") 友思特分享 繪制江河湖海:uEye相機助力水路航道自動3D測繪系統(tǒng)
友思特分享 繪制江河湖海:uEye相機助力水路航道自動3D測繪系統(tǒng)
導(dǎo)讀
TAPS 是德國 Fraunhofer 研究所為河道測量而設(shè)計的半自動測向系統(tǒng),通過搭載兩臺友思特uEyeFA工業(yè)相機實現(xiàn)對海岸區(qū)域進行高效精準的三維建模和航道地圖重建。
水路航道測繪的新選項
準確的航道地圖是實現(xiàn)安全、高效航運交通的先決條件。在德國,聯(lián)邦海事和水文局等機構(gòu)以及私人港口運營商都有義務(wù)隨時提供最新版本的航道地圖。這樣做的主要原因是為了避免因路線不正確或過時而造成事故。它涉及聯(lián)邦水道的分類、里程、現(xiàn)有水閘、升降機和攔河壩、其他周邊水域、地點和邊界等信息。目前,測繪工作由經(jīng)過培訓(xùn)的人員在傳統(tǒng)船舶上進行,這必然導(dǎo)致大量耗費時間和金錢成本,還可能出現(xiàn)在某一特定位置的測量時間過長的情況,效率十分低下。
通過具有避障和交通探測功能的自主平臺對水道進行半自動監(jiān)測,可以優(yōu)化這一過程,并在更短的時間內(nèi)提供地圖。Fraunhofer光電、系統(tǒng)技術(shù)和圖像開發(fā)研究所(IOSB),利用一個為期3年的內(nèi)部研究項目,開發(fā)出了一種能夠自主勘測水體的自動水面飛行器,并使用聲納進行記錄。