") 多臺(tái)倉(cāng)儲(chǔ)AGV協(xié)作全局路徑規(guī)劃算法的研究
多臺(tái)倉(cāng)儲(chǔ)AGV協(xié)作全局路徑規(guī)劃算法的研究
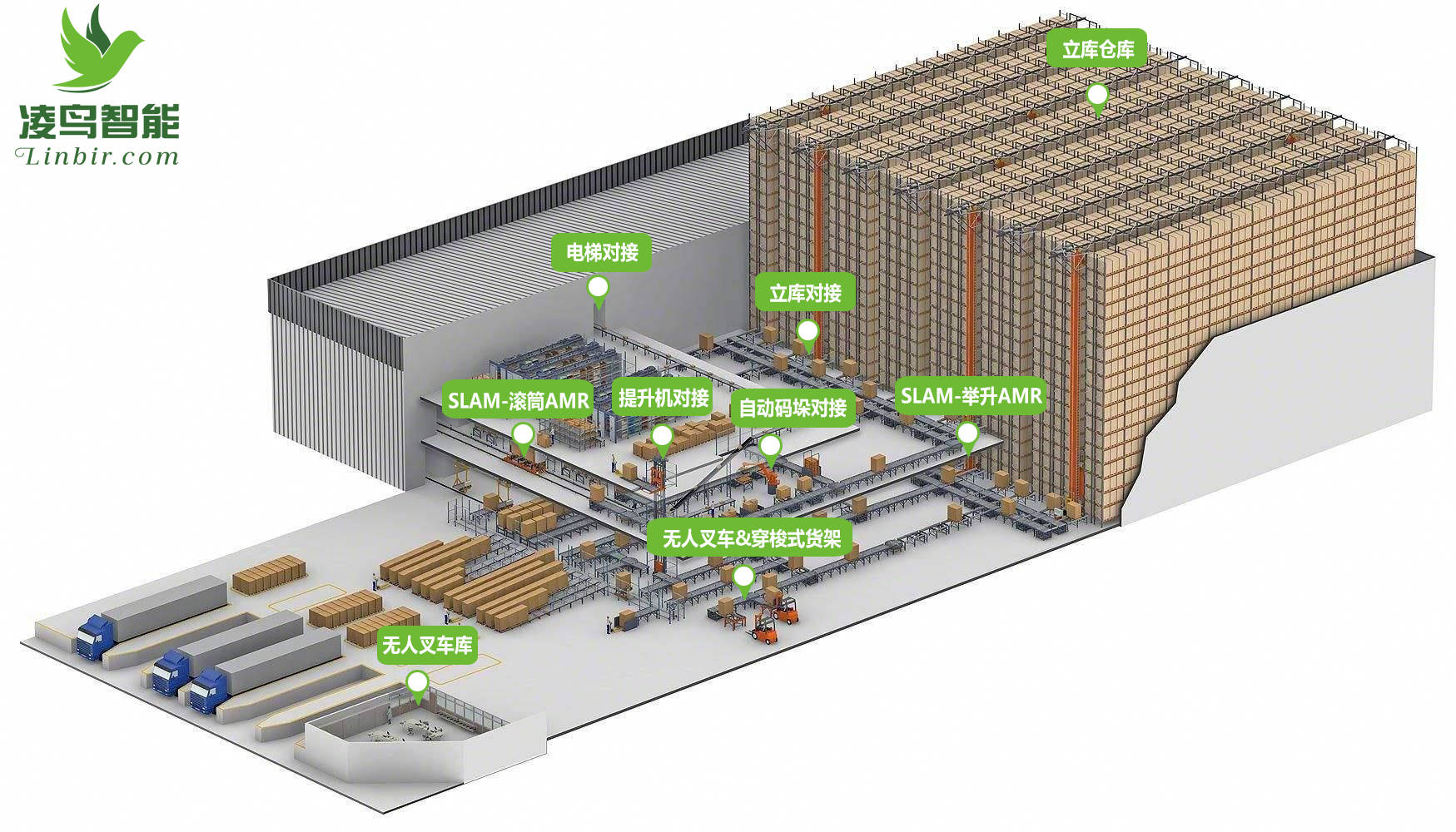
對(duì)于自動(dòng)導(dǎo)引車(Automated Guided Vehicle,AGV)的單機(jī)路徑規(guī)劃問題,已存在很多靜態(tài)算法可以有效求解。但由于 AGV間搶占系統(tǒng)資源的相互影響和制約,多臺(tái)AGV的協(xié)同作業(yè)會(huì)出現(xiàn)死鎖、碰撞沖突等問題,靜態(tài)路徑規(guī)劃算法無法滿足實(shí)時(shí)動(dòng)態(tài)作業(yè)的系統(tǒng)需求。智能倉(cāng)儲(chǔ)系統(tǒng)中,多AGV動(dòng)態(tài)路徑規(guī)劃的核心問題不再僅是單AGV快速求解最優(yōu)路徑,而在于多臺(tái)AGV的沖突避免或解決,達(dá)到整體協(xié)調(diào)最優(yōu)。
倉(cāng)儲(chǔ)AGV
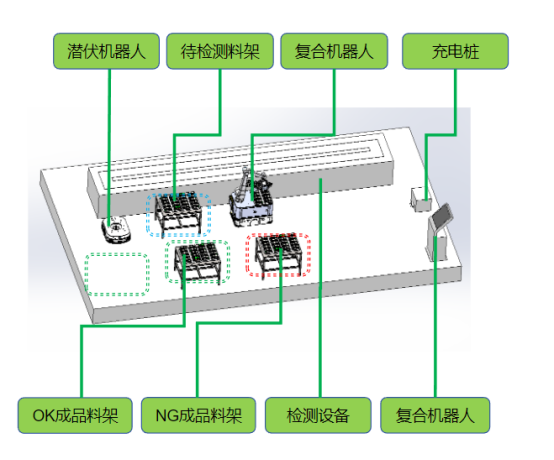
要使得多個(gè)機(jī)器人在道路規(guī)劃上最優(yōu),無非是在單個(gè)小車規(guī)劃路徑時(shí)考慮其他小車的行駛路線,進(jìn)而選取最優(yōu)的一個(gè)行駛方案。另外,不同于室外場(chǎng)景,我們?cè)趥}(cāng)庫中規(guī)劃小車路徑,整個(gè)道路都是可以設(shè)計(jì)的,所以我們的問題可拆解為:
(1) 倉(cāng)庫中道路的設(shè)計(jì);
(2) 獲取到其他小車的路徑行駛狀態(tài);
(3) 定義可能的道路擁堵;
(4)規(guī)劃最短路徑;
(5) 交通管制。
 多AGV
多AGV
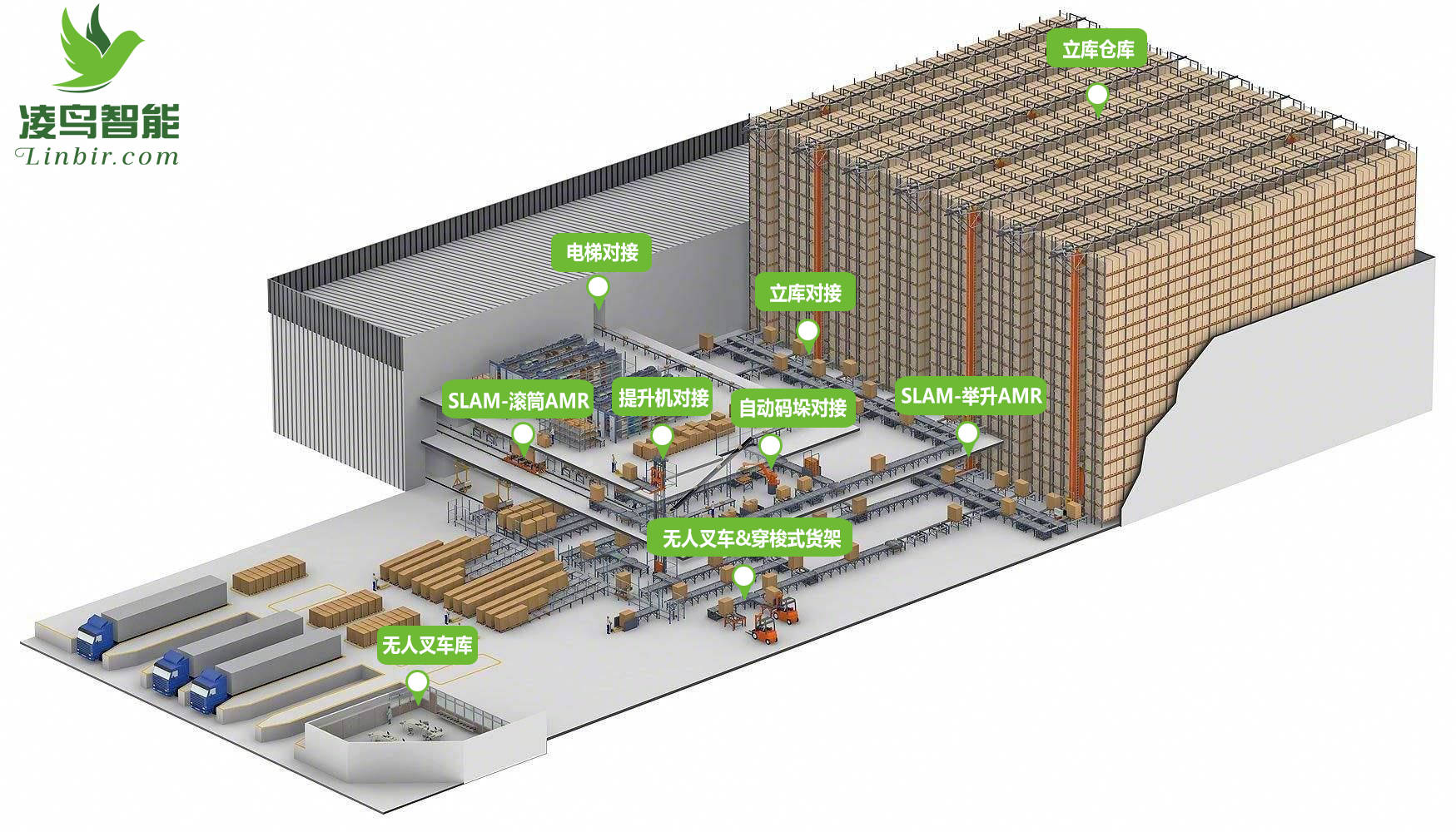
