 自動駕駛的無線鏈路技術揭秘
自動駕駛的無線鏈路技術揭秘
自主駕駛車輛無線電鏈路一直在發展變化。 諸如5.9 GHz 專用短程通信技術(DSRC) 之類規范,起初作為收費站的車輛至基礎設施(V2I) 系統規范,后來轉而運用于其它基礎設施應用,如提供限速信息,以使攝像頭無需探測道路標記。
然而,由于全球的頻段分布已經發生了變化,且V2I 基礎設施尚未廣泛分布,因此限制了自主操作的無線電技術的使用。 通過提供限速數據和其它有用信息,來自路邊裝置(RSU) 的數據能協助自主控制系統,這些信息如附近車輛的位置、速度和行駛方向,抑或是通過其它方式看不到的位于拐角的車輛。 但這些數據并不能總由RSU 提供,所以,車輛在無法提供這些數據的路上行駛時,必須配備攝像頭等其它檢測系統。 這就意味著增加開發成本和復雜性。
所以直到最近,在無線鏈路方面的要求才被視為自主駕駛車輛運行的一個基本要素。 盡管最初的開發重點關注自主控制系統,但近來更多的設計則認可需要采用無線鏈路來適應大量不同的應用。
這包括各種不同的應用,從下載最新地圖數據讓車輛知道確切的含義,到從其它車輛接收交通信息。無線鏈路也可用于“列隊行駛”,讓車輛,尤其是卡車之間保持恒定車距。
圖1:通用汽車是率先使用車輛間數字近程通信鏈路的汽車制造商之一,從2016 年底開始便在其凱迪拉克CTS 上使用該技術。
雖然多家汽車制造商已采用DSCR 技術,如通用汽車在其2016 年底發布的凱迪拉克CTS 上采用了該技術,但LTE 蜂窩技術也在作為一種可能的無線連接技術處于檢測階段。
不過,LTE 網絡的延遲仍是一個問題,對于V2V 應用時尤為嚴重。 來自車輛的數據從LTE 模塊流向基站,再通過運營商網絡流回車輛附近的相同基站。DSRC 數據則直接在車輛間流動。

圖2:自主駕駛車輛無線鏈路的DSRC 和蜂窩技術的不同用途(感謝NXP 提供資料)
因此,與之相反,基于LTE 的信息娛樂子系統用于向無人駕駛車輛的乘員提供信息娛樂服務,而基于DSCR 的V2X 子系統則用于提供安全數據。 信息娛樂子系統按價而定,而V2X 則要依據一定的標準將加密技術、更低的延遲和可靠性作為關鍵特性。
例如,沃爾沃曾使三輛卡車列隊橫跨歐洲,在此期間使用802.11p 無線技術在首車與其它兩輛車之間進行直接通信。 通信系統與基于雷達的自適應巡航控制系統直接連接,使相鄰兩車之間保持1 秒的車距。 這樣即可讓這些車輛自主駕駛。
IEEE 802.11p 標準采用5.9 GHz 頻段(5.850-5.925 GHz) 中的75 MHz 帶寬信道,而DRSC 則使用5.725 MHz 至5.875 MHz 頻段。 兩者均使用802.11a Wi-Fi 一半的帶寬或者雙倍傳輸時間,以使接收器能更可靠地處理由其它車輛或房屋反射的回波信號。
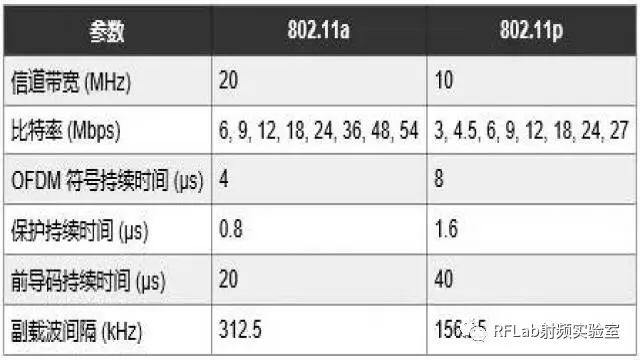
圖3:802.11a 和802.11p 標準的不同之處(感謝MathWorks 提供資料)
盡管802.11p 是DSRC 的基本協議標準,但目前在歐洲還未實現完全兼容。 所以,為能確保在全歐洲范圍內的互操作性,進行標準化是根本要求。
DSRC 技術由現有的Wi-Fi 802.11ac 技術發展而來,具體器件如Cypress BCM89359。 該器件是首款Wi-Fi/智能藍牙2X2 MIMO 組合芯片,支持實時同步雙頻段(RSDB),也是一個獨立的三模智能藍牙(4.2 版)片上系統(SoC)。 該器件經過優化,可滿足汽車行業的各種嚴格標準,并通過了AECQ100 汽車環境應力要求測試,此外還支持完全生產零件批準程序。
這款SoC 設計用于與Apple CarPlay 和Google Auto Link 一起使用,具有多頻段同步汽車信息娛樂和車載信息系統運行功能,在2 x 2 MIMO 架構中使用兩組天線,以獲得更高的鏈路性能。