該設(shè)備通過友思特伙伴 IDS 生產(chǎn)的帶有兩臺集成工業(yè)相機的光學(xué)系統(tǒng)對堤岸區(qū)域及其表面結(jié)構(gòu)進行監(jiān)控,并將所獲信息整合并傳輸?shù)街車h(huán)境的三維地圖中。
搭載IDS相機的半自動測向系統(tǒng)
精確測量水體是一項具有挑戰(zhàn)性的任務(wù)。TAPS 是Fraunhofer IOSB 為河流和湖泊設(shè)計的半自動測向系統(tǒng),能夠在水下和水上進行測量。該設(shè)備尺寸約為 2×1.5×1m,可沿相關(guān)水道行駛,并自動避開靜止或移動的障礙物,能夠以 3.7km/h 的速度執(zhí)行連續(xù)20個小時的測繪任務(wù)。
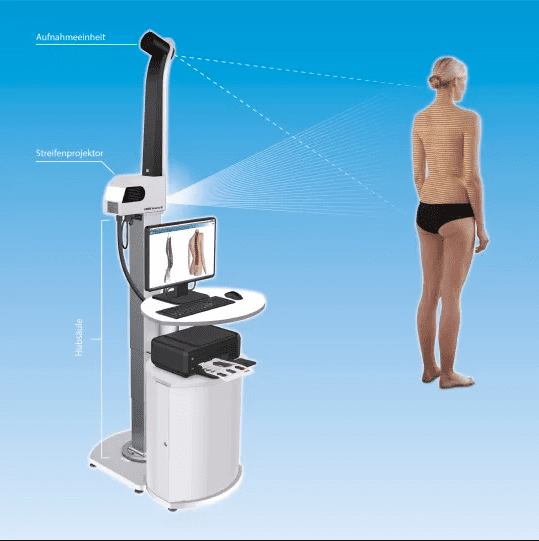
為了繪制海岸區(qū)域的可視地圖,TAPS 在桅桿上安裝了兩臺 uEye工業(yè)相機,分別面向右舷和左舷,保證視場不重疊。借由高分辨率工業(yè)相機,可以對碼頭巖壁等相關(guān)基礎(chǔ)設(shè)施進行視覺檢查,并根據(jù)記錄的圖像數(shù)據(jù)對海岸區(qū)域進行三維建模。
表面結(jié)構(gòu)的 3D 模型
“我們使用自動系統(tǒng)進行智能圖像采集,當相機對準預(yù)設(shè)的感興趣區(qū)域時,圖像記錄就會開始”,F(xiàn)raunhofer IOSB 自主機器人系統(tǒng)研究小組的攝影測量學(xué)專家 Boitumelo Ruf 說:“車輛自身的運動只用于存儲從不同角度記錄的圖像數(shù)據(jù),因此在內(nèi)容方面具有附加值。