 康謀分享 | AD/ADAS的性能概覽:在AD/ADAS的開發與驗證中“大海撈針”!
康謀分享 | AD/ADAS的性能概覽:在AD/ADAS的開發與驗證中“大海撈針”!
如果您希望從數百萬小時的駕駛數據中查找特定的相關駕駛事件和未遂事故,以確保您的所需功能正確運行,最好的方法就是創建一個系統性能的概覽分析,實現在數據日志中快速檢索關注點。為此,康謀在本文將為您詳細介紹IVEX的智能概覽功能,助力AD/ADAS的開發與驗證!
一、AD/ADAS性能概覽的重要性
為了開發、演進、測試和驗證自動駕駛(AD)功能或自動駕駛輔助系統(ADAS),各大企業都在生成數千小時的包含仿真或真實世界的駕駛數據日志。那么,如何才能知道自身的AD/ADAS系統是否始終按要求運行?是否朝著更好的表現發展?
對“脫離”AD/ADAS模式的情況進行分析是一種常見的方法。這有助于了解系統失敗的“原因”,而后可對表現不佳的地方進行分組,提供一個概覽以確定糾正這些失敗的優先順序。然而,“脫離”分析僅涵蓋“已知”的不當行為,對于邊緣/極端情況該如何處理?更重要的是,對于險些發生的事故如何處理?
例如,由于一個錯誤檢測或者說“幽靈檢測”,白色的自車認為它將與車輛1發生碰撞,因此決定執行變道操作,如圖1所示。幸運的是,由于自車的左車道是空的,該操作是可行的,否則就可能會由于自車的急剎車而導致與車輛4發生追尾事故。
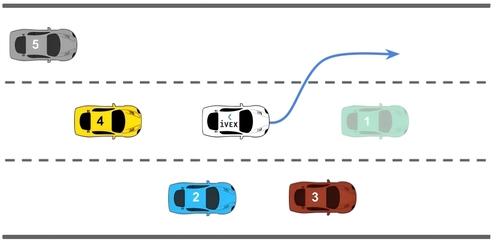

圖1 追尾未遂
這種更深入、更有成效的分析也與ISO 21448(SOTIF)所提出的過程相匹配,以識別在某些不利觸發條件下系統可能會表現出的局限性、弱點與干擾,而這些都可能導致事故或相關意外事件的發生。
如果能夠提供AD/ADAS系統性能的概覽,工程師就可以迅速在結構化分析中定位所有相關的事件或條件,例如:
(1)數據日志中出現了哪些未遂事故?
(2)系統在哪一個操作域(OD)表現不佳,原因是什么?
(3)開發是否正朝著更好的表現方向發展?
(4)是否應該修改功能需求,以便流暢且充分地與現實世界交互?
(5)功能是否滿足了指定的需求?
因此,為了開發和驗證AD/ADAS系統,需要有效地識別、分析并了解所有可能的未遂事故、性能不足或觸發條件,這些都對AD/ADAS系統構成了挑戰。然而,當前高度依賴人工的技術手段如同“海底撈針”,在數百萬小時的駕駛數據中幾乎難以發現目標。
二、康謀IVEX智能概覽
為了整理駕駛數據并找到那些重要的“針”,康謀IVEX通過使用特定的安全和關鍵績效指標(SPIs,KPIs),即根據采集/模擬駕駛數據匯總的“指標(metrics)”,以創建系統性能的最佳概覽。
1、利用指標整理駕駛數據
由于采集數據的非結構化特性和不斷變化的動態交通環境,整理駕駛數據存在巨大挑戰。我們設定了3個主要指標類型來整理數據:傳感器與感知指標、行為指標、舒適度指標。
第一層是傳感器與感知指標。它們是自動駕駛汽車與環境的初始接觸點,表示系統對周圍環境的感知程度,有助于在開發的早期階段突出性能不佳的情況,例如誤報對象檢測、車道線提取失敗等。
第二層指標關注AD/ADAS系統采取的控制和行為動作。例如,對于自動緊急制動(AEB)系統,需要檢查制動信號是否在正確的時間觸發,進而產生更好的減速。
第三層指標是指乘客可能體驗到的舒適度。例如,為了驗證自動車道保持輔助系統(ALKS),可以測量車輛產生的任何會給乘客帶來不適的擺動行為。
根據待測的AD/ADAS功能確定了哪些指標是感興趣的之后,就可以有效地開始整理數據。除了前面的例子,指標還可以是跟蹤感知物體尺寸、檢查檢測到的車輛邊界框是否分裂或合并、監測與其他交通元素的前后距離和橫向距離、預測潛在碰撞以及評估檢測到的車道標識質量。IVEX軟件也允許工程師通過簡單的編程API包含他們自己的定制指標。
2、創建合理且可觀的概覽
當使用選定的指標整理好記錄的駕駛數據后,如何在所有的數據中找到所需的“針”?在IVEX中,我們創建了一個優化的流程來高效處理所有駕駛數據日志。
我們匯總了所有的測量結果,提供了一個基于指標的清晰組織。此外,由于當前的L2+ ADAS系統受限于運行設計域(ODD),例如ALKS僅適用于車速低于60公里/小時的高速公路場景。我們根據ODD對分析進行切分,以便于簡化搜索空間。所有結果被匯總并呈現在一個簡潔、可定制的界面中,只需單擊三下即可“大海撈針”,詳細檢查特定的駕駛場景。
現在,我們可以觀察整理得到的數據結果,如下圖所示。這些結果是對所有數據日志的全面匯總,并以簡單但具有指導性的方式展示。每個指標的結果顯示在每一行上,而ODD則顯示在列中。在每個單元格內呈現的是相應指標與ODD組合的違規率。