在規(guī)劃AGV小車路徑時(shí),要在考慮到道路擁堵的情況下去規(guī)劃最短路徑,以滿足整體規(guī)劃結(jié)果最優(yōu),使用A*算法,用G值為參考檢查新的路徑是否更好, 將地圖中其他小車規(guī)劃的路徑的點(diǎn)的G值增加,即可盡量避免搜索到相同的路徑,同樣的道理,在車輛需要轉(zhuǎn)彎的時(shí)候,也同樣增加轉(zhuǎn)彎下一點(diǎn)的G值,從而規(guī)劃路徑盡量避免轉(zhuǎn)彎的情況出現(xiàn),來達(dá)到整體效率最高,全局路徑最優(yōu)。
此外,由于路徑規(guī)劃都是靜態(tài)規(guī)劃的路徑,車輛在行走過程中同時(shí)需要對(duì)每輛小車進(jìn)行鎖格的交通管制,來保證車輛不會(huì)相撞。
 AGV小車
AGV小車
企業(yè)必須認(rèn)識(shí)到,過去靠勞動(dòng)密集型低端產(chǎn)業(yè)獲得原始積累的老路子已經(jīng)走到頭了,依靠各種創(chuàng)新,才是制造業(yè)的唯一出路。但是抱著“別人有我也有”的思路去上馬AGV物流項(xiàng)目,失敗是必然的,“有”和“有用”有著天壤之別,一定要在創(chuàng)新的基礎(chǔ)上,響應(yīng)用戶自身的需求。如用途、場(chǎng)地、成本、產(chǎn)品檔次等情況。
合理規(guī)劃AGV小車路徑,減少交通堵塞問題,一個(gè)良好的路徑規(guī)劃,不但可以使多臺(tái)AGV小車降低道路堵塞的風(fēng)險(xiǎn),還可以讓物流系統(tǒng)更加順暢,搬運(yùn)效率更高。
審核編輯 黃宇
-
AGV
+關(guān)注
關(guān)注
27文章
1331瀏覽量
41257 -
AGV小車
+關(guān)注
關(guān)注
4文章
173瀏覽量
11196
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
智能工廠AGV引入需要注意的一些地方
AGV小車的工作原理是什么?
AGV在倉(cāng)儲(chǔ)物流中的應(yīng)用

