 如何在PyTorch中實現LeNet-5網絡
如何在PyTorch中實現LeNet-5網絡
在PyTorch中實現LeNet-5網絡是一個涉及深度學習基礎知識、PyTorch框架使用以及網絡架構設計的綜合性任務。LeNet-5是卷積神經網絡(CNN)的早期代表之一,由Yann LeCun等人提出,主要用于手寫數字識別任務(如MNIST數據集)。下面,我將詳細闡述如何在PyTorch中從頭開始實現LeNet-5網絡,包括網絡架構設計、參數初始化、前向傳播、損失函數選擇、優化器配置以及訓練流程等方面。
一、引言
LeNet-5網絡以其簡潔而有效的結構,在深度學習發展史上占有重要地位。它主要由卷積層、池化層、全連接層等構成,通過堆疊這些層來提取圖像中的特征,并最終進行分類。在PyTorch中實現LeNet-5,不僅可以幫助我們理解CNN的基本原理,還能為更復雜網絡的設計和實現打下基礎。
二、PyTorch環境準備
在開始編寫代碼之前,請確保已安裝PyTorch及其依賴庫。可以通過PyTorch官網提供的安裝指令進行安裝。此外,還需要安裝NumPy、Matplotlib等庫,用于數據處理和結果可視化。
三、LeNet-5網絡架構設計
LeNet-5網絡結構通常包括兩個卷積層、兩個池化層、兩個全連接層以及一個輸出層。下面是在PyTorch中定義LeNet-5結構的代碼示例:
import torch
import torch.nn as nn
import torch.nn.functional as F
class LeNet5(nn.Module):
def __init__(self, num_classes=10):
super(LeNet5, self).__init__()
self.conv1 = nn.Conv2d(1, 6, kernel_size=5, stride=1, padding=2)
self.relu1 = nn.ReLU(inplace=True)
self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2)
self.conv2 = nn.Conv2d(6, 16, kernel_size=5, stride=1)
self.relu2 = nn.ReLU(inplace=True)
self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2)
self.fc1 = nn.Linear(16 * 5 * 5, 120) # 假設輸入圖像大小為32x32
self.relu3 = nn.ReLU(inplace=True)
self.fc2 = nn.Linear(120, 84)
self.relu4 = nn.ReLU(inplace=True)
self.fc3 = nn.Linear(84, num_classes)
def forward(self, x):
x = self.pool1(self.relu1(self.conv1(x)))
x = self.pool2(self.relu2(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5) # 展平
x = self.relu3(self.fc1(x))
x = self.relu4(self.fc2(x))
x = self.fc3(x)
return x
四、參數初始化
在PyTorch中,模型參數(如權重和偏置)的初始化對模型的性能有很大影響。LeNet-5的權重通常使用隨機初始化方法,如正態分布或均勻分布。PyTorch的nn.Module在初始化時會自動調用reset_parameters()方法(如果定義了的話),用于初始化所有可學習的參數。但在上面的LeNet5類中,我們沒有重寫reset_parameters()方法,因為nn.Conv2d和nn.Linear已經提供了合理的默認初始化策略。
五、前向傳播
在forward方法中,我們定義了數據通過網絡的前向傳播路徑。輸入數據x首先經過兩個卷積層和兩個池化層,提取圖像特征,然后將特征圖展平為一維向量,最后通過兩個全連接層進行分類。
六、損失函數與優化器
在訓練過程中,我們需要定義損失函數和優化器。對于分類任務,常用的損失函數是交叉熵損失(CrossEntropyLoss)。優化器則用于更新模型的參數,以最小化損失函數。常用的優化器包括SGD、Adam等。
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
七、訓練流程
訓練流程通常包括以下幾個步驟:
- 數據加載 :使用PyTorch的`DataLoader來加載和預處理訓練集和驗證集(或測試集)。
