 抖動定義和測量
抖動定義和測量
引言:
時鐘抖動(jitter)是現代通信和數字系統中至關重要的性能指標之一,對數據傳輸速率和系統同步起著關鍵作用。本文將深入探討時鐘抖動的定義、不同類型,詳細介紹各種抖動類型的測試方法,并分析時鐘抖動對實際應用的危害。
1、時鐘抖動的定義:
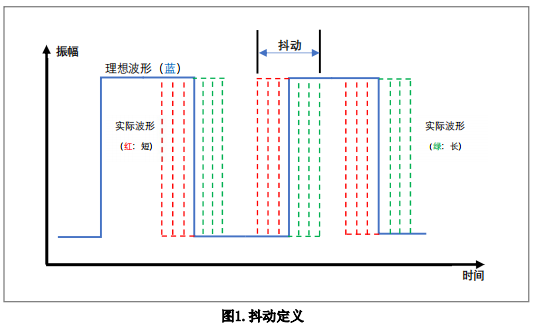
抖動的定義為“信號的定時事件與其理想位置之間的偏差”,時鐘抖動是指時鐘信號在時間上的偏差和波動。它通常以時間測量單位(如皮秒ps、飛秒fs)表示,用來描述時鐘信號頻率誤差、相位偏移和瞬時抖動等。
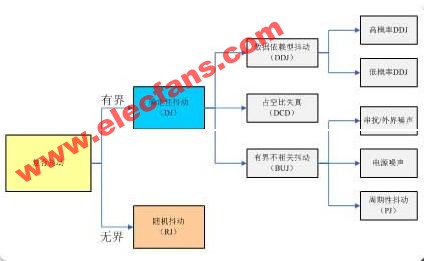
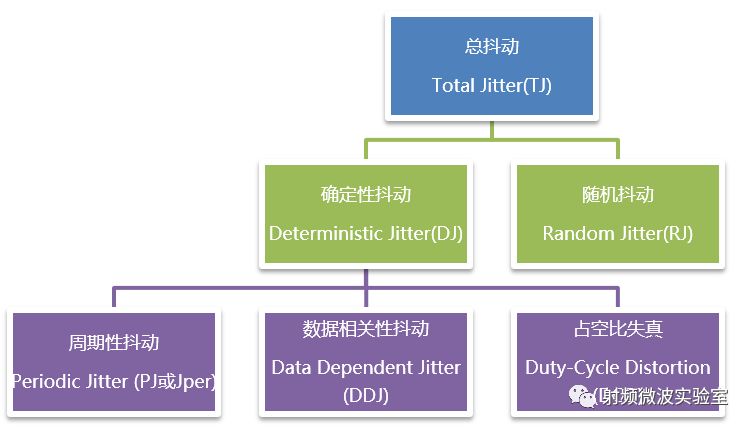
2、抖動類型
時鐘信號抖動定義有多種主要是:
周期抖動 (Period Jitter)
相鄰周期抖動 (Cycle to Cycle Period Jitter)
長期抖動 (Long Term Jitter)
相位抖動 (Phase Jitter)
時間間隔誤差 (Time Interval Error or TIE)
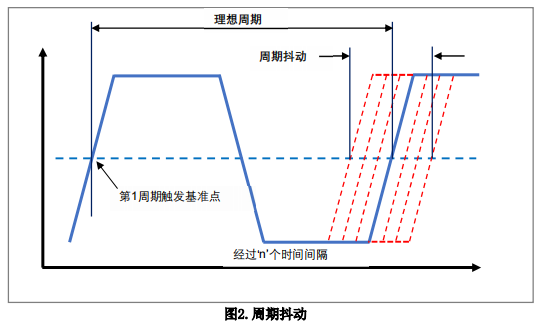
2.1 周期抖動
周期抖動是時鐘信號的周期時間相對于一定數量、隨機選定的理想時鐘信號周期的偏差。如果我們能對一定數量的時鐘周期進行測量,就可以計算出這一段時間測量窗口內的平均時鐘周期以及其標準偏差與峰峰值。我們通常將標準偏差和峰峰值分別稱作 RMS 值和 Pk-Pk周期抖動。
Peak to Peak Period Jitter = max(Tn) – min(Tn)
RMS Period Jitter = stdEV(Tn)
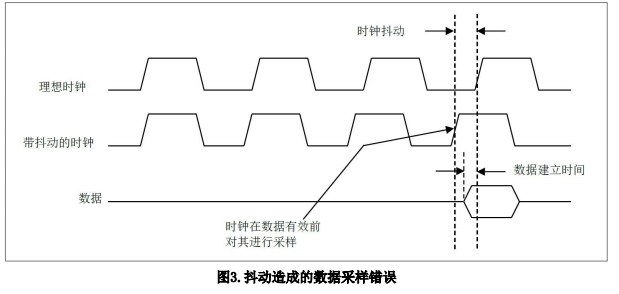
周期抖動在數字系統中的時序冗余度計算方面非常實用。例如,在一個基于微處理器的系
統中,處理器在時鐘上升之前需要 1 ns的數據建立時間。如果時鐘的周期抖動為 -2.0 ns,
