") 全國(guó)產(chǎn)PSM高壓電源控制系統(tǒng),助力核聚變技術(shù)發(fā)展
全國(guó)產(chǎn)PSM高壓電源控制系統(tǒng),助力核聚變技術(shù)發(fā)展
面對(duì)日益加劇的能源消耗問(wèn)題,核聚變作為一種具有巨大潛力的清潔能源,其研究與開(kāi)發(fā)的重要性日益凸顯。高壓脈沖電源在核聚變反應(yīng)中發(fā)揮著重要作用,它必須具備高電壓、強(qiáng)電流、快速響應(yīng)和精準(zhǔn)控制等特性,以適應(yīng)極端的反應(yīng)條件。
為優(yōu)化高壓電源控制策略,加速其設(shè)計(jì)和優(yōu)化過(guò)程,森木磊石推出了基于國(guó)產(chǎn)PXI控制器的高壓電源控制系統(tǒng)方案。
本篇中我們將對(duì)高壓電源控制系統(tǒng)進(jìn)行介紹,并以100kV、50A量級(jí)的高壓電源為例,驗(yàn)證EasyGo高壓控制系統(tǒng)在不同控制算法下,對(duì)高壓電源的優(yōu)異控制效果。
一、高壓電源控制系統(tǒng)
在高壓電源控制系統(tǒng)方案中:控制部分采用真實(shí)的控制器“國(guó)產(chǎn)PXI”,功率拓?fù)洳糠掷肊asyGo實(shí)時(shí)仿真器模擬,將二者用真實(shí)的物理IO線(xiàn)纜進(jìn)行閉環(huán)連接。