為實現可靠鏈路,802.11p 無線器件還將需要一個前端。
如果工程師正為某個設計項目部署Wi-Fi 連接,則應關注一下Skyworks 的SE5503A,這是一款完整的802.11a/b/g/n WLAN RF 前端模塊,具備功率放大器、濾波、功率檢測器、T/R 開關、多路復用器和相關匹配功能等全部功能。

圖4:Skyworks SE5503 為5 GHz DSRC 數據鏈提供了所有前端元件
SE5503A 外形超緊湊,是一個完整的、能覆蓋從收發器輸出到天線的2.4GHz 和5GHz WLAN RF 解決方案。 所有RF 端口均匹配50 Ω 電阻,從而簡化了PCB 布局和收發器的RFIC 接口。SE5503A 還包括一個用于發射器功率檢測器,且每個發射鏈的動態范圍均為20 dB。 每個功率放大器都具有獨立的數字使能控制功能,可用于發射器的開/關控制。 功率斜坡上升/下降時間小于0.7 μs,且在每個2.4 GHz 和5 GHz 功率放大器的輸入之前分別提供一個3.260-3.267 GHz 的和一個3.28-3.89 GHz 的陷波濾波器。 這些器件用來消除諧波干擾。
這一功能可用于提高接收器靈敏度和發射器性能,從而消除任何延遲問題并擴大覆蓋范圍。 如果車輛從很遠處的另一輛車獲取數據,那么在做出是否減速還是剎車等關鍵決定時,就需要更長的時間。 這一功能也可用于管理交通,通過使路上行駛的所有自主駕駛車輛緩慢減速,來緩解或消除走走停停的路況。
加密
為無線鏈路進行加密得到了越來越多的認可,但目前在實現中有多種不同的架構可選。 對無線鏈路進行保護可避免數據欺騙,也就是說,可以避免黑客向車輛發送虛假數據,例如讓車輛確信發生了事故且必須停車的虛假數據。LTE 系統從基站開始便已經過加密,并由接收器進行解密。
是否在DSRC 系統實現中進行加密,對系統開發者來說是一個關鍵問題。 經過加密的數據包可在DSRC 接收器中解密,或者發送至中央控制器。 在接收器端解密會占用更多的處理能力,因為要在一秒內處理數百萬個數據包且仍要保持低延遲。 這樣的優勢在于,數據包然后可以從接收器分配至不同的位置,例如將地圖更新信息直接發送至地圖子系統。
也可將數據包發送至中央處理單元進行解密、評估和分配。 這樣,由于加密和未加密數據在同一網絡中流動,可能會在數據I/O 中以及總線連接上產生一個瓶頸。 那么就需要增加一個優先級,但這將顯著增加系統架構的復雜性。
另一種方法就是,識別出需要立即解密的高優先級別的數據包,而時效性不太重要的數據包則延遲解碼。 不過,這是一個系統軟件方面的問題。
結論
在自主駕駛車輛上使用802.11p 無線標準基于已成熟的5 GHz Wi-Fi 和射頻前端設計。 能夠向附近的其它車輛和路邊裝置提供低延遲射頻連接,讓我們有大量機會來提升無人駕駛車輛的安全性。 來自其它車輛和路邊網絡的數據可以及時高效地提供關鍵數據,從而提供更多的安全數據來支持其它傳感器。LTE 可用于一些數據應用,而開發人員關注的是,在下一代5G 無線網絡中整合LTE 和Wi-Fi 低延遲技術,該網絡將從2020 年起在自主駕駛車輛中投入實際使用。
盡管這是一種成熟的技術,但仍在評估設計選項,尤其在安全方面。 確保所有在車輛和RSU 之間流動的數據安全可靠是至關重要的,因為它會很大程度上影響電子控制單元的設計和開發、車載控制器和網絡在功耗和性能方面的要求。 目前這些問題正在評估和解決當中,對于將在2018 年至2020 年時間段內發布的自主駕駛車輛相信一定會有所突破。
-
無線鏈路
+關注
關注
0文章
20瀏覽量
10959 -
自動駕駛
+關注
關注
785文章
13932瀏覽量
167009
原文標題:無人駕駛汽車的無線射頻鏈路技術揭秘
文章出處:【微信號:RFLab_shiyanshi,微信公眾號:RFLab射頻實驗室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論