- 模型實例化 :創建LeNet-5模型的實例。
- 訓練循環 :在訓練集中迭代,對每個批次的數據執行前向傳播、計算損失、執行反向傳播并更新模型參數。
- 驗證/測試 :在每個epoch結束時,使用驗證集(或測試集)評估模型的性能,以便監控訓練過程中的過擬合情況或評估最終模型的性能。
- 保存模型 :在訓練完成后,保存模型以便將來使用。
下面是訓練流程的代碼示例:
# 假設已有DataLoader實例 train_loader, val_loader
# 實例化模型
model = LeNet5(num_classes=10) # 假設是10分類問題
# 損失函數和優化器
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
# 訓練模型
num_epochs = 10
for epoch in range(num_epochs):
model.train() # 設置模型為訓練模式
total_loss = 0
for images, labels in train_loader:
# 將數據轉移到GPU(如果可用)
images, labels = images.to(device), labels.to(device)
# 前向傳播
outputs = model(images)
loss = criterion(outputs, labels)
# 反向傳播和優化
optimizer.zero_grad() # 清除之前的梯度
loss.backward() # 反向傳播計算梯度
optimizer.step() # 更新權重
# 累加損失
total_loss += loss.item()
# 在驗證集上評估模型
model.eval() # 設置模型為評估模式
val_loss = 0
correct = 0
with torch.no_grad(): # 評估時不計算梯度
for images, labels in val_loader:
images, labels = images.to(device), labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
val_loss += criterion(outputs, labels).item()
correct += (predicted == labels).sum().item()
# 打印訓練和驗證結果
print(f'Epoch {epoch+1}, Train Loss: {total_loss/len(train_loader)}, Val Loss: {val_loss/len(val_loader)}, Val Accuracy: {correct/len(val_loader.dataset)*100:.2f}%')
# 保存模型
torch.save(model.state_dict(), 'lenet5_model.pth')
八、模型評估與測試
在訓練完成后,我們通常會在一個獨立的測試集上評估模型的性能,以確保模型在未見過的數據上也能表現良好。評估過程與驗證過程類似,但通常不會用于調整模型參數。
九、模型部署
訓練好的模型可以部署到各種環境中,如邊緣設備、服務器或云端。部署時,需要確保模型與目標平臺的兼容性,并進行適當的優化以提高性能。
十、結論
在PyTorch中實現LeNet-5網絡是一個理解卷積神經網絡基本結構和訓練流程的好方法。通過實踐,我們可以掌握PyTorch框架的使用方法,了解如何設計網絡架構、選擇損失函數和優化器、編寫訓練循環等關鍵步驟。此外,通過調整網絡參數、優化訓練過程和使用不同的數據集,我們可以進一步提高模型的性能,并探索深度學習在更多領域的應用。
-
網絡
+關注
關注
14文章
7599瀏覽量
89244 -
深度學習
+關注
關注
73文章
5513瀏覽量
121546 -
pytorch
+關注
關注
2文章
808瀏覽量
13360
發布評論請先 登錄
相關推薦
FPGA實現LeNet-5卷積神經網絡
一文讀懂物體分類AI算法:LeNet-5 AlexNet VGG Inception ResNet MobileNet
【NanoPi K1 Plus試用體驗】深度學習---實現Lenet
STM32網絡的三大件
STM32網絡控制器的SMI接口
如何在PyTorch上學習和創建網絡模型呢?
IPv6網絡中基于域名的通用用戶標識系統
R4網絡中的關鍵技術
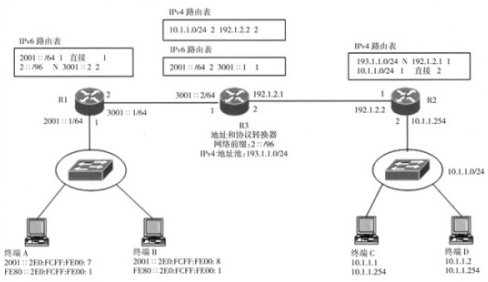
基于網絡地址和協議轉換實現IPv4網絡和IPv6網絡互連
如何在RS-485網絡中使用MSP430和MSP432 eUSCI和USCI模塊






 工商網監
工商網監
評論