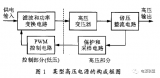
整體系統(tǒng)架構(gòu)下圖所示:
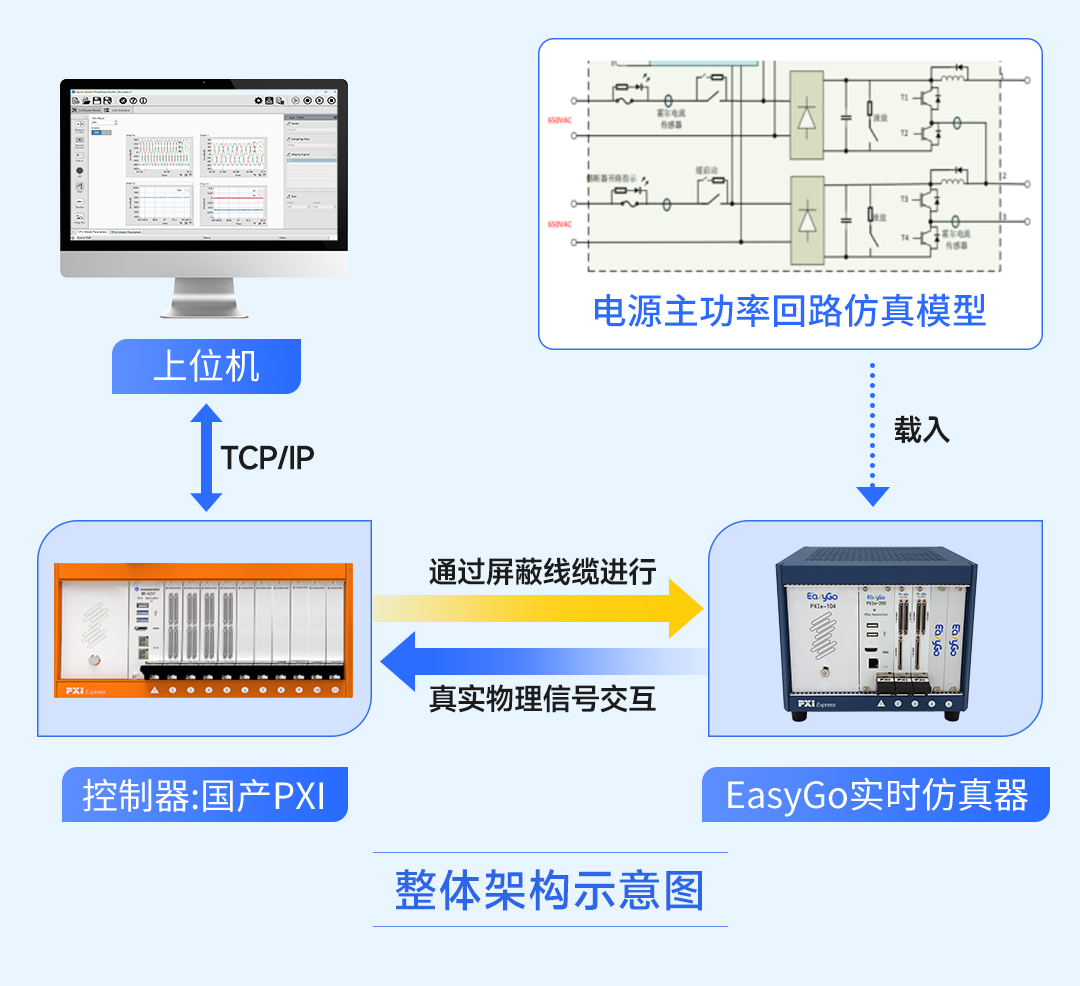
在高壓電源控制系統(tǒng)中,使用國(guó)產(chǎn)PXI作為高壓電源系統(tǒng)的控制器。
國(guó)產(chǎn)PXI:由PXIe控制器,PXIe機(jī)箱,PXIe FPGA 模塊組成,其性能強(qiáng)大,接口豐富,擁有大量的IO通道且支持TCP通訊。

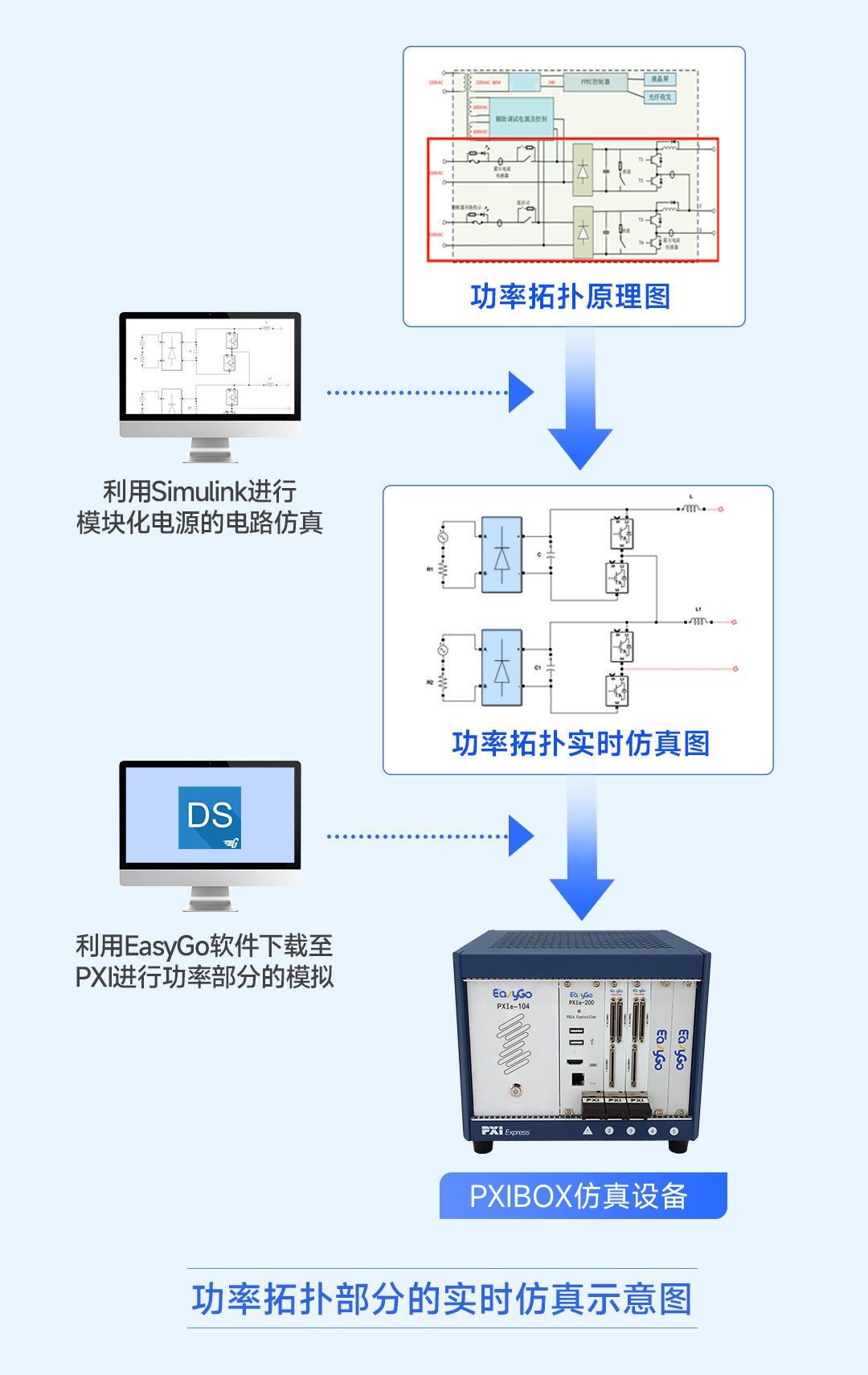
若搭建真實(shí)的高壓電源電路功率拓?fù)洌馁M(fèi)周期長(zhǎng)且進(jìn)行故障工況測(cè)試時(shí)不具有安全性。考慮到多種因素,利用EasyGo實(shí)時(shí)仿真器模擬高壓電源系統(tǒng)。
在實(shí)時(shí)仿真器部分中,只需要利用Simulink搭建好高壓電源模型后,基于EasyGo平臺(tái)將其導(dǎo)入進(jìn)實(shí)時(shí)仿真器中運(yùn)行即可。
二、控制系統(tǒng)優(yōu)勢(shì)

