 FreeRTOS任務調度器的三種調度算法講解(下)
FreeRTOS任務調度器的三種調度算法講解(下)
2.配置調度算法
2.2
不帶時間片的搶占式調度
配置如下時,調度算法就會變成不帶時間片的搶占式調度
configUSE_PREEMPTION 1
configUSE_TIME_SLICING 0
和前面的唯一區別就是相同優先級的任務之間不會隨時間自動切換。
如果不使用時間片,那么調度程序只會在發生這兩種情況時,進行任務切換:
1
優先級更高的任務進入“就緒”態。
2
運行態任務變為阻塞態或被掛起。
很顯然,不使用時間片時,任務切換的情況會變少,所以關閉時間切片可以減少調度器的處理開銷。但是關閉時間切片也可能導致具有相同優先級的任務獲得的處理時間相差很大。因此,一定要慎重使用。
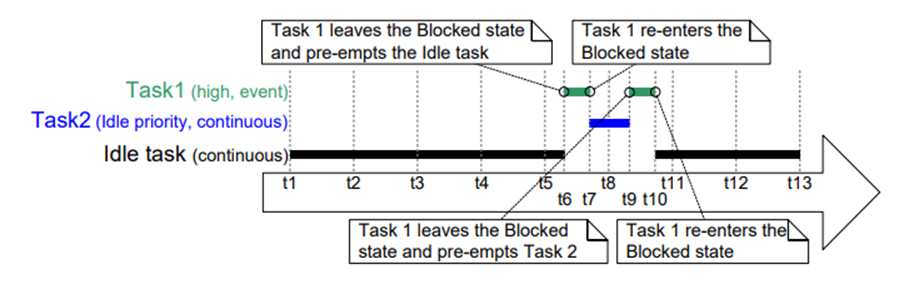
task1為最高優先級的事件驅動任務,task2和Idle task有相同的優先級。但是由于關閉了時間片,任務切換只會在空閑任務阻塞或者掛起或者task1搶占后發生,所以空閑任務和task2雖然優先級相同,但是明顯空閑任務占有的時間長很多。
2.3
協同調度
configUSE_PREEMPTION 0
configUSE_TIME_SLICING 隨便
當使用協同調度時,只有當運行態任務進入阻塞態,或者運行態任務通過調用taskYIELD()主動讓出,才會發生任務切換。
任務永遠不會被搶占,不能使用時間片,時間片配置的值隨便,無所謂。
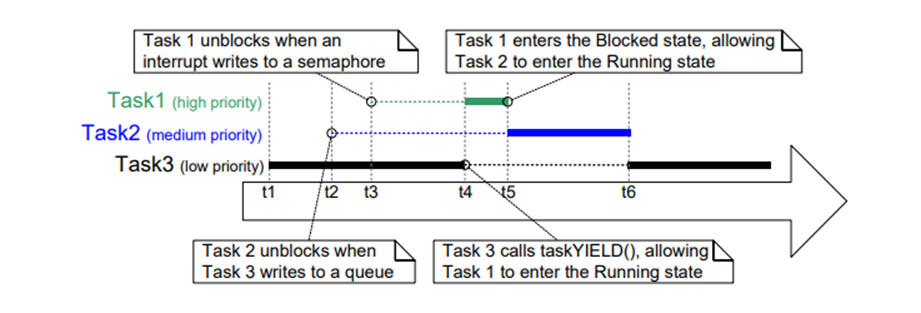
task1、2、3優先級依次變低,剛開始task3運行,雖然task1和2優先級高,并且沒有阻塞,但是也無法搶占,task3調用taskYIELD(),主動讓出,因為task1優先級比task2高,task1就運行了,task1運行夠了進入阻塞態,由于task2比task3優先級高,task2就運行了。
2.4
優缺點
多任務訪問問題
在多任務程序中,應用程序編寫人員必須注意一個資源不能被多個任務同時訪問,因為同時訪問可能會破壞資源。例如,考慮以下場景,其中正在訪問的資源是UART(串口)。兩個任務是向UART寫入字符串,任務1寫“abcdefghijklmnop”,任務2寫“123456789”:
1
Task 1處于運行態,開始寫它的字符串。它將“abcdefg”寫入UART,然后離開運行態。
2
Task 2進入運行態,并在離開運行態之前向UART寫入“123456789”。
3
任務1重新進入運行態,并將其字符串的剩余字符寫入UART。
在該場景中,實際寫入UART的內容是“abcdefg123456789hijklmnop”。Task 1寫入的字符串沒有按照預期的連續順序寫入UART,而是被損壞了,因為Task 2寫入UART的字符串出現在UART中。
通常,使用協同調度比使用搶占調度更容易避免同時訪問引起的問題。
當使用搶占式調度時,運行狀態任務可以在任何時候被搶占,包括當它與另一個任務共享的資源處于不一致狀態時。正如剛才UART示例所演示的,讓資源處于不一致的狀態可能導致數據損壞。
當使用協同調度時,應用程序編寫人員控制何時可以切換到另一個任務(干完想干的再阻塞,或者讓出)。因此,應用程序編寫人員可以確保在資源處于不一致狀態時不會發生切換到另一個任務的情況。在上面的UART示例中,應用程序編寫人員可以確保Task 1在將其整個字符串寫入UART之前不會離開運行態,這樣做可以消除字符串被另一個任務的激活破壞的可能性。
很明顯,協同調度比搶占調度響應要慢。
當使用協同調度時,最高優先級任務進入就緒態時并不一定會立即執行,必須等到運行態任務進入阻塞態或調用taskYIELD()才會被執行。
使用搶占調度時,當一個比運行態任務優先級更高的任務進入就緒態時,這個任務會立即執行。這一點對于必須在一定時間內響應高優先級任務的實時系統是非常重要的。至于多任務訪問問題(其實也就是操作系統中的多線程問題),有其他手段去解決。
在RZ/T2L上做的實驗
如果兩個參數設置為:configUSE_PREEMPTION =0,configUSE_TIME_SLICING= 0或者1(隨便) 稱之為協同調度,當使用協同調度時,只有當運行態任務進入阻塞態,或者運行態任務通過調用taskYIELD()主動讓出,才會發生任務切換。
任務永遠不會被搶占,不能使用時間片,時間片配置的值隨便。我做了一個實驗截圖如下:

