") 第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析
功能介紹放開(kāi)頭, 使用便捷無(wú)需愁
這是全網(wǎng)最詳細(xì)、性價(jià)比最高的STM32實(shí)戰(zhàn)項(xiàng)目入門教程,通過(guò)合理的硬件設(shè)計(jì)和詳細(xì)的視頻筆記介紹,硬件使用STM32F103主控資料多方便學(xué)習(xí),通過(guò)3萬(wàn)字筆記、12多個(gè)小時(shí)視頻、20多章節(jié)代碼手把手教會(huì)你如何開(kāi)發(fā)和調(diào)試。讓你更快掌握嵌入式系統(tǒng)開(kāi)發(fā)。
**V3.3.0-STM32智能小車 **
**視頻: **[https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click]
V3:HAL庫(kù)開(kāi)發(fā)、功能:PID速度控制、PID循跡、PID跟隨、遙控、避障、PID角度控制、視覺(jué)控制、電磁循跡、RTOS等功能。
講解一下我們小車?yán)锩娴难E部分,包括紅外基礎(chǔ)使用,無(wú)PID循跡和有PID循跡。
第13章-循跡功能
13.1-非PID循跡功能完成
先紅外對(duì)管調(diào)試
我們這里學(xué)習(xí)一下,如何實(shí)現(xiàn)循跡功能
如何才能讓小車沿著黑線運(yùn)動(dòng)、要讓小車感知到黑線的位置,使用這種傳感器就可以反饋黑線是否存在
根據(jù)傳感器特性,我們檢測(cè)紅外對(duì)管DO引腳的電壓就可以知道,下面有沒(méi)有黑線
DO 高電平->有黑線 小燈滅
DO低電平->沒(méi)有黑線 小燈亮
這是好多地方對(duì)這個(gè)產(chǎn)品的說(shuō)明

然后我們組合上面的紅外對(duì)管,安裝到小車上,就可以知道小車是否偏離了黑線,
下面我們通過(guò)單片機(jī)讀取紅外對(duì)管DO口的電壓,就知道黑線在小車下面的位置了
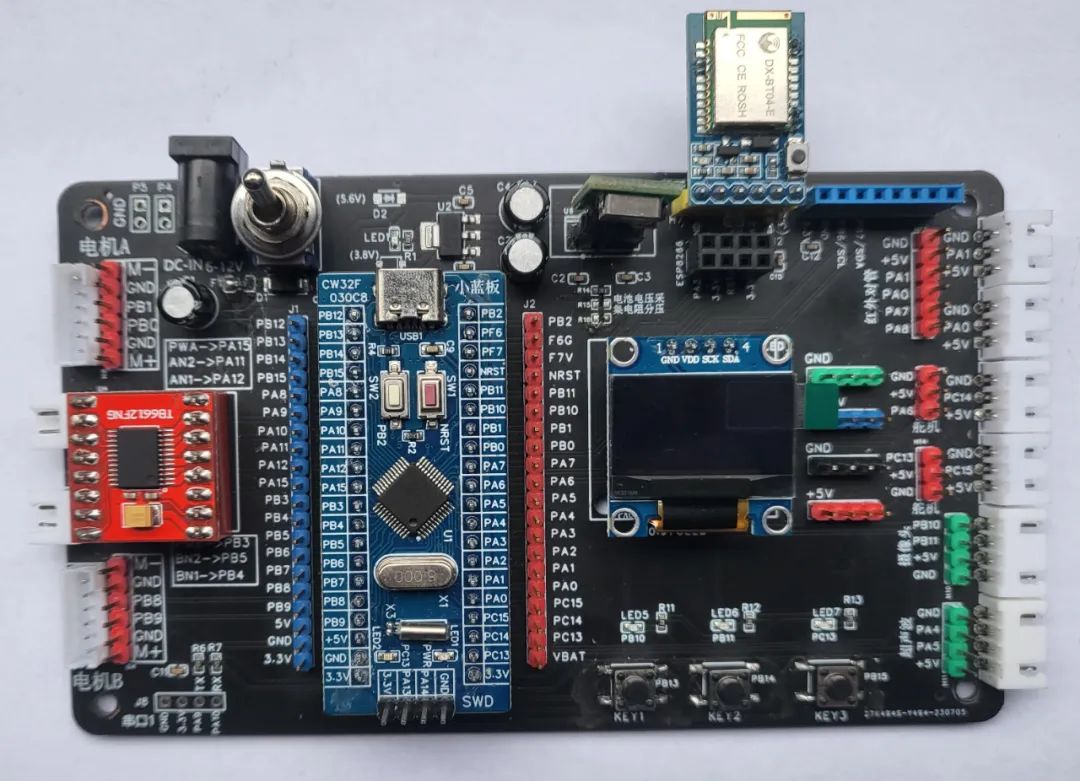
STM32初始化
先看原理圖需要初始化那些引腳
把****OUT_1-PA5、OUT_2-PA7、OUT_3-PB0、OUT_4-PB1初始化為輸入模式**
**
重新生成
然后我們?cè)趃pio.h 添加讀取GPIO的宏,使得程序更簡(jiǎn)潔
