 利用SoC FPGA的工業設計和電機控制
利用SoC FPGA的工業設計和電機控制
在工業系統中選擇器件需要考慮多個因素,其中包括:性能、工程變更的成本、上市時間、人員的技能、重用現有IP/程序庫的可能性、現場升級的成本,以及低功耗和低成本。
工業市場的近期發展推動了對具有高集成度、高性能、低功耗FPGA器件的需求。設計人員更喜歡網絡通信而不是點對點通信,這意味著可能需要額外的控制器用于通信,進而間接增加了BOM成本、電路板尺寸和相關NRE(一次性工程費用)成本。
總體擁有成本用于分析和估計購置的壽命周期成本,它是所有與設計相關的直接和間接成本的擴展集,包括工程技術成本、安裝和維護成本、材料清單(BOM)成本和NRE(研發)成本等。通過考慮系統級因素有可能最大限度地減少總體擁有成本,從而帶來可持續的長期盈利能力。
美高森美公司(Microsemi)提供具有硬核ARM Cortex-M3微控制器和IP集成的SmartFusion2 SoC FPGA器件,它采用成本優化的封裝,具有減少BOM和電路板尺寸的特性。這些器件具有低功耗和寬溫度范圍,能夠在沒有冷卻風扇的極端條件下可靠地運行。SmartFusion2 SoC FPGA架構將一個硬核ARM Cortex-M3 IP與FPGA架構相集成,可以實現更大的設計靈活性和更快的上市時間。美高森美為電機控制算法開發提供了具有多個多軸電機控制參考設計和IP的生態系統,使由多處理器解決方案轉向單一器件解決方案(即SoC FPGA)更加容易。
影響TCO的因素
以下是影響系統TCO的一些因素。
(1)長壽命周期。FPGA可以在現場部署之后進行重新編程,這延長了產品的壽命周期,從而使設計人員能夠專注于新產品開發,實現更快的上市時間。
(2)BOM.美高森美基于閃存技術的FPGA在上電時無需啟動PROM或閃存MCU來加載FPGA,它們是零級非易失性/即時啟動器件。與基于SRAM的FPGA器件不同,美高森美基于閃存的FPGA無需附加上電監控器,這是因為閃存開關不會隨電壓而改變。
(3)上市時間。OEM廠商之間的激烈競爭迫切需要更多的產品差異化和更快的上市時間。經過驗證的IP模塊可大幅縮短設計時間。目前已經可以提供多個構建工業解決方案所需的IP模塊,同時更多的模塊正在開發中。SoC表現出的另一個獨特優勢是可以用于調試FPGA設計。為了調試FPGA設計,可以通過用于調試的高速接口,利用微控制器子系統從FPGA中提取信息。
(4)工程工具成本。與FPGA開發工具昂貴的概念相反,美高森美提供用于FPGA開發的免費Libero SoC IDE,僅在開發高端器件時才需要付費。
工業驅動系統
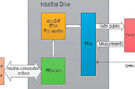
工業驅動系統由一個電機控制器件和一個通信器件構成,電機控制器件包含了驅動逆變器的邏輯和保護邏輯,通信器件則使監控控制能夠對運行時間參數進行初始化和修改。

圖1:典型工業驅動系統。
在典型的驅動系統(圖1)中,可能使用多個控制器器件來實現驅動邏輯。一個器件可能執行與電機控制算法相關的計算,第二個器件可能運行與通信相關的任務,第三個器件則可能運行與安全性相關的任務。
多軸電機控制
傳統上,工業電機控制應用使用微控制器或DSP來運行電機控制所需的復雜算法,在大多數傳統的工業驅動中,FPGA與微控制器或DSP一起使用,用于數據采集和快速作用保護。除了數據采集、PWM生成和保護邏輯,FPGA傳統上并未在實現電機控制算法方面發揮主要作用。
使用微控制器或DSP實現電機控制算法的方法并不容易擴展到多個以獨立速度運行的電機(多軸電機控制),美高森美SmartFusion2 SoC FPGA可以使用單一器件來實現集成且完整的多軸電機驅動控制(圖2)。