▍模塊化組合,靈活配置:可以配置不同的板卡,適應(yīng)不同的組合,靈活性高。
▍圖形化算法搭建:非代碼式的開(kāi)發(fā),支持圖形控件拖拽進(jìn)行算法邏輯搭建。
▍上位機(jī)實(shí)時(shí)監(jiān)控:上位機(jī)自定義界面支持實(shí)時(shí)下發(fā)控制參數(shù)和數(shù)據(jù)監(jiān)控。
三、控制系統(tǒng)仿真驗(yàn)證
為驗(yàn)證EasyGo高壓電源控制系統(tǒng)方案對(duì)于緊湊型高壓電源系統(tǒng)的控制效果,我們將通過(guò)“PSM控制、PWM配合PSM控制、移相控制”三種控制方法進(jìn)行仿真測(cè)試。
整體系統(tǒng)測(cè)試架構(gòu)如圖:
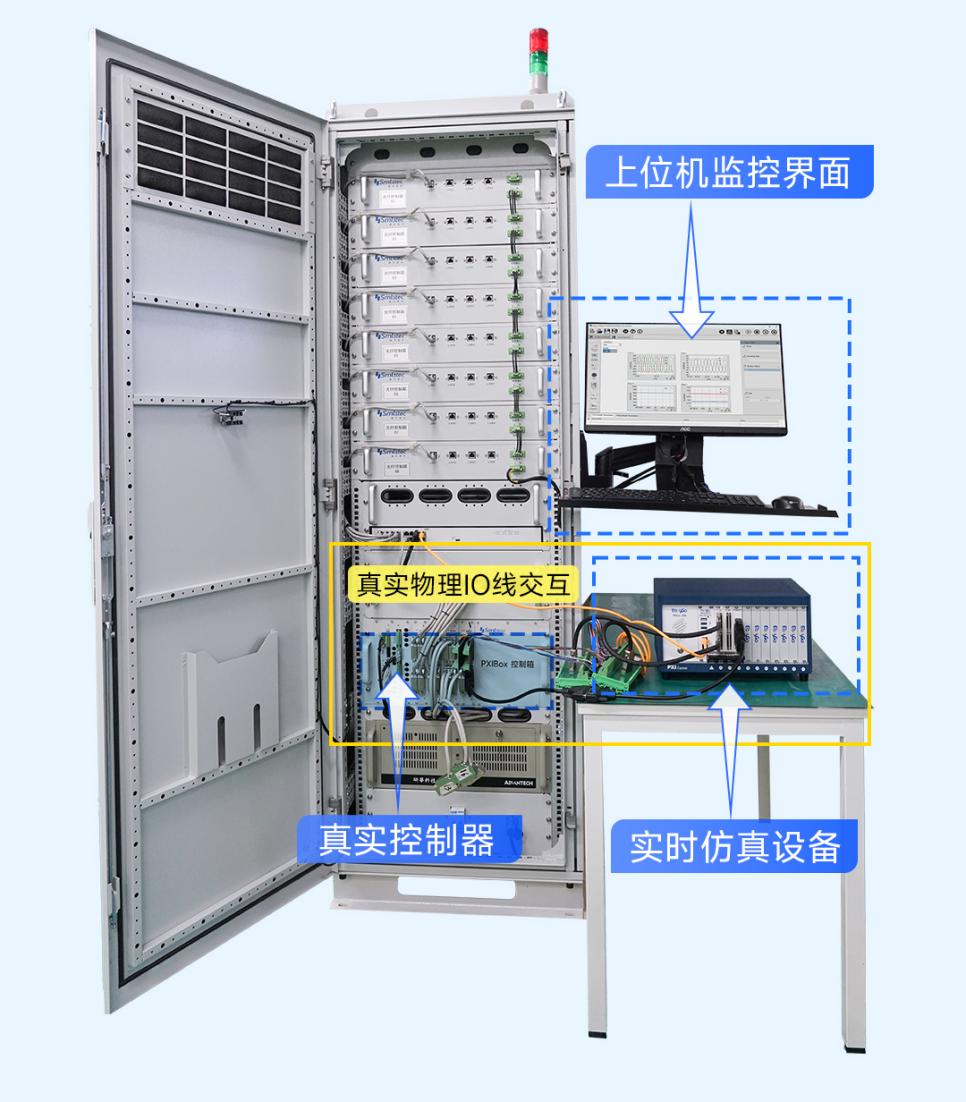
左側(cè)機(jī)柜下方安裝的是國(guó)產(chǎn)PXI控制器,右側(cè)為模擬緊湊型高壓電源的實(shí)時(shí)仿真器PXIBOX,上位機(jī)通過(guò)TCP通訊對(duì)實(shí)時(shí)仿真器進(jìn)行實(shí)時(shí)監(jiān)控。