GNSS(全球?qū)Ш叫l(wèi)星系統(tǒng),如 GPS)和 IMU(用于確定位置的慣性測量單元)數(shù)據(jù)是確定 TAPS 平臺位置和方向的基礎(chǔ)。在拍攝圖像時,會使用當前的 GNSS 位置數(shù)據(jù)來豐富圖像,并使用 IMU 來分配精確坐標。”
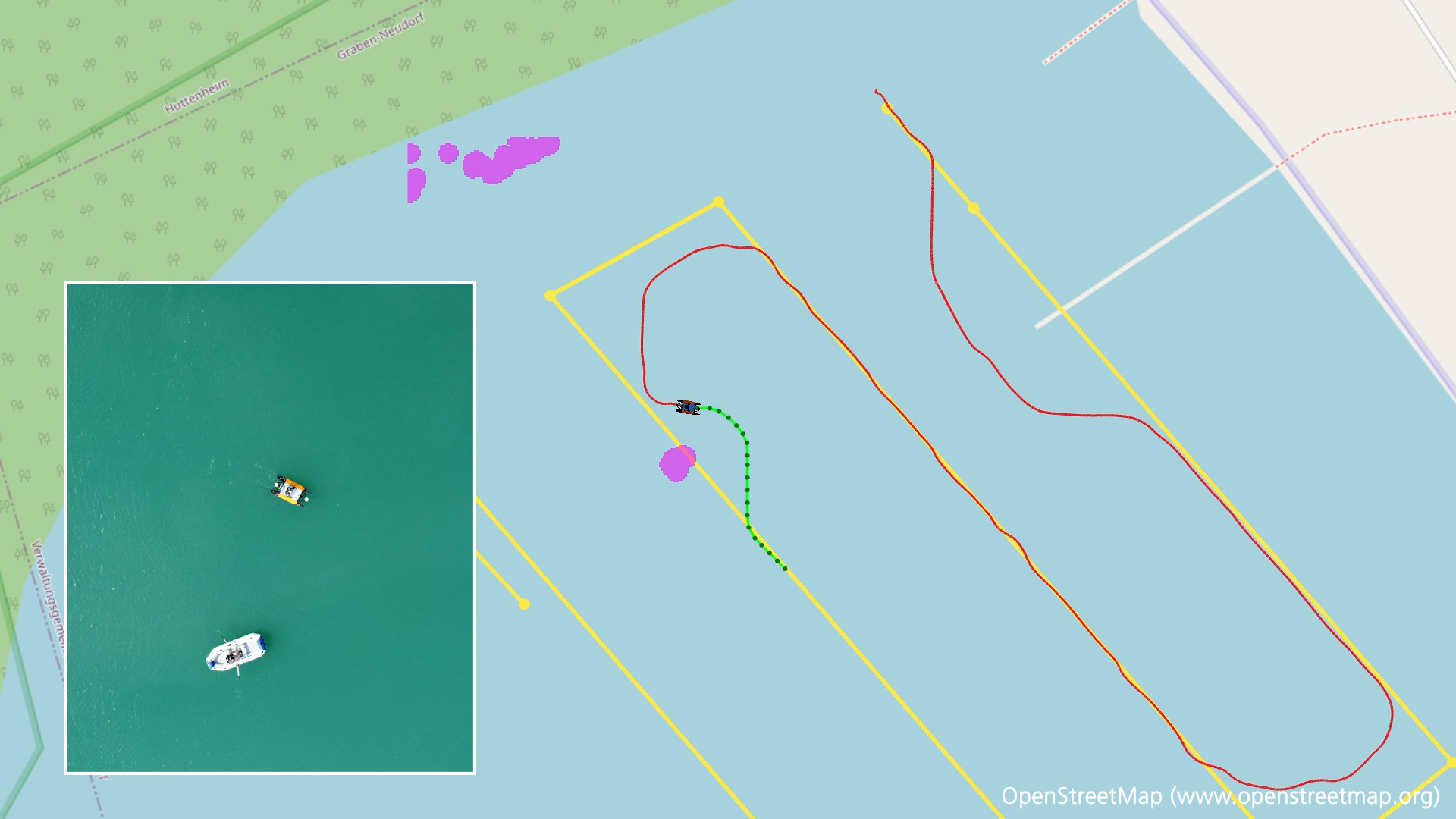 水上飛機可自動環(huán)繞充氣船航行
水上飛機可自動環(huán)繞充氣船航行
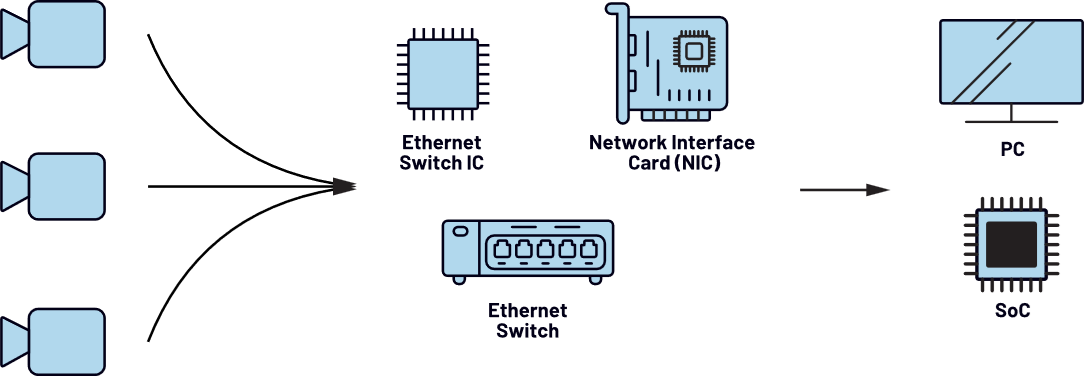
數(shù)據(jù)采集完成后,所記錄圖像與 GNSS 數(shù)據(jù)一起傳送到地面控制站,在那里進行攝影測量重建。Boitumelo Ruf 詳細介紹了這一程序:“除其他外,我們還使用 COLMAP 攝影測量工具箱。它利用出色的圖像特征,首先對輸入圖像進行比較,計算出它們的相對位置,然后創(chuàng)建一個逼真的三維環(huán)境模型。然后,我們使用該工具逐個像素地匹配圖像,即搜索對應(yīng)的像素并準確合并。其結(jié)果是使用 GNSS 位置進行地理參照的密集三維點云,即提供相應(yīng)的當前坐標"。生成的三維模型隨后可用于如目視檢查或堤岸監(jiān)測等其他任務(wù)中。
堅固耐用的工業(yè)相機可抵御風雨
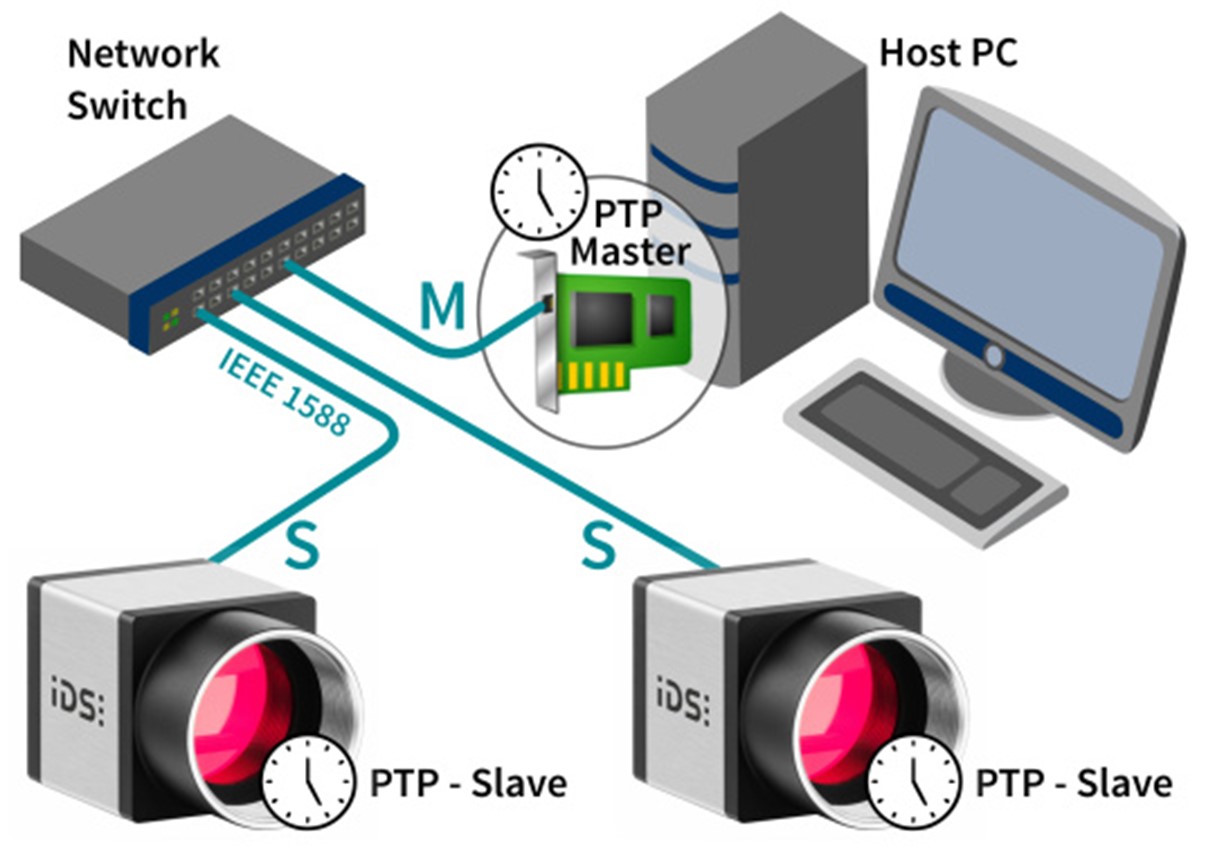