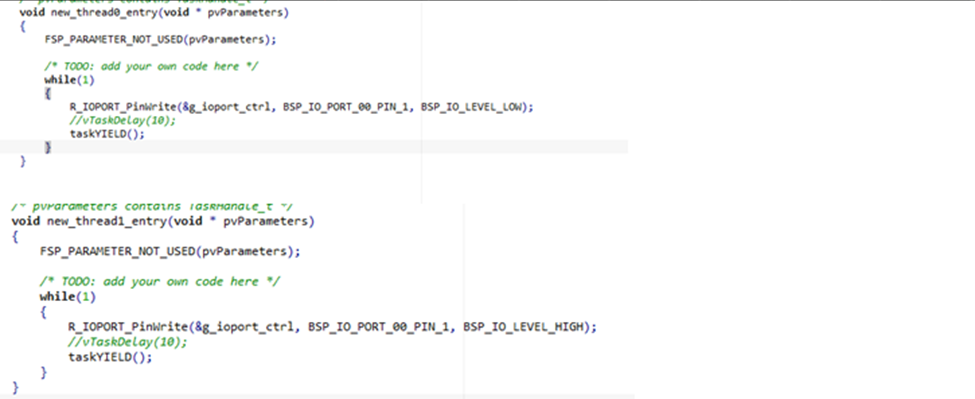
上面的實驗說明 “只有當運行態任務進入阻塞態,或者運行態任務通過調用taskYIELD()主動讓出,才會發生任務切換”,此時與時間片1 ms已經沒有什么關系了。
如果兩個參數設置為 configUSE_PREEMPTION =1,configUSE_TIME_SLICING=1, 此時只有兩個任務并且優先級相同,每個任務都持續做一件事情就會出現時間征為1ms的輪轉情況:

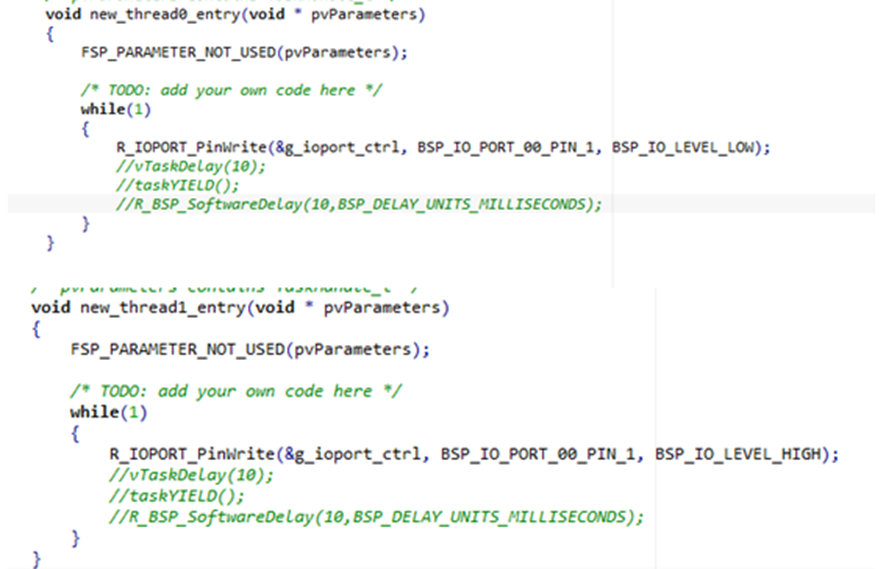
通過上面的兩個實驗可以說明,時間片存的意義是相同優先級并且持續時間較長的處理任務,需要平等分享CPU使用權。但是如果一旦有一方主動放棄CPU或者阻塞或者更高優先級任務來了,調度器是不會等待一個時間片完全結束,再去調度就緒列表中的任務的,而是直接調用就緒列表里的第一個任務。這樣的設計我認為是合理的,如果一定要等待時間片結束,是存在嚴重的資源浪費的。
審核編輯:劉清
-
FreeRTOS
+關注
關注
12文章
484瀏覽量
62329 -
UART接口
+關注
關注
0文章
124瀏覽量
15331 -
中斷優先級
+關注
關注
0文章
22瀏覽量
9394 -
調度器
+關注
關注
0文章
98瀏覽量
5277
原文標題:FreeRTOS任務調度器的三種調度算法和在RZ/T2L上的實踐(下)
文章出處:【微信號:瑞薩MCU小百科,微信公眾號:瑞薩MCU小百科】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

FreeRTOS如何使用delay作為系統延時、任務調度
調度器的原理及其任務調度代碼實現
FreeRTOS時間片進行任務調度?







 工商網監
工商網監
評論