AGV智能無人搬運(yùn)車如何實(shí)現(xiàn)自動(dòng)化運(yùn)作

科技驅(qū)動(dòng)的智能倉(cāng)儲(chǔ):AMR與AGV的無縫結(jié)合
告別人工搬運(yùn),AGV倉(cāng)儲(chǔ)物流已起飛!
凌科DH系列連接器在AGV倉(cāng)儲(chǔ)機(jī)器人上的優(yōu)勢(shì)分析
智能時(shí)代小巨人:地牛AGV搬運(yùn)機(jī)器人

從平庫到立庫:AGV驅(qū)動(dòng)下的倉(cāng)儲(chǔ)轉(zhuǎn)型升級(jí)

智能調(diào)度 多臺(tái)AGV為什么不會(huì)撞在一起?
AGV的四點(diǎn)關(guān)鍵技術(shù),你都了解嗎?

AGV系統(tǒng)設(shè)計(jì)解析:布局-車體-對(duì)接-數(shù)量計(jì)算-路徑規(guī)劃

產(chǎn)線AGV和倉(cāng)儲(chǔ)AGV到底有什么不同?
智慧倉(cāng)儲(chǔ)AGV遠(yuǎn)程監(jiān)控管理系統(tǒng)解決方案
AGV與智能倉(cāng)儲(chǔ)系統(tǒng)集成的實(shí)踐與優(yōu)化
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論