在相機方面,F(xiàn)raunhofer研究所使用了兩臺 IDS uEyeFA工業(yè)相機。帶 PoE 的堅固耐用型號是苛刻環(huán)境的理想選擇。相機外殼、鏡筒和螺紋接頭符合 IP65/67 防護等級的要求,因此具有最佳的防污、防塵和防水功能。
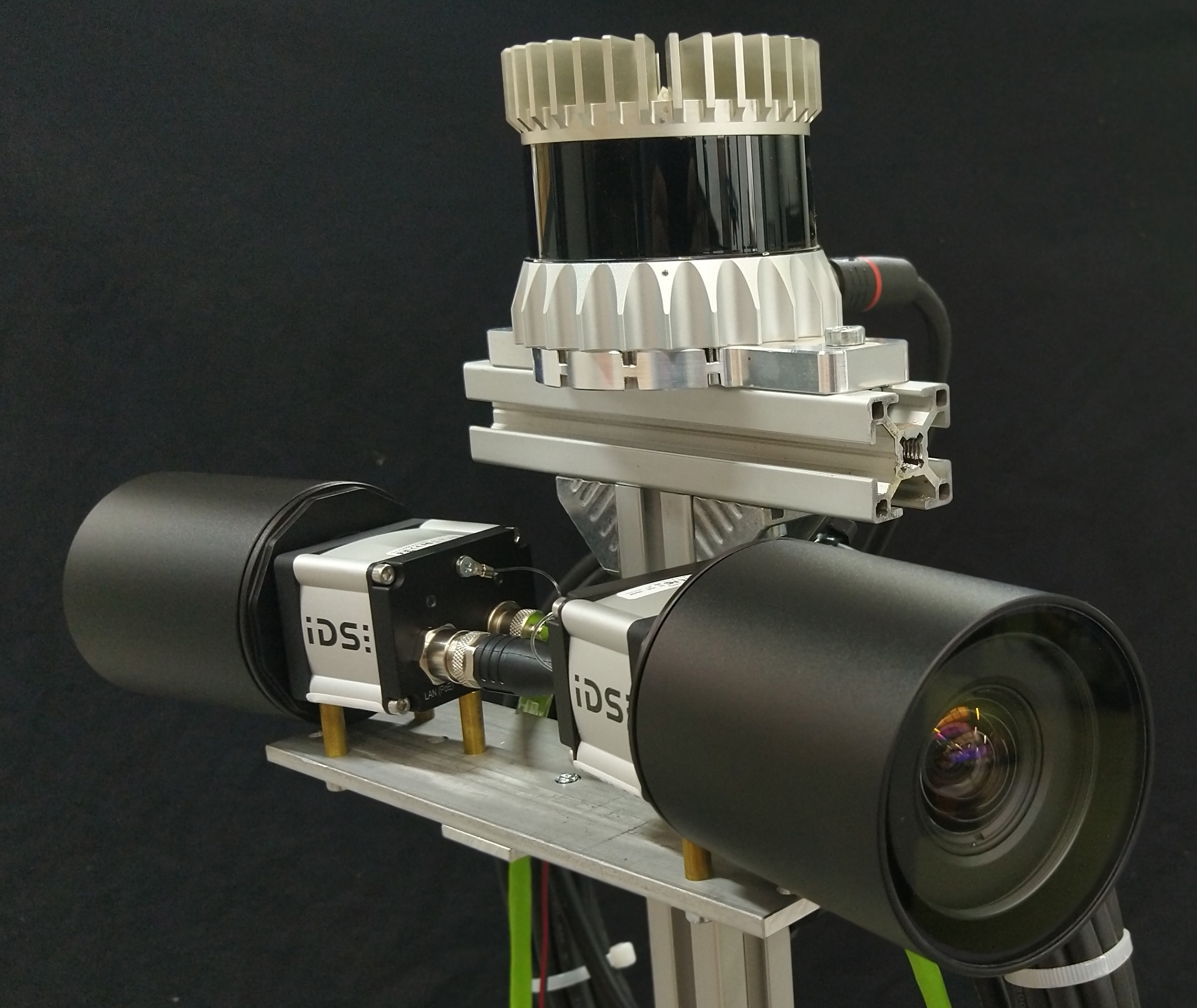 TAPS 在桅桿上安裝了兩臺來自 IDS 的?uEye?FA 工業(yè)相機,用于繪制海岸線區(qū)域的可視地圖
TAPS 在桅桿上安裝了兩臺來自 IDS 的?uEye?FA 工業(yè)相機,用于繪制海岸線區(qū)域的可視地圖
所使用的型號配備了索尼公司生產(chǎn)的 IMX304 大尺寸 1.1 英寸 CMOS 傳感器,可提供分辨率為 4096 × 3000 像素的非常清晰的無噪點圖像。Pregius 系列第二代像素的全局快門傳感器具有出色的動態(tài)范圍和極高的靈敏度,特別適用于計量等應(yīng)用領(lǐng)域。
正是這些特點決定了 Fraunhofer 研究所對相機的選擇。除了堅固耐用和不受天氣影響外,對相機的重要要求還包括外形小巧和圖像分辨率高,以便進行詳細的目視檢查。傳感器還應(yīng)具有較高的動態(tài)范圍,以便在晴天和陰天都能捕捉到細節(jié)豐富的圖像。通過標準的GigEVision 接口進行集成,可為配備不同攝像頭的多個系統(tǒng)開發(fā)和使用一個驅(qū)動程序。