圖2:美高森美SmartFusion2 SoC FPGA使用單一器件來實現完整的多軸電機驅動控制。
控制方面可以分為兩個部分。一個部分用于運行磁場定向控制(FOC)算法、速度控制、電流控制、速度估計、位置估計和PWM生成;另一個部分則包括速度曲線、負載特性、過程控制和保護(故障和報警)。執行FOC算法屬于時間關鍵型,需要在極高的采樣速率下進行(在微秒范圍),特別是針對具有低定子電感的高速電機。這使得在FPGA中實現FOC算法變得更優越。過程控制、速度曲線和其他保護無需快速更新,因而能夠以較低的采樣速率執行(在毫秒范圍),并且能夠在內置Cortex-M3子系統中進行編程。
晶體管開關周期在驅動中發揮著重要的作用,如果FOC回路執行時間比開關周期短得多,硬件模塊可以重用于計算第二個電機的電壓。這意味著器件可以在相同的成本下提供更高的性能。
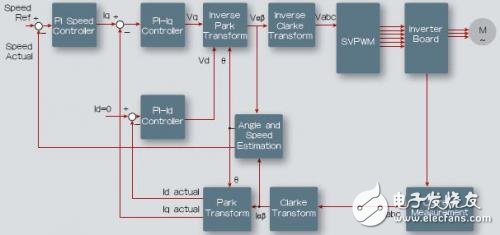
圖3:永磁同步電機的磁場定向控制(FOC)框圖。
(1)電機控制IP模塊。圖3為無傳感器磁場定向控制算法,這一部分將會討論這些模塊,它們作為IP核提供。
●PI控制器。比例積分(PI)控制器是用于控制系統參數的反饋機制,它具有兩個用于控制控制器動態響應的可調增益參數—比例和積分增益常數。PI控制器的比例分量是比例增益常數和誤差輸入的乘積,而積分分量是累積誤差和積分增益常數的乘積。這兩個分量被加在了一起。PI控制器的積分階段可能在系統中引起不穩定,因為數據值不受控制地增加。這種不受控制的數據上升稱作積分飽卷,所有的PI控制器實現方案都包括一個抗飽卷機制,用于確保控制器輸出是有限的。美高森美的PI控制器IP模塊使用hold-on-saturation(保持飽和)算法用于抗飽卷。這個模塊還提供附加特性以設置最初的輸出值。
●磁場定向控制(FOC)。FOC是通過獨立地確定和控制轉矩和磁化電流分量來為電機提供最優電流的算法。在永磁同步電機(PMSM)中,轉子已經磁化。因此,為電機提供的電流只用于轉矩。FOC是計算密集型算法,但是美高森美電機控制參考設計已經針對器件資源的最優使用而構建。FOC算法包括Clarke、Park、逆Clarke和逆Park變換。
●角度估計。FOC的一個輸入是轉子角度。精確確定轉子角度對于確保低功耗是必不可少的。增添確定位置和速度的物理傳感器會增加系統的成本并降低可靠性。無傳感器算法有助于消除傳感器,但是增加了計算復雜性。美高森美針對無傳感器控制提供了兩個角度計算算法IP模塊—一個基于Luenberger觀測器,另一個基于直接反電動勢計算。該公司還提供基于霍爾傳感器和編碼器的單獨參考設計。
●PLL.PLL用于同步信號,在多個應用中有用,例如逆變器的角度估計和電網同步。
●速率限制器。速率限制器模塊可以實現系統變量或輸入的平滑改變。例如,在電機控制系統中,如果電機所需的速度突然改變,系統可能變得不穩定。為了避免此類情形,速率限制器模塊用于從初始速度轉變到所需的速度。速率限制器模塊可以進行配置以控制改變的速率。
●空間矢量調制。空間矢量調制模塊改善了直流總線利用率,并消除了晶體管開關的短脈沖。因為晶體管開啟/關斷時間比脈沖持續時間長,短脈沖會導致不正確的開關行為。
●三相PWM生成。在所有計算的最后,可以得到三相電機電壓。這些電壓用于生成逆變器中晶體管的開關信號。PWM模塊為六個(三個高側和三個低側)晶體管產生開關信號,并且具有死區時間和延遲時間插入等先進特性。可編程的死區時間插入特性有助于避免逆變器引腳上的災難性短路情況。可編程的延遲時間插入特性使ADC測量與PWM信號生成能夠同步。該模塊可以配置成與僅由N-MOSFET組成的逆變器或同時包括N-MOSFET和P-MOSFET的逆變器一起工作。
(2)在SoC中調試FPGA設計。通常,在微控制器上調試設計比在FPGA上進行調試相對簡單一些。在SoC中,可以利用FPGA的高性能,同時保持在微控制器中更快速調試的優勢。美高森美SmartFusion2 SoC FPGA中的微控制器子系統和FPGA架構可以通過AMBA APB或AXI總線彼此進行通信。這樣可以把測試數據注入FPGA架構中,或者從FPGA架構中記錄調試數據,從而幫助實現運行時間的內部數據可視化,用于實時調試。固件代碼可以單步運行,在代碼中可以設置斷點來分析FPGA寄存器數據。
-
電機控制
+關注
關注
3540文章
1896瀏覽量
269259
發布評論請先 登錄
相關推薦
基于SoC FPGA進行工業設計及電機控制
一招教你設計SoC FPGA的工業和馬達控制?
通過FPGA提高工業應用靈活性的5種方法
工業設計是實現工業轉型升級的客觀條件
用于電機控制系統與設計(6)
SoC FPGA的電機控制IP模塊和經過驗證參考設計
如何設計基于SoC FPGA的工業和馬達控制方案?
如何利用SoC FPGA進行工業設計及電機控制?
如何利用SoC FPGA進行工業設計及電機控制?
控制算法與工業網絡的結合FPGA SoC加速馬達開發
基于ZYNQ SOC的電機控制及實例分析






 工商網監
工商網監
評論