") UWB定位技術(shù)是什么?UWB定位技術(shù)的工作原理詳解
UWB定位技術(shù)是什么?UWB定位技術(shù)的工作原理詳解
經(jīng)過上次的介紹,我們可以看到UWB定位技術(shù)在室內(nèi)定位領(lǐng)域發(fā)揮的革新作用!在信息社會(huì),萬物的位置信息發(fā)揮著至關(guān)重要的作用:廠房?jī)?nèi)每件產(chǎn)品的擺放位置、安保現(xiàn)場(chǎng)每個(gè)安保人員的位置、物流倉庫里每一件產(chǎn)品的位置。。。在這個(gè)萬物互聯(lián)的時(shí)代,定位已經(jīng)成了信息社會(huì)運(yùn)轉(zhuǎn)的核心要素。
GPS、北斗在室外定位方面已經(jīng)非常成熟;在室內(nèi)定位領(lǐng)域,UWB又是依據(jù)何種原理實(shí)現(xiàn)精確的室內(nèi)定位呢?
本節(jié)小編帶你解開UWB定位技術(shù)的神秘面紗。
UWB到 底是什么 ?
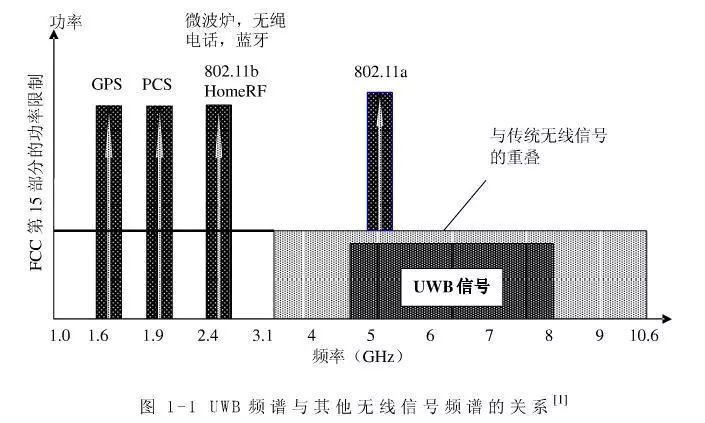
超寬帶無線通信技術(shù)(UWB)是一種無載波通信技術(shù),UWB不使用載波,而是使用短的能量脈沖序列,并通過正交頻分調(diào)制或直接排序?qū)⒚}沖擴(kuò)展到一個(gè)頻率范圍內(nèi)。UWB的主要特點(diǎn)是傳輸速率高、空間容量大、成本低、功耗低等,必將成為解決企業(yè)、家庭、公共場(chǎng)所等高速因特網(wǎng)接入的需求與越來越擁擠的頻率資源分配之間的矛盾的技術(shù)手段。
UWB的基本測(cè)距原理是什么?
在說明這個(gè)問題之前,我們很有必要說說UWB測(cè)距的基本原理。
TOF(Time Of Flight飛行時(shí)間測(cè)距法)主要利用信號(hào)在兩個(gè)異步收發(fā)機(jī)(Transceiver)之間飛行時(shí)間來測(cè)量節(jié)點(diǎn)間的距離。雙向飛行時(shí)間法(TW-TOF,two way-time of flight)每個(gè)模塊從啟動(dòng)開始即會(huì)生成一條獨(dú) 立的時(shí)間戳 。模塊A的發(fā)射機(jī)在其時(shí)間戳上的Ta1發(fā)射請(qǐng)求性質(zhì)的脈沖信號(hào),模塊B在Tb2時(shí)刻發(fā)射一個(gè)響應(yīng)性質(zhì)的信號(hào),被模塊A在自己的時(shí)間戳Ta2時(shí)刻接收。有次可以計(jì)算出脈沖信號(hào)在兩個(gè)模塊之間的飛行時(shí)間,從而確定飛行距離S。