所使用的相機能提供非常清晰、無噪音的圖像。該傳感器具有出色的動態(tài)范圍和極高的靈敏度。正是這些特點決定了我們對攝像機的選擇。——Boitumelo Ruf,F(xiàn)raunhofer IOSB 自主機器人系統(tǒng)研究小組攝影測量專家
TAPS 系統(tǒng)應(yīng)用前景
除了設(shè)備的硬件需求以外,缺乏熟練工人也是水道測量的一個主要問題。水道自動測繪不僅可以降低成本,還可以減少測繪時間,以及人工測量帶來的誤差。
TAPS 項目的目的是為這項任務(wù)開發(fā)一個原型,并在相關(guān)場景中展示其潛力。作為一個研究機構(gòu),F(xiàn)raunhofer通常會在系統(tǒng)的功能性和適用性已得到驗證的水平上進行技術(shù)開發(fā),而后進入與工業(yè)伙伴開展合作的階段。Fraunhofer IOSB 自主機器人系統(tǒng)研究小組負責人 Janko Petereit 博士表示:"我們正在積極尋找合作伙伴,共同邁出商業(yè)化的最后一步。鑒于我們初步測試的積極結(jié)果,以及對準確、最新水道地圖日益增長的需求,預(yù)計未來幾年對該項目技術(shù)的需求將十分旺盛,并用于更廣泛的領(lǐng)域。自動化水運工具可用于海上或內(nèi)陸水道的人員和貨物運輸,還可能用于挖掘水道和自主勘測。”
該項目展示了機器人系統(tǒng)與數(shù)字圖像處理之間互動的巨大潛力,未來,在視覺環(huán)境捕捉和場景解讀方面,熱門技術(shù)和應(yīng)用可能會重新洗牌。
友思特IDS相機產(chǎn)品
uEyeFA