則時鐘的上升沿可能發生在數據有效前,因而微處理器可能得到不正確的數據。
該實例如下圖所示。
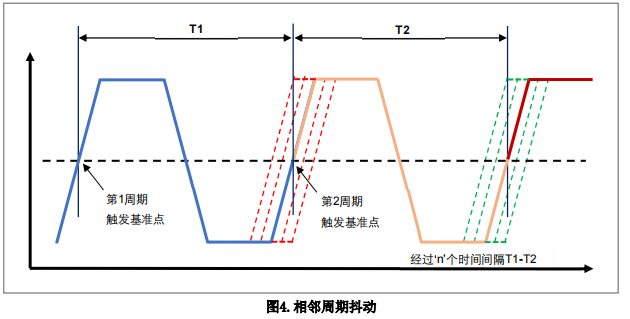
2.2 相鄰周期抖動
相鄰周期 (C2C) 抖動,根據 JEDEC 標準 65B,是通過一定數量的相鄰周期隨機樣本的計
算得出相鄰周期的時間變化。JEDEC 標準進一步規定:每個樣本的大小應大于或等于1,000。
值得注意的是,相鄰周期抖動僅涉及兩個連續周期之間的周期差,與理想周期無關。
相鄰周期抖動一般體現為以 ps 為單位的峰值,用于定義任意兩個連續時鐘上升沿之間的
最大偏差。此類型的抖動規范常用于體現擴頻時鐘的穩定性,因為周期抖動對頻率擴展特性
更加敏感,而相鄰周期抖動則不同。
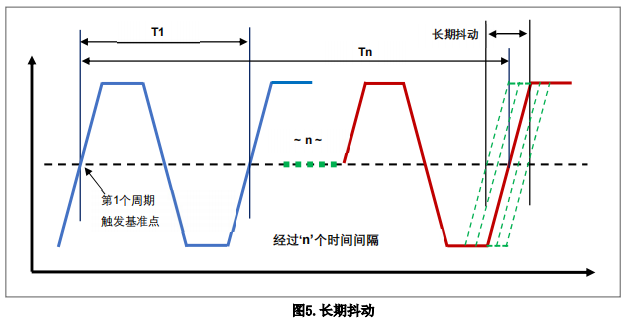
2.3 長期抖動
長期抖動測量的是在多個連續周期后時鐘信號邊沿與理想位置的變化。在實際測量中使用
的周期數量取決于不同的應用。長期抖動與周期抖動和相鄰周期抖動不同,因為其代表的是
抖動在長時間間隔期間連續時鐘周期流上的抖動累積效應。因此,長期抖動有時也被稱為累
積抖動。長期抖動通常對圖形/視頻顯示以及測距器等長范圍遙測應用非常實用。Long-Term
jitter 測量由參考點滯后相當數量的Cycle(500-1000)后時鐘沿的抖動值。該抖動參數也是
時鐘穩定性的一個非常重要的指標。
2.4 相位抖動
相位噪聲描述為某一給定頻率偏移處的dBc/Hz 值,也稱噪聲頻譜密度值(例如:在20KHz時為 -70 dBc/Hz,在 10MHz 時為 -105dBc/Hz),或是一段頻率偏移范圍內的連續曲線圖。相位抖動是一定頻率偏移范圍內相位噪聲的積分,以秒為單位表達。
在振蕩器輸出方波中,大部分能量均位于載波頻率上。但是,部分信號能量會“泄漏到”位于載波兩側附近的頻率上。相位抖動指的是相對于載波 (fc)的兩個偏移頻率之間包含的相位噪聲能量總量。
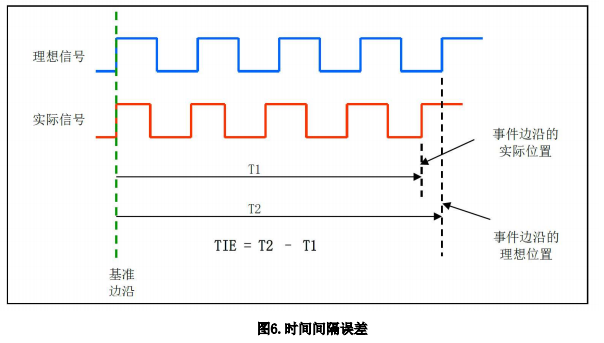