圖2 聚合分析
舉個例子,假設我們正在分析城市環境中駕駛系統的舒適性:
在一次點擊中,我們選擇了“低速”ODD(小于15公里/小時)下的“急剎車”指標。
接下來,我們看到的是在所選擇的ODD內,所有分析的數據日志中施加的制動減速度分布情況。如果要求規定施加的制動減速度應小于4米/秒2,那么可以立即看到有0.06%的情況未能滿足這一要求。通過第二次點擊,就可以選擇特定的制動范圍(分布中的列)來分析特定的事件/情景。

圖3 智能概覽訪問特定記錄數據流程示意圖
而后,工程師就可以直接訪問確切時間戳的特定記錄數據,觀察完整情況并獲得有關問題的額外見解。
三、結論
本文案例中,IVEX可以從69小時的駕駛日志中準確篩選出會令乘客非常不舒適的特定急剎車事件(減速度超過4米/秒2),展示了一種非常簡單工作流程。除了能夠幫助工程師在幾秒鐘內從大量數據中找到相關事件,IVEX還提供可用于根據SOTIF和UL4600進行安全論證的報告。
簡而言之,IVEX可以助力于實現:
1、整理海量數據日志并從中識別特定事件
2、識別需要添加為SOTIF分析一部分的觸發條件
3、跟蹤AD/ADAS系統在不同迭代中的演變,以展示系統改進的論據,并為UL4600文檔提供具體的支持。
-
開發
+關注
關注
0文章
370瀏覽量
40917 -
數據處理
+關注
關注
0文章
613瀏覽量
28629 -
adas
+關注
關注
309文章
2193瀏覽量
208853 -
自動駕駛
+關注
關注
785文章
13930瀏覽量
167002 -
汽車
+關注
關注
13文章
3601瀏覽量
37653
發布評論請先 登錄
相關推薦
康謀分享 | 如何應對ADAS/AD海量數據處理挑戰?

康謀分享 | 確保AD/ADAS系統的安全:避免數據泛濫的關鍵!

使用FPGA構建ADAS系統簡易過程
康謀分享 | 直面AD/ADAS快速開發挑戰:IVEX自動駕駛場景管理及分析平臺!


康謀分享 | 在基于場景的AD/ADAS驗證過程中,識別挑戰性場景!

神經重建在自動駕駛模擬中的應用

千億高級駕駛輔助市場不可或缺的技術,是提升LiDAR和ADAS性能的關鍵!

英特爾開發套件『哪吒』在Java環境實現ADAS道路識別演示 | 開發者實戰

英特爾開發套件在Java環境實現ADAS道路識別演示

康謀分享 | aiSim5 物理相機傳感器模型驗證方法(一)






 工商網監
工商網監
評論