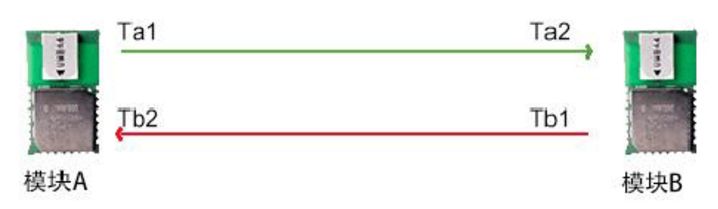
距離:S=Cx[(Ta2-Ta1)-(Tb2-Tb1)](C為光速)。
但是單純的TOF算法有一個(gè)比較嚴(yán)格的約束:發(fā)送設(shè)備和接收設(shè)備必須始終同步。這是一個(gè)比較棘手的問題,但是一種Double-sided Two-way Ranging的算法巧妙的避開了這個(gè)問題,它即利用了TOF測(cè)距的優(yōu)良特點(diǎn),同時(shí)又極大的去除了TOF的同步問題,從而為TOF的實(shí)用化掃清了道路。
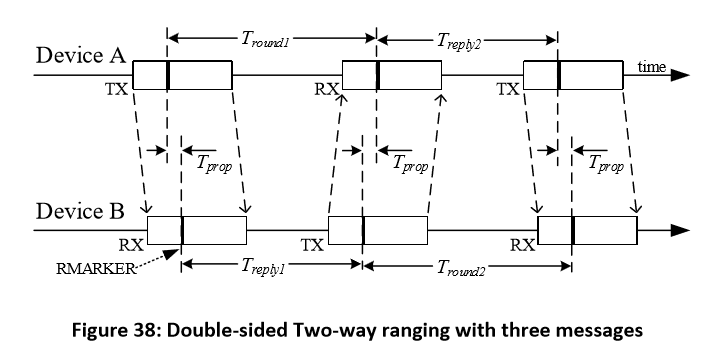

上面就是Double-sided Two-way Ranging算法的實(shí)際模型和計(jì)算飛行時(shí)間的公式,可以看到它在計(jì)算飛行時(shí)間時(shí)僅僅需要分別來自上面和下面定位設(shè)備的時(shí)間信息,而不需要兩部設(shè)備時(shí)間同步。
03
UWB的定位原理是什么?
定位算法中比較成熟的有:TOA(到達(dá)時(shí)間)、TDOA(到達(dá)時(shí)間差)、AOA(到達(dá)角度或稱為DOA估計(jì))定位技術(shù)和這三種技術(shù)的混合技術(shù)。
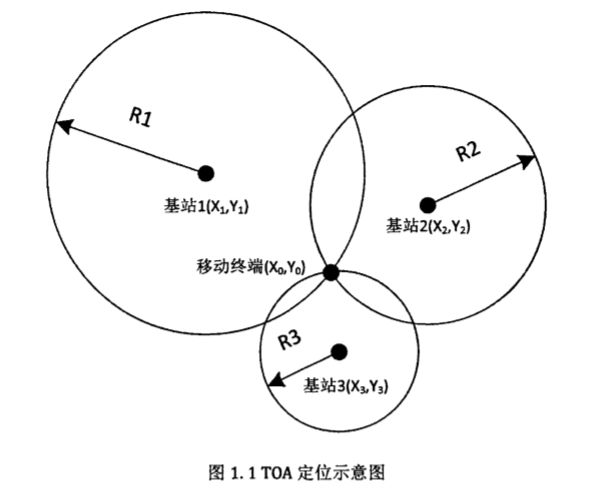
TOA通過分別測(cè)量移動(dòng)終端與三個(gè)或更多基站之間信號(hào)的傳播時(shí)間來定位。它采用了圓周定位,
假如己知移動(dòng)終端到基站i的直線距離尺Ri, 那么由幾何原理可知,移動(dòng)終端的位置一定在以基站i的位置為圓心,Ri為半徑 的圓周上。即若移動(dòng)終端的位置(X0,Y0),基站位置為(Xi,Yi),則兩者滿足如下 關(guān)系:

下面的圖非常形象的詮釋了TOA算法的原理:
然而事情都具有兩面性:TOA定位對(duì)傳播中產(chǎn)生的誤差比較敏感,這些誤差來自于傳播中的反射、 多徑傳播、非視距傳播和噪聲等干擾,會(huì)造成各圓無法相交或相交處不是一個(gè)點(diǎn)而是一個(gè)區(qū)域。同時(shí)TOA定位要求移動(dòng)終端和基站之間在時(shí)間上要準(zhǔn)確同步,1ns的同步誤差將會(huì)給定位帶來大約0.3米的不確定性。納秒級(jí)的同步精度在 許多通信系統(tǒng)中是達(dá)不到的。因此,實(shí)際中很少使用單純的TOA定位。