#define READ_HW_OUT_1 HAL_GPIO_ReadPin(HW_OUT_1_GPIO_Port,HW_OUT_1_Pin) //讀取紅外對(duì)管連接的GPIO電平
#define READ_HW_OUT_2 HAL_GPIO_ReadPin(HW_OUT_2_GPIO_Port,HW_OUT_2_Pin)
#define READ_HW_OUT_3 HAL_GPIO_ReadPin(HW_OUT_3_GPIO_Port,HW_OUT_3_Pin)
#define READ_HW_OUT_4 HAL_GPIO_ReadPin(HW_OUT_4_GPIO_Port,HW_OUT_4_Pin)
根據(jù)紅外對(duì)管狀態(tài)控制電機(jī)速度
注意:整個(gè)主函數(shù)不要加入延時(shí),這樣實(shí)時(shí)性更高,可以根據(jù)紅外對(duì)管狀態(tài)做出及時(shí)控制
if(READ_HW_OUT_1 == 0&&READ_HW_OUT_2 == 0&&READ_HW_OUT_3 == 0&&READ_HW_OUT_4 == 0 )
{
printf("應(yīng)該前進(jìn)rn");
motorPidSetSpeed(1,1);//前運(yùn)動(dòng)
}
if(READ_HW_OUT_1 == 0&&READ_HW_OUT_2 == 1&&READ_HW_OUT_3 == 0&&READ_HW_OUT_4 == 0 )
{
printf("應(yīng)該右轉(zhuǎn)rn");
motorPidSetSpeed(0.5,2);//右邊運(yùn)動(dòng)
}
if(READ_HW_OUT_1 == 1&&READ_HW_OUT_2 == 0&&READ_HW_OUT_3 == 0&&READ_HW_OUT_4 == 0 )
{
printf("快速右轉(zhuǎn)rn");
motorPidSetSpeed(0.5,2.5);//快速右轉(zhuǎn)
}
if(READ_HW_OUT_1 == 0&&READ_HW_OUT_2 == 0&&READ_HW_OUT_3 == 1&&READ_HW_OUT_4 == 0 )
{
printf("應(yīng)該左轉(zhuǎn)rn");
motorPidSetSpeed(2,0.5);//左邊運(yùn)動(dòng)
}
if(READ_HW_OUT_1 == 0&&READ_HW_OUT_2 == 0&&READ_HW_OUT_3 == 0&&READ_HW_OUT_4 == 1 )
{
