 京準科技:PTP網絡時鐘服務器過5跳交換數據測試
京準科技:PTP網絡時鐘服務器過5跳交換數據測試
京準科技:PTP網絡時鐘服務器過5跳交換數據測試
京準電子官微——ahjzsz
一、IEEE1588PTPv2授時技術簡介
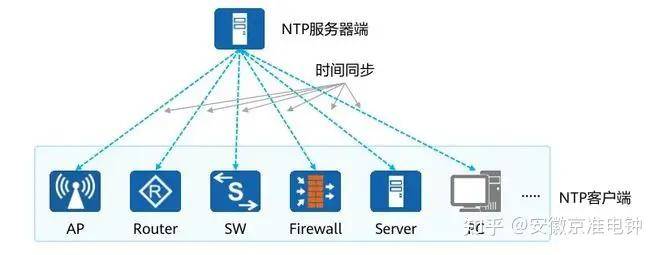
IEEE1588協議的全稱是“網絡測量和控制系統的精密時鐘同步協議標準”,是通用的提升網絡系統定時同步能力的規范,是一個允許通信網絡中的多個節點通過時鐘報文的傳播,從而達到與連在同一個網絡中的主時鐘參考達到精確同步的協議, 其特點為 :一個與介質無關 的協議,可實現有 線,無線,以太網, IP網,光網絡的節點時鐘同步。
IEEE1588的基本構思是通過硬件和軟件將網絡設備(客戶機)的內時鐘與一個主時鐘實 現精確時間同 步,目標 同步誤差為微妙(μs) 級別的運用 ,與 NTP協議的 1000μs精度相比,整個網絡的定時同步指標有顯著的改善。
IEEE1588協議目前已發展到 v2版本。1588v2對 v1進行了完善,進一步提高了同步的精度;引入透明時鐘 TC模式,包括 E2E透明時鐘和 P2P透明時鐘,計算中間網絡設備引入的駐留時間,從而實現主從間精確時間同步,并新增端口間延時測量機制等,通過非對稱校正減少了大型網絡拓撲中的積聚錯誤。
在良好的網絡環境下,IEEE1588v2能達到 100納秒(ns)的時鐘同步精度。
IEEE1588v2的高精 度使得它被越來 越多地用作 普通時鐘通過 網絡遠程實現 對高精度時鐘的頻率和相位鎖定的協議。
相對于現有的授時技術(如原子鐘, GPS, 北斗或 IRIG),IEEE1588v2授時系統的優點是:
o 不受地形限制:
1588v2時鐘同步網絡中只要保障時間源 (主時鐘) 的設置不受地形影響,各從時鐘 通過網絡鎖定主時鐘,不受其所處的地形/位置或者衛星可見度的影響。