對(duì)緊湊型高壓電源進(jìn)行模型搭建,由于做原型驗(yàn)證,我們?cè)趯?shí)時(shí)仿真模型中模擬了300個(gè)模塊級(jí)聯(lián)的高壓電源拓?fù)潆娐?/span>。將模型載入到實(shí)時(shí)仿真器中,通過(guò)真實(shí)的物理IO線(xiàn)與真實(shí)控制器進(jìn)行連接,從而來(lái)驗(yàn)證不同的控制算法對(duì)其控制效果。
接下來(lái)以100kV、50A量級(jí)的高壓電源為例,為大家分享基于多種控制方法,對(duì)緊湊型高壓電源系統(tǒng)的控制效果。
1、PSM控制驗(yàn)證
PSM控制算法是根據(jù)目標(biāo)輸出電壓去調(diào)整需要調(diào)用子模塊的個(gè)數(shù)。在調(diào)用單個(gè)子模塊的時(shí)候,對(duì)該子模塊的半橋控制只有上管常開(kāi)下管常關(guān),或者上管常關(guān)下管常開(kāi)兩種。
當(dāng)上管關(guān)下管開(kāi)時(shí),為調(diào)用該模塊;反之,則為不調(diào)用該模塊。電壓環(huán)經(jīng)過(guò)PI后,得到相應(yīng)的需要調(diào)用的子模塊個(gè)數(shù)M,將M輸入到模塊調(diào)用控制中,即可形成閉環(huán)控制。啟動(dòng)控制后,輸出電壓會(huì)步進(jìn)式地逐步向目標(biāo)電壓靠近,直到達(dá)到目標(biāo)電壓。該控制方法的缺點(diǎn)是輸出電壓波紋偏大,缺乏靈活性。