printf("快速左轉(zhuǎn)rn");
motorPidSetSpeed(2.5,0.5);//快速左轉(zhuǎn)
}
然后測(cè)試
- 測(cè)試紅外對(duì)管靈敏度,放在有黑線的地上或者紙上,然后把小車黑線比如放到最右邊 及第一個(gè)紅外對(duì)管,觀察紅外對(duì)管小燈變化情況和串口輸出情況,如果小燈沒(méi)有滅,就調(diào)節(jié)紅外對(duì)管靈敏度和室內(nèi)燈光,直到每個(gè)紅外對(duì)管都可以感應(yīng)到小燈。
- 然后在黑線上讓小車循跡
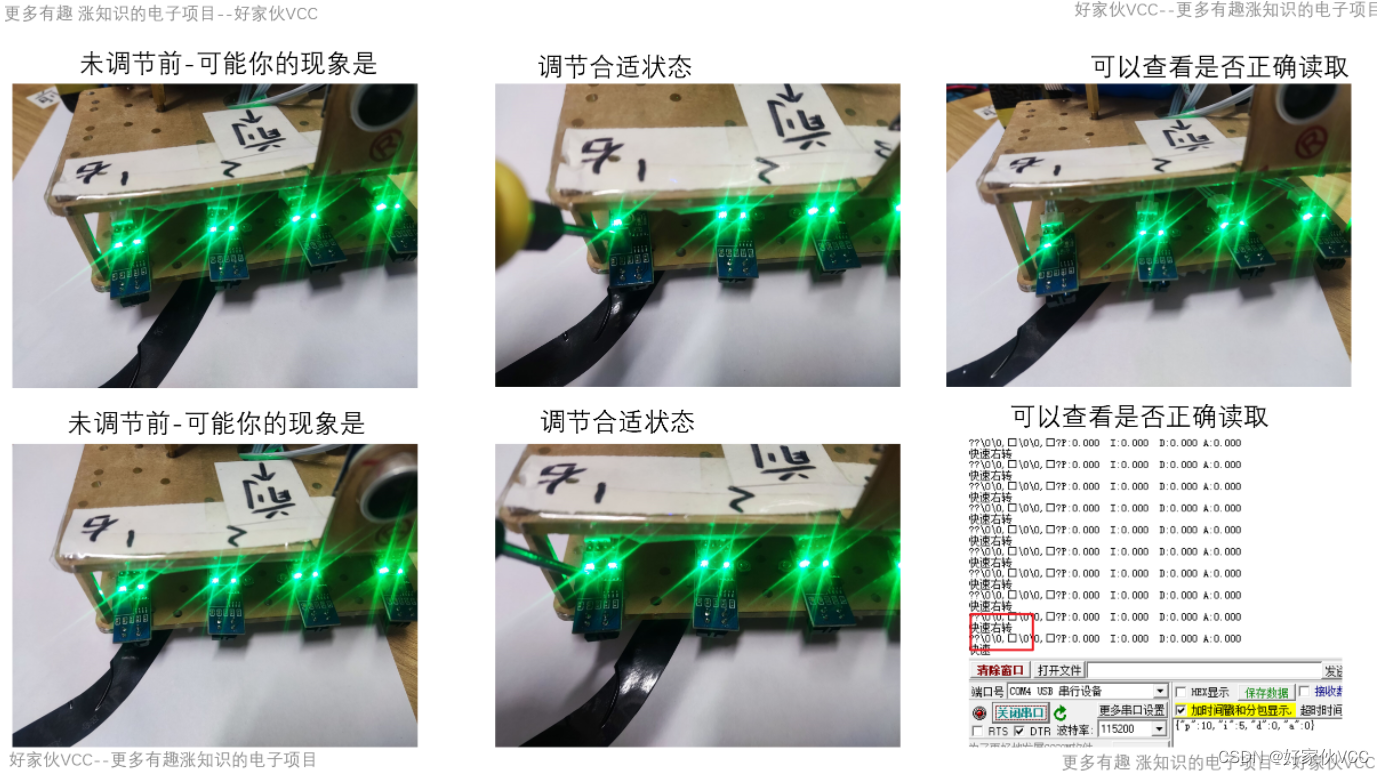
然后循跡功能完成
然后放到地上
13.2-加入循跡PID
前面的代碼我們對(duì)循跡是判斷的幾個(gè)狀態(tài),然后PID控制電機(jī)不同速度,但是我們可以使用紅外對(duì)管狀態(tài)作為PID控制的輸入然后再控制電機(jī)。
PID的輸入是紅外對(duì)管狀態(tài),我們?cè)O(shè)計(jì) PID輸入是紅外對(duì)管的狀態(tài)、然后輸出一個(gè)速度值,然后左右電機(jī)去加或者減這個(gè)值,就可以完成根據(jù)紅外對(duì)管輸入對(duì)電機(jī)的差速控制
主函數(shù)添加的
extern tPid pidHW_Tracking;//紅外循跡的PID
uint8_t g_ucaHW_Read[4] = {0};//保存紅外對(duì)管電平的數(shù)組
int8_t g_cThisState = 0;//這次狀態(tài)
int8_t g_cLastState = 0; //上次狀態(tài)
float g_fHW_PID_Out;//紅外對(duì)管PID計(jì)算輸出速度
float g_fHW_PID_Out1;//電機(jī)1的最后循跡PID控制速度
float g_fHW_PID_Out2;//電機(jī)2的最后循跡PID控制速度
然后實(shí)現(xiàn)PID循跡控制、注意為了更加快,要減少?zèng)]有必要的程序和優(yōu)化判斷、將沒(méi)有必要的輸出都注釋掉
g_ucaHW_Read[0] = READ_HW_OUT_1;//讀取紅外對(duì)管狀態(tài)、這樣相比于寫在if里面更高效
g_ucaHW_Read[1] = READ_HW_OUT_2;
g_ucaHW_Read[2] = READ_HW_OUT_3;
g_ucaHW_Read[3] = READ_HW_OUT_4;
?
