符界面;
2.輸入命令:chcp,即可得到該系統的代碼頁編號。如大陸系統代碼頁默認為936。
得到代碼頁編號后,到RTSys安裝文件目錄下打開“Language”文件夾→打開“zlang2.dat”(簡體中文)文件→找到代碼行“Lang=936”→將936改為剛剛cmd查到的代碼頁編號。
教學視頻可點擊→“教學視頻:自主自研運動控制集成開發平臺RTSys(一):快速入門”查看。
本次,正運動技術自主自研運動控制集成開發平臺RTSys(一):快速入門,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
408瀏覽量
24809 -
運動控制
+關注
關注
4文章
588瀏覽量
32982 -
運動控制卡
+關注
關注
7文章
114瀏覽量
15510 -
運動控制系統
+關注
關注
0文章
92瀏覽量
14178 -
正運動技術
+關注
關注
0文章
104瀏覽量
454
發布評論請先 登錄
相關推薦
自動駕駛全棧自研可行嗎?
成功量產!德明利實現SATA SSD存儲控制芯片關鍵IP和技術平臺全自研

成功量產!德明利實現SATA SSD存儲控制芯片關鍵IP和技術平臺全自研

德賽電池自研云平臺 與時間賽跑的那朵“云”







 工商網監
工商網監
評論