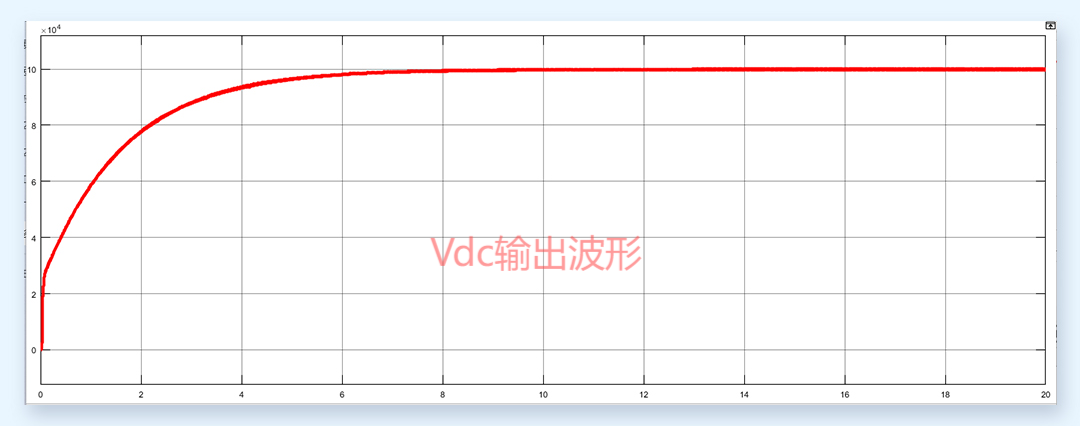
仿真中,控制器設(shè)定目標(biāo)電壓為100kV,可以觀察到:
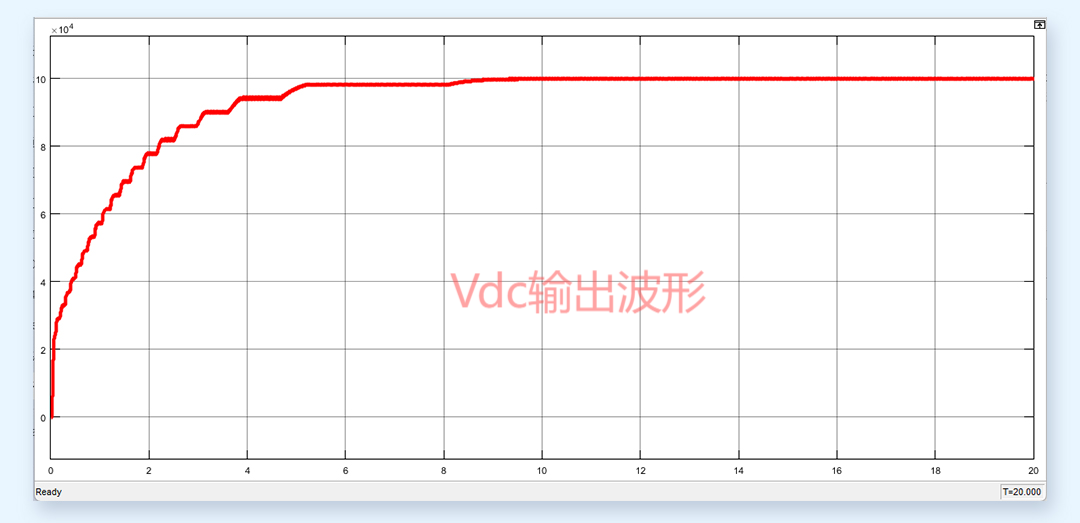
負(fù)載輸出最終控制在100kV左右,調(diào)用的子模塊數(shù)在270個(gè)左右,負(fù)載為阻性負(fù)載2000歐姆,負(fù)載電流為50A左右。Vdc輸出電壓隨著子模塊開(kāi)啟數(shù)量的增加,一步一步增加直到目標(biāo)值,與控制算法邏輯一致。
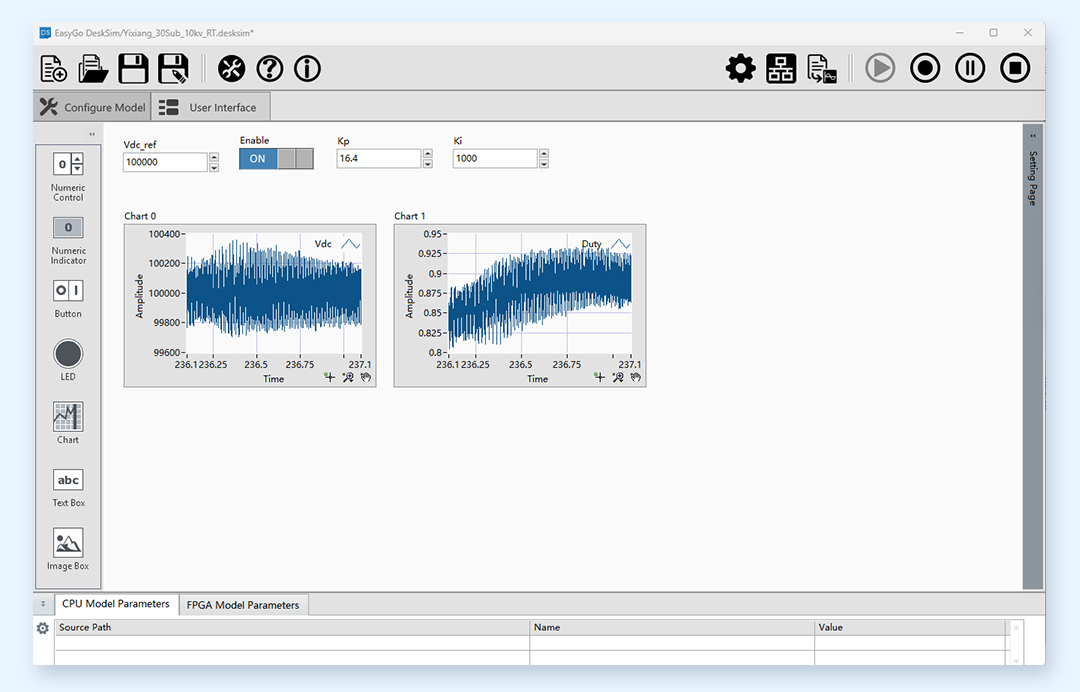
實(shí)時(shí)仿真界面如圖所示:
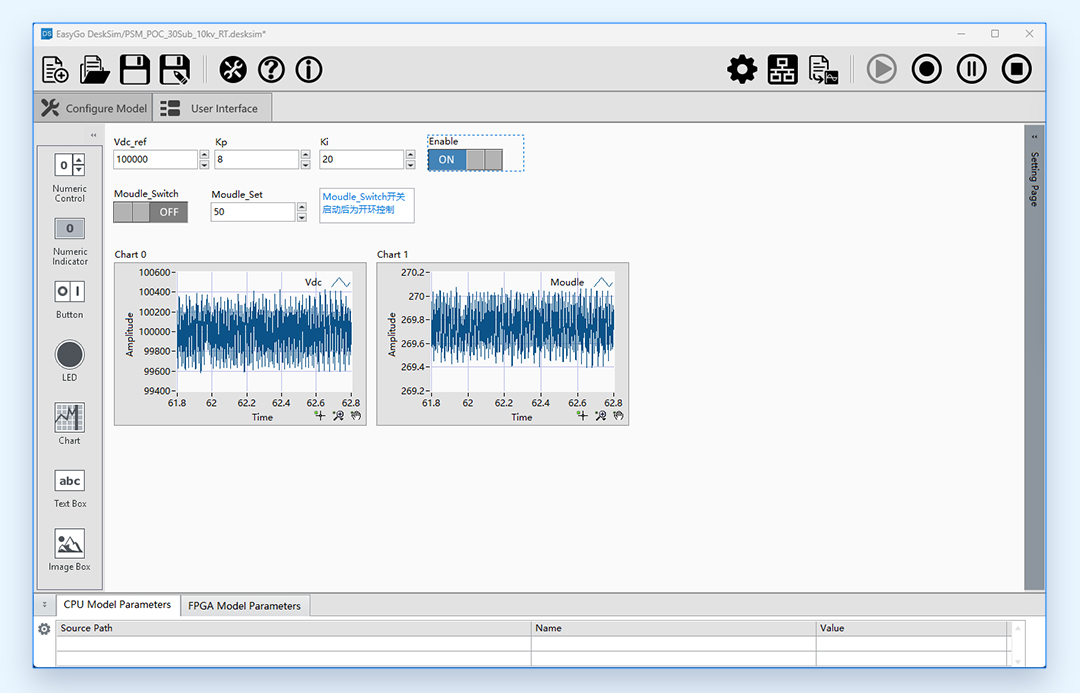
可以看到,負(fù)載電壓穩(wěn)定在99600~100400V左右,使用子模塊數(shù)在270個(gè)左右。
2、PWM配合PSM控制驗(yàn)證
