") 單片機(jī)SPI通信實(shí)現(xiàn)
單片機(jī)SPI通信實(shí)現(xiàn)
在深入探討單片機(jī)(如基于STM32、AVR、PIC等)如何通過SPI(Serial Peripheral Interface)進(jìn)行通信之前,我們先概述SPI通信的基本原理,隨后以STM32微控制器為例,詳細(xì)解釋如何配置SPI接口,并提供相應(yīng)的代碼示例。
SPI通信基本原理
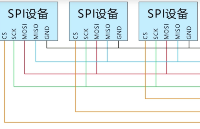
SPI是一種高速、全雙工、同步的通信總線,用于微控制器與各種外圍設(shè)備(如傳感器、存儲(chǔ)器、顯示器等)之間的通信。SPI由以下幾根線組成:
- SCK (Serial Clock) : 串行時(shí)鐘信號(hào),由主設(shè)備生成,用于同步數(shù)據(jù)傳輸。
- MOSI (Master Out Slave In) : 主設(shè)備數(shù)據(jù)輸出,從設(shè)備數(shù)據(jù)輸入。
- MISO (Master In Slave Out) : 主設(shè)備數(shù)據(jù)輸入,從設(shè)備數(shù)據(jù)輸出。
- SS (Slave Select) : 從設(shè)備選擇信號(hào),由主設(shè)備控制,用于選擇通信的從設(shè)備(有時(shí)也寫作CS,Chip Select)。
SPI可以配置為多種模式,主要通過時(shí)鐘極性和相位的不同組合來實(shí)現(xiàn)(CPOL和CPHA):
- CPOL (Clock Polarity): 時(shí)鐘信號(hào)的空閑狀態(tài)(高電平或低電平)。
- CPHA (Clock Phase): 數(shù)據(jù)采樣發(fā)生在時(shí)鐘的哪個(gè)邊緣(上升沿或下降沿)。
STM32 SPI配置示例
1. 硬件連接
首先,確保你的STM32開發(fā)板上的SPI引腳已經(jīng)正確連接到目標(biāo)外設(shè)的SPI接口。以STM32F103為例,通常SPI1的引腳包括PA5(SCK), PA6(MISO), PA7(MOSI), 和 PA4(NSS)。
2. 軟件配置
STM32的SPI配置通常通過HAL庫或標(biāo)準(zhǔn)外設(shè)庫來實(shí)現(xiàn)。這里以STM32CubeMX結(jié)合HAL庫為例。
a. 使用STM32CubeMX配置SPI
- 打開STM32CubeMX,創(chuàng)建一個(gè)新項(xiàng)目并選擇你的STM32設(shè)備。
- 在“Pinout & Configuration”選項(xiàng)卡中,找到SPI接口(如SPI1),點(diǎn)擊配置它。
- 設(shè)置SPI的基本參數(shù),如SPI模式(Mode)、數(shù)據(jù)大小(Data Size)、時(shí)鐘極性(CPOL)、時(shí)鐘相位(CPHA)、波特率預(yù)分頻器(Baudrate Prescaler)等。
- 啟用中斷(如果需要)和DMA(如果處理大量數(shù)據(jù))。
- 生成代碼,并選擇合適的IDE(如Keil uVision, IAR, SW4STM32等)。
b. 編寫SPI通信代碼
以下是基于HAL庫的SPI初始化代碼和簡單的讀寫函數(shù)示例。
#include "stm32f1xx_hal.h"
SPI_HandleTypeDef hspi1;
void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 7;
HAL_SPI_Init(&hspi1);
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* hspi)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(hspi- >Instance==SPI1)
{
__HAL_RCC_SPI1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**SPI1 GPIO Configuration
PA5 ------ > SPI1_SCK
PA6 ------ > SPI1_MISO
PA7 ------ > SPI1_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 如果需要,配置NSS引腳
// ...
}
}
// SPI 發(fā)送函數(shù)
HAL_StatusTypeDef SPI_SendData(uint8_t *pData, uint16_t Size)
{
return HAL_SPI_Transmit(&hspi1, pData, Size, HAL_MAX_DELAY);
}
// SPI 接收函數(shù)
HAL_StatusTypeDef SPI_ReceiveData(uint8_t *pData, uint16_t Size)
{
return HAL_SPI_Receive(&hspi1, pData, Size, HAL_MAX_DELAY);
}
// 可以在主函數(shù)或其他地方調(diào)用這些函數(shù)進(jìn)行通信
int main(void)
{
HAL_Init();
MX_SPI1_Init();
uint8_t txData[] = {0x01, 0x02, 0x03};
uint8_t rxData[3];
// 發(fā)送數(shù)據(jù)
if(HAL_OK == SPI_SendData(txData, sizeof(txData)/sizeof(txData[0])))
{
// 接收數(shù)據(jù)(這里假設(shè)立即回復(fù))
if(HAL_OK == SPI_ReceiveData(rxData, sizeof(rxData)/sizeof(rxData[0])))
{
// 處理接收到的數(shù)據(jù)
}
}
while (1)
{
// 循環(huán)體
}
}
總結(jié)
以上代碼示例展示了如何在STM32微控制器上配置和使用SPI接口進(jìn)行基本的數(shù)據(jù)發(fā)送和接收。在實(shí)際應(yīng)用中,你可能需要根據(jù)具體的外設(shè)規(guī)格調(diào)整SPI的配置參數(shù),并處理通信過程中的錯(cuò)誤和中斷。此外,對(duì)于復(fù)雜的應(yīng)用場景,還可能需要實(shí)現(xiàn)更高級(jí)的通信協(xié)議和數(shù)據(jù)處理邏輯。
-
單片機(jī)
+關(guān)注
關(guān)注
6043文章
44621瀏覽量
638624 -
STM32
+關(guān)注
關(guān)注
2272文章
10924瀏覽量
357602 -
SPI通信
+關(guān)注
關(guān)注
0文章
35瀏覽量
11432
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
單片機(jī)spi通信原理詳解
LabVIEW串口通信實(shí)例:PC機(jī)與51單片機(jī)串口通信實(shí)例
LabVIEW串口通信實(shí)例:PC機(jī)與51單片機(jī)串口通信實(shí)例
AT89系列單片機(jī)與PC機(jī)的串行通信實(shí)驗(yàn)電路圖

PC 機(jī)與單片機(jī)串行通信實(shí)現(xiàn)
單片機(jī)與PLC之間的串行通信實(shí)現(xiàn)
基于89c51單片機(jī)的NRF24L01通信實(shí)驗(yàn)
單片機(jī)應(yīng)用系統(tǒng)設(shè)計(jì)技術(shù)——雙單片機(jī)串口通信實(shí)驗(yàn)

51單片機(jī)學(xué)習(xí) 串行口通信實(shí)驗(yàn)
基于STM32單片機(jī)無線通信實(shí)驗(yàn)使用庫文件設(shè)計(jì)源代碼
基于LabVIEW的單片機(jī)串口通信實(shí)現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論