if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )
{
//printf("應(yīng)該前進(jìn)rn");//注釋掉更加高效,減少無(wú)必要程序執(zhí)行
g_cThisState = 0;//前進(jìn)
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 1&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )//使用else if更加合理高效
{
//printf("應(yīng)該右轉(zhuǎn)rn");
g_cThisState = -1;//應(yīng)該右轉(zhuǎn)
}
else if(g_ucaHW_Read[0] == 1&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0 )
{
//printf("快速右轉(zhuǎn)rn");
g_cThisState = -2;//快速右轉(zhuǎn)
}
else if(g_ucaHW_Read[0] == 1&&g_ucaHW_Read[1] == 1&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 0)
{
//printf("快速右轉(zhuǎn)rn");
g_cThisState = -3;//快速右轉(zhuǎn)
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 1&&g_ucaHW_Read[3] == 0 )
{
//printf("應(yīng)該左轉(zhuǎn)rn");
g_cThisState = 1;//應(yīng)該左轉(zhuǎn)
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 0&&g_ucaHW_Read[3] == 1 )
{
//printf("快速左轉(zhuǎn)rn");
g_cThisState = 2;//快速左轉(zhuǎn)
}
else if(g_ucaHW_Read[0] == 0&&g_ucaHW_Read[1] == 0&&g_ucaHW_Read[2] == 1&&g_ucaHW_Read[3] == 1)
{
// printf("快速左轉(zhuǎn)rn");
g_cThisState = 3;//快速左轉(zhuǎn)
}
g_fHW_PID_Out = PID_realize(&pidHW_Tracking,g_cThisState);//PID計(jì)算輸出目標(biāo)速度 這個(gè)速度,會(huì)和基礎(chǔ)速度加減
?
g_fHW_PID_Out1 = 3 + g_fHW_PID_Out;//電機(jī)1速度=基礎(chǔ)速度+循跡PID輸出速度
g_fHW_PID_Out2 = 3 - g_fHW_PID_Out;//電機(jī)1速度=基礎(chǔ)速度-循跡PID輸出速度
if(g_fHW_PID_Out1 >5) g_fHW_PID_Out1 =5;//進(jìn)行限幅 限幅速度在0-5之間
if(g_fHW_PID_Out1 < 0) g_fHW_PID_Out1 =0;
if(g_fHW_PID_Out2 >5) g_fHW_PID_Out2 =5;
if(g_fHW_PID_Out2 < 0) g_fHW_PID_Out2 =0;
if(g_cThisState != g_cLastState)//如何這次狀態(tài)不等于上次狀態(tài)、就進(jìn)行改變目標(biāo)速度和控制電機(jī)、在定時(shí)器中依舊定時(shí)控制電機(jī)
{
motorPidSetSpeed(g_fHW_PID_Out1,g_fHW_PID_Out2);//通過(guò)計(jì)算的速度控制電機(jī)
}
g_cLastState = g_cThisState;//保存上次紅外對(duì)管狀態(tài)
在pid.中
tPid pidHW_Tracking;//紅外循跡的PID

?
pidHW_Tracking.actual_val=0.0;
pidHW_Tracking.target_val=0.00;//紅外循跡PID 的目標(biāo)值為0
pidHW_Tracking.err=0.0;
pidHW_Tracking.err_last=0.0;
pidHW_Tracking.err_sum=0.0;
pidHW_Tracking.Kp=-1.50;
pidHW_Tracking.Ki=0;
pidHW_Tracking.Kd=0.80;
然后就可以跑一下試試了。
可以改進(jìn)的地方
- 紅外對(duì)管影響差速轉(zhuǎn)向,也影響基礎(chǔ)直行的速度 ,會(huì)有更好控制效果,所以可以加入每種紅外對(duì)管狀態(tài)下對(duì)基礎(chǔ)速度的影響。
- 紅外對(duì)管的數(shù)量越多,效果會(huì)越好。
第15章我們會(huì)講解手機(jī)遙控的功能
審核編輯 黃宇
-
單片機(jī)
+關(guān)注
關(guān)注
6043文章
44621瀏覽量
638495 -
STM32
+關(guān)注
關(guān)注
2272文章
10923瀏覽量
357547 -
智能小車
+關(guān)注
關(guān)注
87文章
549瀏覽量
81858 -
算法分析
+關(guān)注
關(guān)注
0文章
9瀏覽量
7648 -
循跡
+關(guān)注
關(guān)注
0文章
14瀏覽量
13106
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
20.3-使用兩個(gè)通道進(jìn)行電磁循跡 智能車競(jìng)賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法

PID循跡模塊原理
紅外循跡傳感器PID循跡算法的相關(guān)資料分享
紅外循跡傳感器PID循跡算法

基于CW32的遙控循跡小車





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論