PSM控制紋波較大的主要原因是:不同電壓期望值對(duì)應(yīng)的子模塊投入數(shù)量并非總是理想的整數(shù)。PI控制通過(guò)將計(jì)算結(jié)果的小數(shù)部分轉(zhuǎn)換為占空比,并利用PWM控制來(lái)調(diào)節(jié)一個(gè)固定的子模塊,有效減少紋波。
在控制中,只對(duì)第300個(gè)子模塊使用PWM控制,其他的299個(gè)子模塊依舊是用PSM控制,這樣可以起到PWM配合PSM的作用。
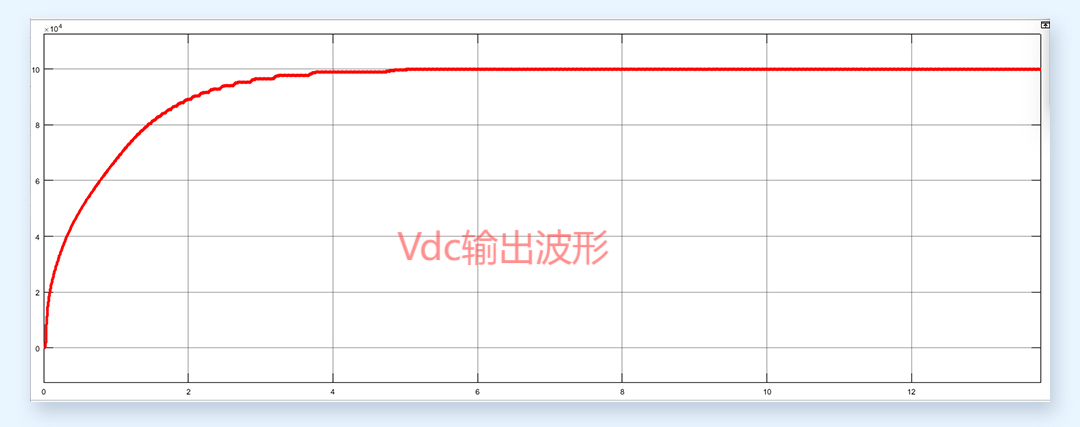
仿真中,控制器設(shè)定目標(biāo)電壓為100kV,可以觀察到波形如圖:
相比于單純的PSM控制算法,其輸出波形平滑了許多,輸出電壓也到達(dá)了設(shè)定值100kV。
實(shí)時(shí)仿真界面如圖所示:
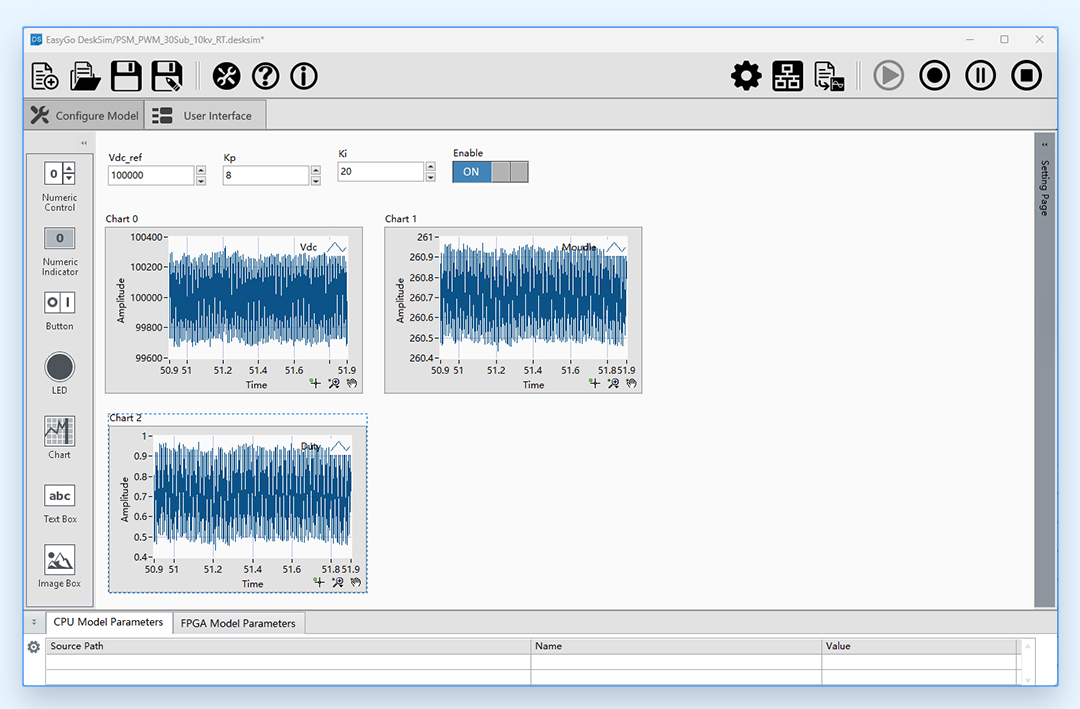
可以發(fā)現(xiàn),負(fù)載電壓穩(wěn)定在99700~100300V左右,其紋波相對(duì)于純PSM控制要優(yōu)化了許多。
3、載波移相控制驗(yàn)證
載波移相控制通過(guò)依次調(diào)整子模塊的載波相位來(lái)實(shí)現(xiàn)。模型包含30個(gè)串聯(lián)模塊,分為0°、120°、240°三組,每組10個(gè),載波相位以36°的間隔遞增。每個(gè)特定的輸出目標(biāo)電壓都有對(duì)應(yīng)的調(diào)制占空比。