正因?yàn)槿绱耍琓DOA對(duì)TOA技術(shù)加以了改進(jìn)。
TDOA定位不必要進(jìn)行基站和移動(dòng)終端之間的同步,而只需要基站之間進(jìn)行同步。因?yàn)榛镜奈恢檬枪潭ǖ模局g進(jìn)行同步與基站和移動(dòng)終端之間進(jìn)行同步要容易實(shí)現(xiàn)得多。這使得TDOA定位比TOA定位要更加容易實(shí)現(xiàn),所以 TDOA定位的應(yīng)用非常廣泛。
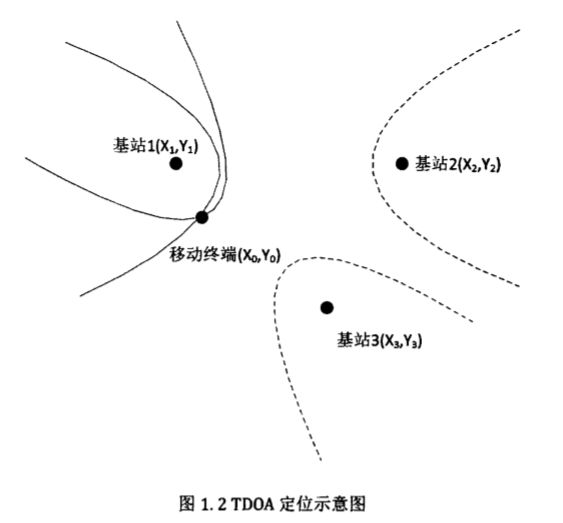
它通過測(cè)量出兩個(gè)不同基站與移動(dòng)終端的傳輸時(shí)延差來進(jìn)行定位。假設(shè)移動(dòng)終端的位置與基站1和基站2的距離差為R21=R2-R1,則移動(dòng)終端的位置必定在以兩個(gè)基站為焦點(diǎn),與兩個(gè)焦點(diǎn)的距離差恒為R21的雙曲線上。即若移動(dòng)終端的位置為(X0,Y0),基站1位置為(X1,Y1),基站2位置為(X2,Y2),則它們滿足關(guān)系:

再通過另一組移動(dòng)終端與基站1基站3或基站2基站3的TDOA,可以得到 另一組雙曲線,兩組雙曲線將最多產(chǎn)生兩個(gè)交點(diǎn),再根據(jù)先驗(yàn)知識(shí)(如半徑范圍 等)判斷出移動(dòng)終端的位置。
它的基本原理可以從下面的圖得到良好的詮釋:
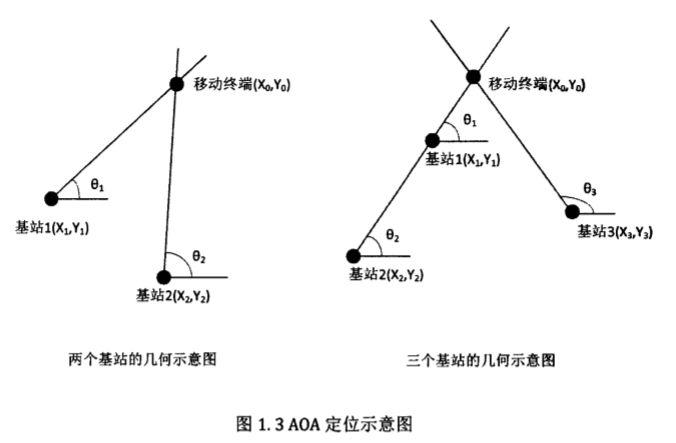
AOA估計(jì)也叫DOA(Direction ofArrival)估計(jì)或者方向識(shí)別DF(DirectionFinding)。
AOA的優(yōu)點(diǎn)是所需要的基站比較少,最少只要兩個(gè)基站就可以進(jìn)行定位。在LTE系統(tǒng)之前,由于以前的基站并沒有天線陣列,而只為了進(jìn)行定位而對(duì)基 站進(jìn)行更換,不僅需要投入龐大的資金也會(huì)破壞原有系統(tǒng)的結(jié)構(gòu)和工作模式,使通信系統(tǒng)無法正常工作,因此AOA定位并不受人重視。