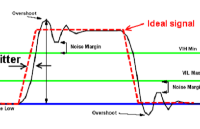
2.5 時間間隔誤差 (TIE)
時間間隔誤差 (TIE) 是指實際信號的事件邊沿時間點相對于理想信號的事件邊沿時間點的時間偏差。TIE 是相位噪聲頻譜在時域離散信號序列的表達,以秒或 ps 為單位。下圖是TIE的基本概念。
理想信號通常是信號處理軟件利用對實際信號周期的平均估算而得到的參考信號。
3、 抖動測試方法
3.1 測量周期抖動
1. 測量一個時鐘周期的時長(上升沿至上升沿)
2. 等待隨機數量的時鐘周期
3. 重復上述步驟 10,000 次
4. 根據這 10,000 個樣本計算平均值、標準偏差 (σ) 和峰峰值。
5. 重復上述測量 25 次。從這 25 個結果中計算平均峰峰值。
3.2 相鄰周期抖動測量方法
1. 測量兩個相鄰時鐘周期 T1 和 T2 的周期時間;
2. 計算 T1-T2 的值。記錄這一數值的絕對值;
3. 等待隨機數量的時鐘周期;
4. 重復上述步驟 1,000 次;
5. 計算這 1,000 個樣本的標準偏差 (σ) 和峰值。峰值是數據中的最大絕對值;
6. 重復上述測量 25 次,并從這 25 組結果中計算出平均峰值。
3.3 長期抖動測試方法
1. 測量 10,000 個連續時鐘周期的時間間隔;
2. 等待隨機數量的時鐘周期;
3. 重復上述步驟 1,000 次;
4. 根據這 1,000 個樣本計算平均值、標準偏差 (σ) 以及峰峰值。
-
測量
+關注
關注
10文章
4938瀏覽量
111812 -
時鐘信號
+關注
關注
4文章
453瀏覽量
28664 -
周期抖動
+關注
關注
0文章
4瀏覽量
6074
發布評論請先 登錄
相關推薦
時鐘抖動和相噪及其測量方法
抖動的知識及測量方法
測量時鐘緩沖器的附加抖動
如何測量附加抖動
示波器測量之抖動的四個維度

觸發抖動測量的演進
關于示波器設置的抖動完美測量
信號抖動的分類與測量

示波器測量之抖動的四個維度
簡單理解抖動Jitter測量





 工商網監
工商網監
評論