仿真中,控制器設(shè)定目標(biāo)電壓為100kV,可以觀察到:
電壓波形達(dá)到設(shè)定值,阻性負(fù)載為2000Ω,電流為50A左右。由于所有的子模塊都進(jìn)入到了工作狀態(tài),且同時(shí)進(jìn)行控制,其達(dá)到目標(biāo)設(shè)定值的時(shí)間相比于前兩種算法要大大縮減。
實(shí)時(shí)仿真界面如下圖所示:
可以發(fā)現(xiàn),負(fù)載電壓穩(wěn)定在99800~100200V左右。
經(jīng)過(guò)對(duì)多種控制算法驗(yàn)證測(cè)試,可以看到國(guó)產(chǎn)PXI控制器控制效果與預(yù)期一致,再次驗(yàn)證了EasyGo高壓電源控制系統(tǒng)方案對(duì)高壓電源的優(yōu)異控制效果,可為高壓電源的設(shè)計(jì)和優(yōu)化提供強(qiáng)有力的支持。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6658瀏覽量
110885 -
電力電子技術(shù)
+關(guān)注
關(guān)注
5文章
93瀏覽量
14009 -
高壓電源
+關(guān)注
關(guān)注
6文章
120瀏覽量
25696 -
PSM
+關(guān)注
關(guān)注
1文章
43瀏覽量
13480 -
核聚變
+關(guān)注
關(guān)注
1文章
49瀏覽量
14555
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
高壓電阻箱如何進(jìn)行負(fù)載測(cè)試?
大功率高壓電源及開(kāi)關(guān)電源的發(fā)展趨勢(shì)
電線(xiàn)電纜耐電痕試驗(yàn)中高壓電源的作用

直流高壓電源技術(shù)發(fā)展淺析
直流高壓電源技術(shù)發(fā)展淺析

模塊電源在高壓電源中的應(yīng)用研究
特種電源發(fā)展走向淺析
使用高度集成的TPS61040的高壓電源

創(chuàng)新國(guó)產(chǎn)PSM高壓電源控制系統(tǒng),推動(dòng)核聚變科技新突破
高壓電源軌上的精密電流測(cè)量應(yīng)用說(shuō)明
高壓電源模塊產(chǎn)品應(yīng)用輸出干擾
用于汽車(chē)應(yīng)用的高壓電源管理IC TPS65311-Q1數(shù)據(jù)表






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論