o 成本低:
只需要一個高精度的主時鐘,以及連接在各個設備/終端的低成本從時鐘,即可實現對整個網絡的精確時鐘同步。
o 覆蓋面廣:
整個IEEE1588v2精確時鐘分布網絡的覆蓋面可以隨著其承載網絡的擴展而擴展。通過一個 2層或 3層網絡,一個主時鐘理論上可以同步上千個從時鐘。
o 綜合成本低:
可重用現有的廣域(IP)或局域網絡 (Ethernet)作為承載, 大大降低了網絡建設成本,并縮短了系統實施周期。
二、IEEE1588PTPv2的工作原理
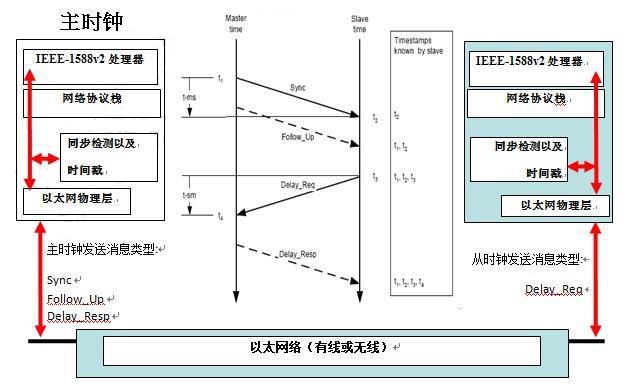
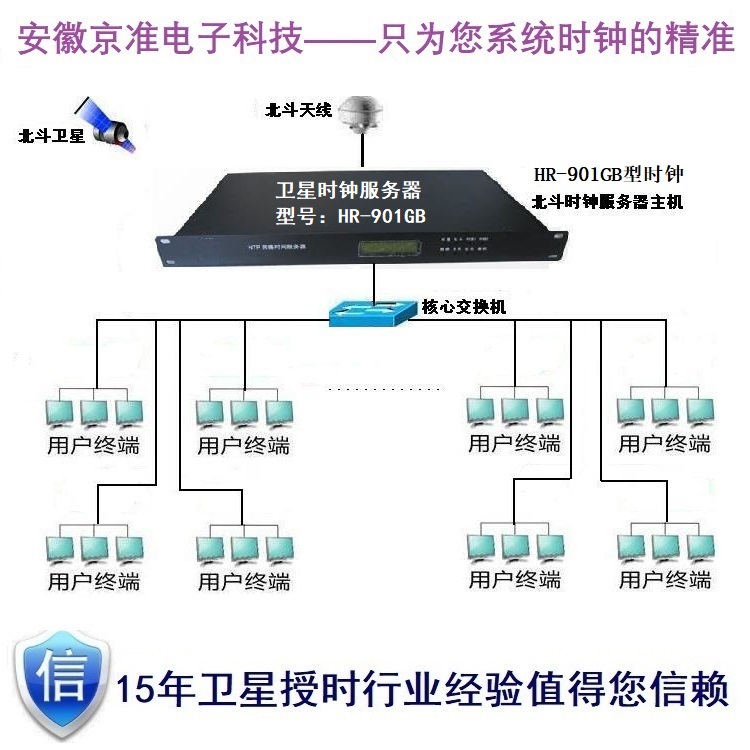
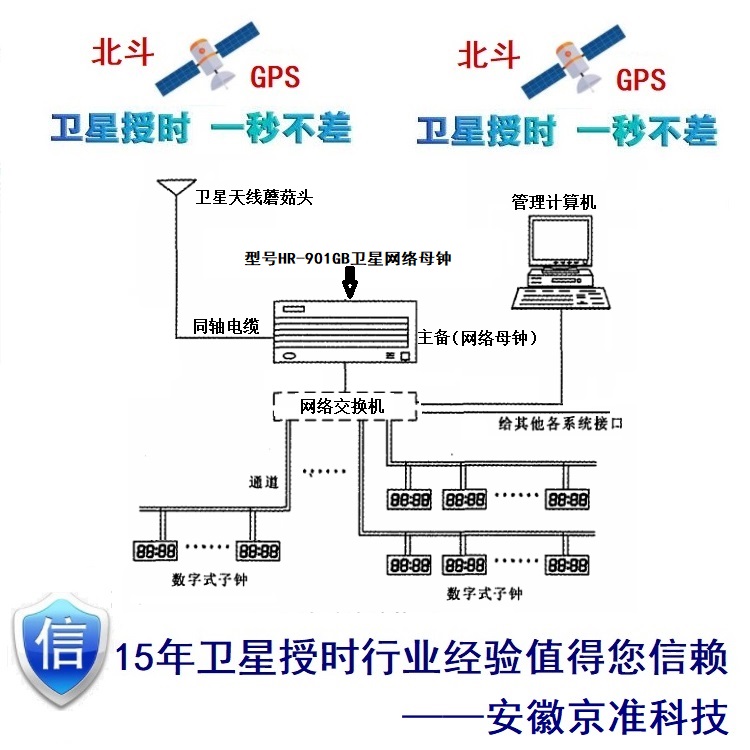
圖一中展示了一個從時鐘基于 IEEE1588v2通過網絡鎖定高精度主時鐘的原理:這個時鐘同步網絡包括一個支持 IEEE1588v2協議的高精度主時鐘,一個或多個精度較低的從時鐘,以及連接這兩個時鐘以太網或 IP網絡。 主時鐘與從時鐘按1588v2 規定的流程進行頻繁的消息交換.為了讓從時鐘測量出相對 主時鐘的時間漂移,主從時間之間信息交互的流程如下:
1) 主時鐘發送一個 Sync 消息到從時鐘并通過一個高精度的時間戳記錄下
了這個消息的發送時刻 t1。
2) 從時鐘收到Sync消息之后紀錄下接收時間戳 t2.
3) 主時鐘接著將時間戳 t1放在一個Follow_Up消息中并傳給從時鐘。
4) 從時鐘接受Follow_Up 消息
5) 從時鐘發送一個 Delay_Req 消息到主時鐘,并利用一個高精度時間戳記錄
下發送時間 t3
6) 主時鐘接收 Delay_Req 消息 并記下接收時間 t4.