在LTE系統(tǒng)中應(yīng)用了 OFDM和多天線陣技術(shù),使得基于LTE的AOA定位成為了研究熱點(diǎn)。AOA的缺點(diǎn)是當(dāng)移動(dòng)終端和基站的距離比較遠(yuǎn)的時(shí)候,即使有微小的定位角度的誤差,都會(huì)造成比較大的定位距離的偏差。因此AOA定位多見于中、短距離的定位。
下圖很好的詮釋了AOA的基本原理:
混合定位技術(shù)就是混合使用上述的兩種或三種定位技術(shù),比如TOA-TDOA、 TOA-AOA、TDOA-AOA等,通過檢測(cè)并提取相關(guān)的定位參數(shù),用于定位解算。混合定位技術(shù)可以運(yùn)用多種定位參數(shù)實(shí)現(xiàn)定位,綜合不同定位技術(shù)的特點(diǎn),在各 種定位技術(shù)的特性中取長(zhǎng)補(bǔ)短,讓最終的定位性能得到優(yōu)化。
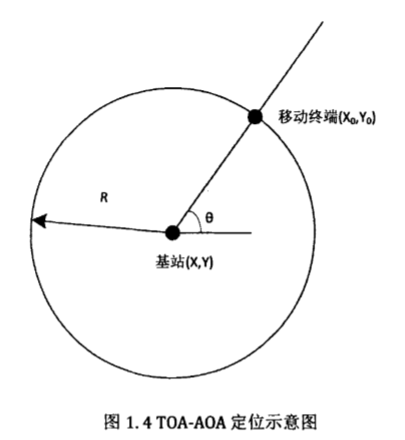
對(duì)于基于TOA-AOA的技術(shù),又叫圓角定位,利用這種方法可以實(shí)現(xiàn)利用單個(gè)基站進(jìn)行定位。首先利用TOA的值計(jì)算出移動(dòng)終端和基站之間的距離R,那么可以確定用終端的位置在以基站為圓心,R為半徑的圓周上。接著利用天線陣 列測(cè)量出的移動(dòng)終端到基站的AOA,作出一條射線。則射線與圓之間的交點(diǎn)就是移動(dòng)終端的位置。若移動(dòng)終端的位置為(X0,Y0),基站位置為(X,Y)在基站測(cè)得的移動(dòng)終端發(fā)出的信號(hào)的到達(dá)角度為θ,基站和移動(dòng)終端的距離為R,則他們滿足如下方程:

我們可以通過下圖形象地體會(huì)定位過程:
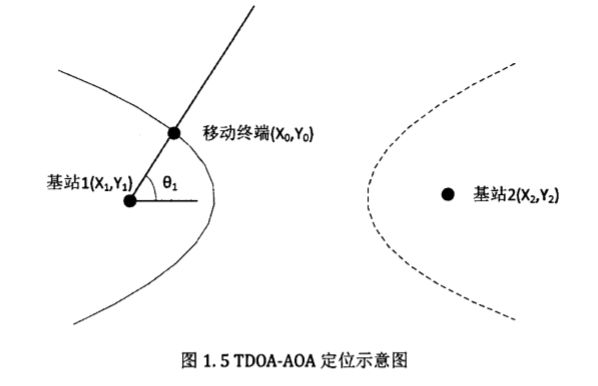
對(duì)于TDOA-AOA定位,可以通過下圖形象的理解其定位原理:
目前,混合定位技術(shù)是UWB定位研究領(lǐng)域中的新趨勢(shì),具有廣大的發(fā)展前景。
-
UWB
+關(guān)注
關(guān)注
32文章
1110瀏覽量
61387
原文標(biāo)題:UWB技術(shù)詳解
文章出處:【微信號(hào):RFCircle,微信公眾號(hào):射頻圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論