使用PoE的高防護等級工業(yè)相機 (IP65/67),堅固耐用,防污、防塵、防濺水,內(nèi)置120MB圖像內(nèi)存,有多樣且同樣堅固的周邊配件,是各行業(yè)自動化應(yīng)用的最佳選擇。所用型號:GV-5200FA 。
客戶:Fraunhofer

Fraunhofer光電技術(shù)、系統(tǒng)技術(shù)和圖像開發(fā)研究所(IOSB)的目標是通過其在三大核心能力方面的工作,為客戶做出明智決策、優(yōu)化流程和智能控制自主系統(tǒng)提供有效支持,這也是研究所名稱的由來。主要業(yè)務(wù)范圍為新型視覺系統(tǒng)的開發(fā),包括激光光源、傳感器的最佳使用和聯(lián)網(wǎng),以及由此產(chǎn)生的數(shù)據(jù)流的處理。
了解更多?歡迎探索豐富案例:https://viewsitec.com/products/cameras/ueye/
審核編輯 黃宇
-
相機
+關(guān)注
關(guān)注
4文章
1369瀏覽量
53915 -
測繪
+關(guān)注
關(guān)注
1文章
50瀏覽量
9602 -
工業(yè)相機
+關(guān)注
關(guān)注
5文章
327瀏覽量
23763
發(fā)布評論請先 登錄
相關(guān)推薦
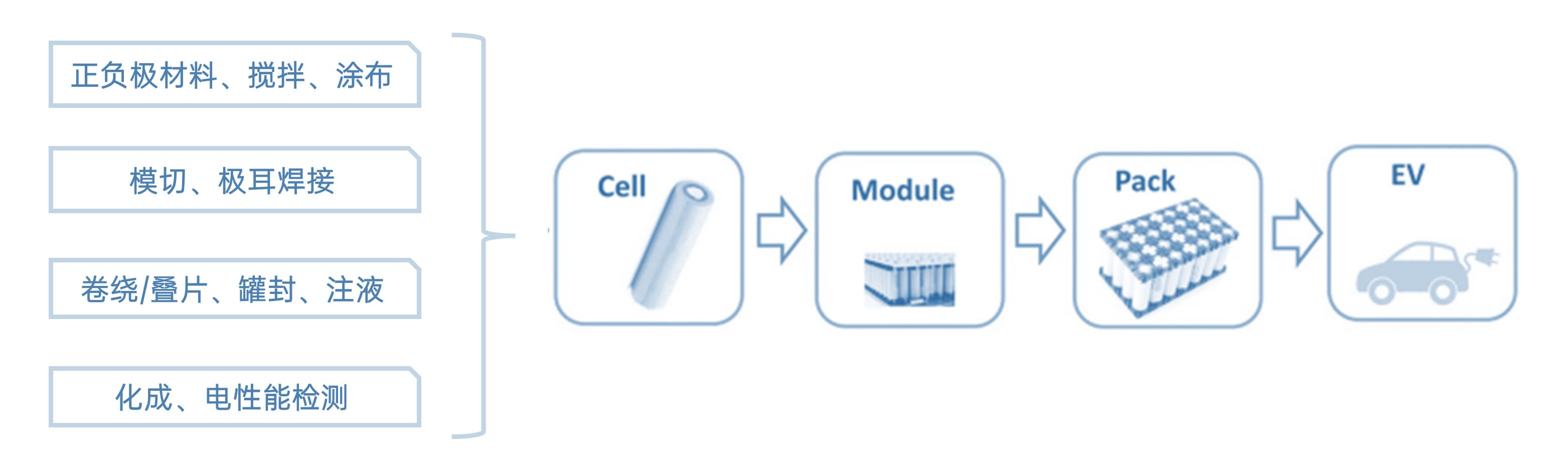
友思特方案 瞬時糾錯的智慧算法:鋰電與半導(dǎo)體多類型視覺檢測助力高效高質(zhì)生產(chǎn)
