 常用的RGB-D SLAM解決方案
常用的RGB-D SLAM解決方案
目前室內RGB-D SLAM的sota方法有哪些呢?
由于室內場景的稠密三維重建是一個非常火熱的研究領域了,到目前為止出現了許許多多好的研究工作,恕能力和時間的限制,不能進行一一介紹,所以對目前一些比較常用的RGB-D SLAM解決方案進行介紹。
1.BundleFusion
BundleFusion是一種稠密的實時室內場景三維重建算法框架。輸入為RGB-D相機采集的并且是對齊好的RGB圖像和深度圖的數據流。輸出為重建好的稠密三維場景模型。
整個算法流程如下圖所示:

其優點在于重建效果在所有RGB-D SLAM中靠前,支持在GPU上實時魯棒跟蹤,可以在跟蹤失敗時移動到重建成功的地方進行重定位,匹配上后繼續跟蹤。
但是缺點在于由于成像傳感器存在噪音,稀疏關鍵點匹配可能產生小的局部誤匹配。這些誤匹配可能會在全局優化中傳播,導致誤差累積。實際重建時效果和所使用深度相機的性能、待重建場景的紋理豐富程度關系很大。
論文獲取地址:http://arxiv.org/pdf/1604.01093.pdf
項目地址:https://graphics.stanford.edu/projects/bundlefusion/
源碼獲取地址:https://github.com/niessner/BundleFusion
2.InfiniTAM
InfiniTAM是牛津大學于2016年發表的稠密SLAM方案,目前已經發展到了v3版本,該方案基于KinectFusion和體素塊哈希表發展而來。首先,InfiniTAM方案在建圖部分利用TSDF模型(截斷符號距離場)進行建模,只是在建模的時候,不是對整個空間都劃分等大小的網格,而是只在場景表面的周圍劃分網格,且只為待重建的表面上的體素塊分配顯存,并使用哈希表這一結構來管理GPU對體素塊的內存分配和數據訪問。通過這樣的方法,InfiniTAM 大大減小了稠密建圖對 GPU 的內存消耗,提升了算法效率。
算法流程如下圖所示:
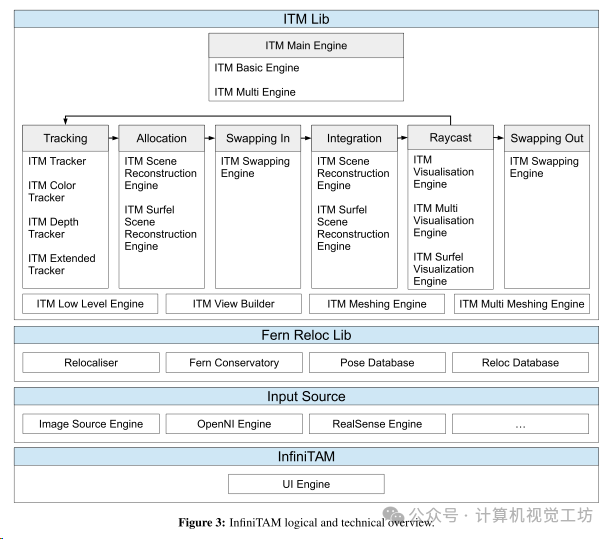
項目地址:https://www.robots.ox.ac.uk/~victor/infinitam/index.html
代碼獲取地址:https://github.com/victorprad/InfiniTAM
3.RTAB-Map
RTAB-Map(基于外觀的實時映射)是一種基于RGB-D、立體和激光雷達的SLAM算法框架,它以基于外觀的增量閉環檢測為基礎。閉環檢測使用詞袋法來確定新圖像來自先前位置或新位置的可能性。當閉環檢測假設被接受時,一個新的約束將被添加到地圖的圖形中,然后圖形優化器將地圖中的誤差最小化。RTAB-Map可單獨與手持Kinect、立體攝像頭或3D激光雷達配合使用,用于6DoF地圖繪制;也可與配備激光測距儀的機器人配合使用,用于3DoF地圖繪制。