7) 主時鐘將時間戳t4 放在一個 Delay_Resp 消息中傳給從時鐘。
主時鐘為每一個從時鐘的消息交互分別一個會話。以上消息交互過程在主從時鐘
之間進行周期性的重復,幫助從時鐘維護對主時鐘的時間同步并不斷的嘗試提高精度。
在上述消息交互之后,從時鐘將 得到t1 – t4四個相關的時間 戳.這些時間戳將被用來 計算從主 從時鐘間 的平均消息 傳輸時間 以及從時 鐘相對于主 時鐘的時間漂移。從時間戳 t1– t4計算出主從時鐘間的平均消息傳輸時間以及時間漂移過程如下:
t2-t1= Clock_Offset+ T_MS (1)
t4-t3= - Clock_Offset+ T_SM (2)
其中:
Clock_Offset 代表從時鐘相對于主時鐘的時間誤差
T_MS 代表主時鐘往從時鐘的傳輸路徑時延
T_SM 代表從時鐘往主時鐘的傳輸路徑時延
如果主從時鐘間上下行傳輸路徑時延對稱,即 T_MS = T_SM , 主從時間誤差可估算為:
Clock_Offset = [(t2-t1)-(t4-t3)]/2 (3)
上行或下行傳輸路徑時延按下式估算:
T_MS = T_SM = [(t2-t1)+(t4-t3)]/2 (4)
如果主從時鐘間上下行傳輸路徑時延是非對稱的,按上述方法估算的主從時間漂移以及傳輸路徑時延將會存在誤差. 假設原本對稱的上下行傳 輸時延現分別存在記為 e_ms, e_sm的時延修正變量 (通常為正數)。表達式(1)和 (2)可改寫為:
t2-t1= Clock_Offset + T_MS + e_ms (5)
t4-t3= - Clock_Offset + T_SM + e_sm (6)
主從時間漂移可估算成:
Clock_Offset = [(t2-t1)-(t4-t3)]/2– (e_ms-e_sm)/2 (7)
上或下行傳輸路徑時延按下式估算:
T_MS = T_SM = [(t2-t1)+(t4-t3)]/2 + (e_ms+e_sm)/2 (8)
由(7)式可以看出,影響 IEEE1588v2時鐘同步方法的精度的主要因素并不是上行或下行傳輸時延的誤差(或修正變量)的絕對值,而是上下行傳輸時延誤差間的相對值。或者說在一個傳輸時延誤差很大的環境里,只要保證上下行傳輸時延誤差對稱,IEEE1588v2時鐘同步仍然可以達到一個很高的精度。
從時鐘可以根據估算得到的本地時鐘相對于主時鐘的時間漂移對本地時鐘進行校正,從而達到主從時鐘同步.為了使從時鐘的時間同步達到很 高的精度,從時鐘的 IEEE1588v2同步算法必須對上下行的傳輸時延差別,抖動以及其它可能引入誤差的因素進行補償。
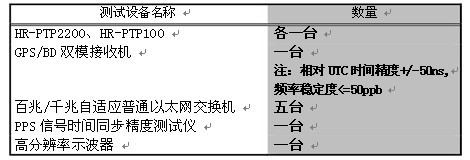
測試設備
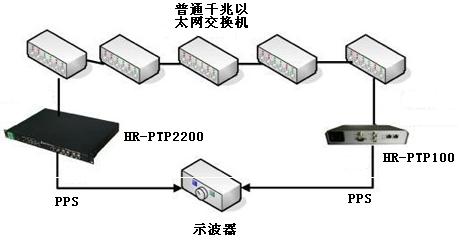
我們搭建了一個千兆(普通交換機)以太網以進行我司 PTP時鐘產品的功能,同步精度的測試。該網絡的的基本拓撲框圖如下圖所示 (以五跳局域網為例 )。
測試方案實施
具體測試方案實施包括以下要點:
§ 測試網絡拓撲:
場景:千兆以太網絡,鏈式拓撲, 5跳。
§ 測量設備: 高分辨率的示波器。
§ 測試設備: HR-PTP2200設備(0722 版本)做主時鐘,HR-PTP100設備作為從時鐘,5個千兆思科交換機,示波器。
§ 配置參數:組播,E2E,一步,UDP,sync為-3,announce為 0,delay_req為-3。
§ 測試內容:HR-PTP2200做主(接 GPS 天線一段時間后拔掉),HR-PTP100做從,過 5跳交換機,不加流量,使用示波器查看主從 PPS偏差。
§ 測試結果統計方法:系統穩定后觀察 1個小時。
測試結果
五跳,鏈式拓撲,以太網絡中主從時鐘同步精度測試示意圖:
測試結果:測試時間 1小時,主從對時偏差為(-240,50)ns;
審核編輯 黃宇
-
服務器
+關注
關注
12文章
9304瀏覽量
86062 -
IEEE1588
+關注
關注
1文章
19瀏覽量
16440 -
網絡時鐘
+關注
關注
0文章
11瀏覽量
6836 -
PTP
+關注
關注
0文章
66瀏覽量
8695
發布評論請先 登錄
相關推薦










 工商網監
工商網監
評論