友思特分享 車載同步技術(shù)創(chuàng)新:多相機系統(tǒng)如何實現(xiàn)精準數(shù)據(jù)采集與實時處理?
友思特分享 1小時800件?Ensenso 3D相機如何加速智能機器人的分揀效率
友思特方案 多相機的完美閉環(huán):proFRAME車載全景環(huán)視相機數(shù)采方案

安寶特產(chǎn)品 安寶特3D Analyzer:智能的3D CAD高級分析工具
友思特分享 IDS uEye:全球首款兼具索尼 IMX662 彩色和單色傳感器的工業(yè)相機
友思特應(yīng)用 多接口的智駕無憂:GigE相機在自動駕駛數(shù)據(jù)采集系統(tǒng)的穩(wěn)定應(yīng)用
友思特案例 | 自研創(chuàng)新!三維工件尺寸測量及點云處理解決方案

友思特應(yīng)用 | 讓健康觀察更可靠:剛性內(nèi)窺鏡的自動視覺檢查

友思特應(yīng)用 | 逐節(jié)測量椎骨:借助uEye工業(yè)相機進行光學(xué)脊柱和姿態(tài)分析
友思特應(yīng)用 | 低成本OCT成像技術(shù),助力軟包電池極耳膠帶多維度檢測應(yīng)用
友思特應(yīng)用 | 穩(wěn)步前行:基于FPGA 3D相機實現(xiàn)輪胎定位檢測應(yīng)用

友思特應(yīng)用 | 高精度呈現(xiàn):PCB多類型缺陷檢測系統(tǒng)


友思特案例 | 雙目散斑3D視覺引導(dǎo)自動化上下料解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論