算法流程如下圖所示:
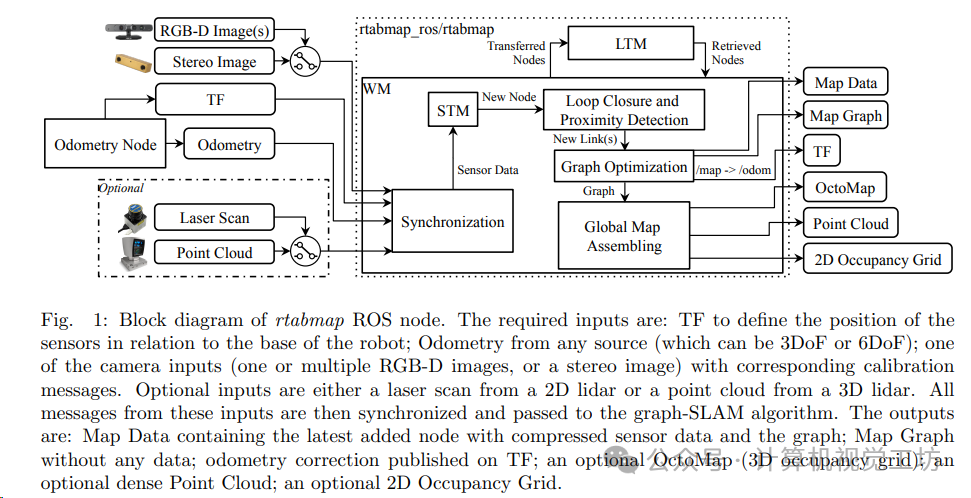
其優點在于定位精度很準,支持視覺、激光傳感器,支持跨平臺、ROS,在線處理
缺點在于魯棒性不是很好,如果建圖時間和重定位時間間隔得比較久,或者光線變化都很明顯的話,重定位會失敗。而且點云網格化用possion重建,不是主流的TSDF,速度會慢。
項目地址:https://introlab.github.io/rtabmap/
代碼獲取地址:https://github.com/introlab/rtabmap
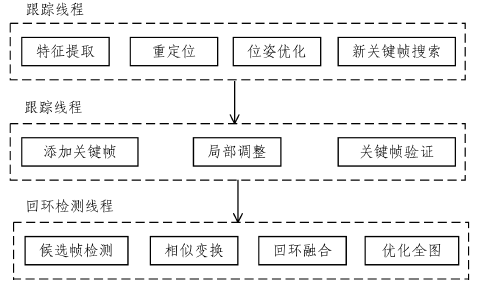
4.ORB-SLAM3
在前作ORB-SLAM2的基礎上,大佬于2020年7月開源了ORB-SLAM3的論文和源碼。ORB-SLAM3支持的設備和功能更多,支持單目、雙目、RGB-D相機,針孔、魚眼,視覺慣性里程計,多地圖等,幾乎覆蓋了視覺SLAM各個分支。總體來說,ORB-SLAM3基本框架、代碼結構都是ORB-SLAM2的延伸,但是加入了很多新的方法,實現了更好的效果。
主要系統架構如下圖所示:
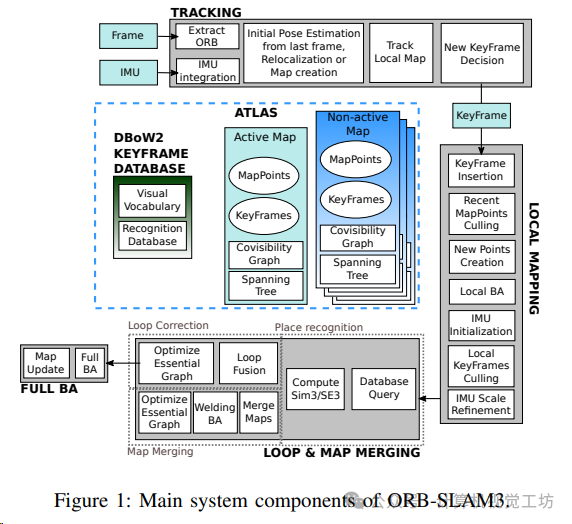
論文獲取地址:https://arxiv.org/pdf/2007.11898.pdf
審核編輯:黃飛
-
機器人
+關注
關注
211文章
28641瀏覽量
208399 -
gpu
+關注
關注
28文章
4774瀏覽量
129351 -
SLAM
+關注
關注
23文章
426瀏覽量
31928 -
激光雷達
+關注
關注
968文章
4025瀏覽量
190404
原文標題:室內RGB-D SLAM解決方案有哪些?
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

RGB接口靜電放電防護方案
如何去開發一款基于RGB-D相機與機械臂的三維重建無序抓取系統
幾種典型的SLAM應用場景和它的解決方案
基于RGB-D圖像物體識別方法
結合背景與前景的RGB-D圖像顯著性檢測模型

基于UWB、里程計和RGB-D融合的室內定位方法
用于SLAM的神經隱含可擴展編碼
用于快速高保真RGB-D表面重建的神經特征網格優化的GO-Surf
基于RGB-D相機的三維重建和傳統SFM和SLAM算法有什么區別?

瞄準AGV/AMR領域-維感科技發布高性價比RGB-D ToF相機DS86/87

一個動態環境下的實時語義RGB-D SLAM系統

一種基于RGB-D圖像序列的協同隱式神經同步定位與建圖(SLAM)系統






 工商網監
工商網監
評論