") 高分工作!Uni3D:3D基礎大模型,刷新多個SOTA!
高分工作!Uni3D:3D基礎大模型,刷新多個SOTA!
我們近期的工作:3D視覺大模型Uni3D在ICLR 2024的評審中獲得了688分,被選為Spotlight Presentation
在本文中,我們第一次將3D基礎模型成功scale up到了十億(1B)級別參數(shù)量,并使用一個模型在諸多3D下游應用中取得SoTA結(jié)果。代碼和各個scale的模型(從6M-1B)均已開源,歡迎大家關注和使用:
論文:https://https://arxiv.org/pdf/2310.06773
代碼:https://https://github.com/baaivision/Uni3D

我們主要探索了3D視覺中scale up模型參數(shù)量和統(tǒng)一模型架構的可能性。在NLP / 2D vision領域,scale up大模型(GPT-4,SAM,EVA等)已經(jīng)取得了很impressive的結(jié)果,但是在3D視覺中模型的scale up始終沒有成功。我們旨在將NLP/2D中scale up的成功復現(xiàn)到3D表征模型上。

在這項工作中,我們提出了一個3D基礎大模型Uni3D,直接將3D backbone統(tǒng)一為ViT(Vision Transformer),以此利用豐富和強大的2D預訓練大模型作為初始化。Uni3D使用CLIP模型中的文本/圖像表征作為訓練目標,通過學習三個模態(tài)的表征對齊(點云-圖像-文本)實現(xiàn)3D點云對圖像和文本的感知。同時,通過使用ViT中成功的scale up策略,我們將Uni3D逐步 scale up,訓練了從Tiny到giant的5個不同scale的Uni3D模型,成功地將Uni3D擴展到10億級別參數(shù)。
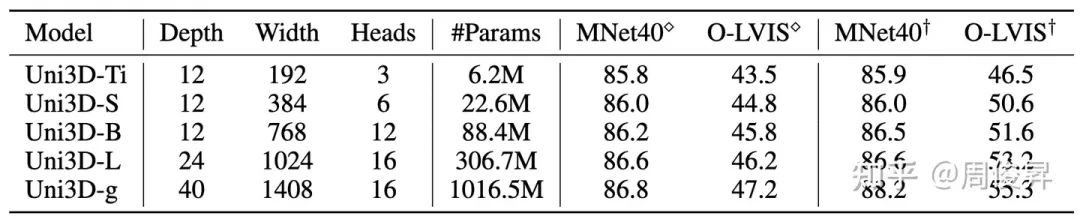
Uni3D模型不同scale下的參數(shù)量和zero-shot分類結(jié)果
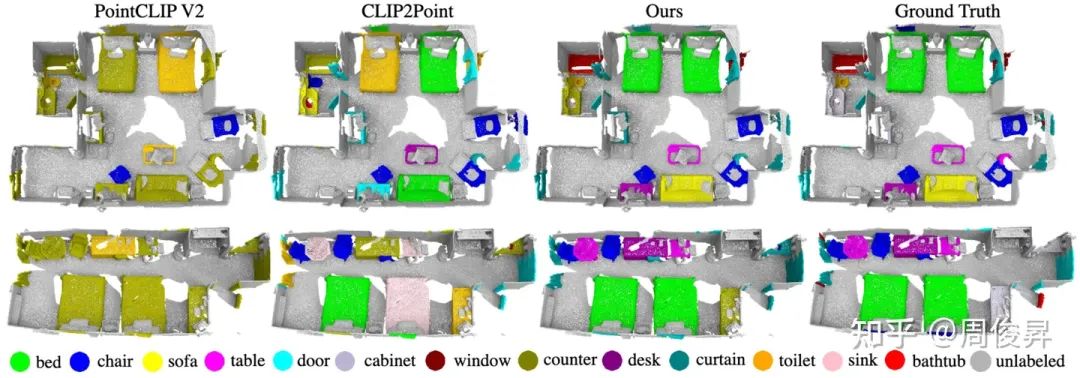
Uni3D在多個3D任務上達到SoTA,如:zero-shot classification, few-shot classification,open-world understanding, open-world part segmentation.
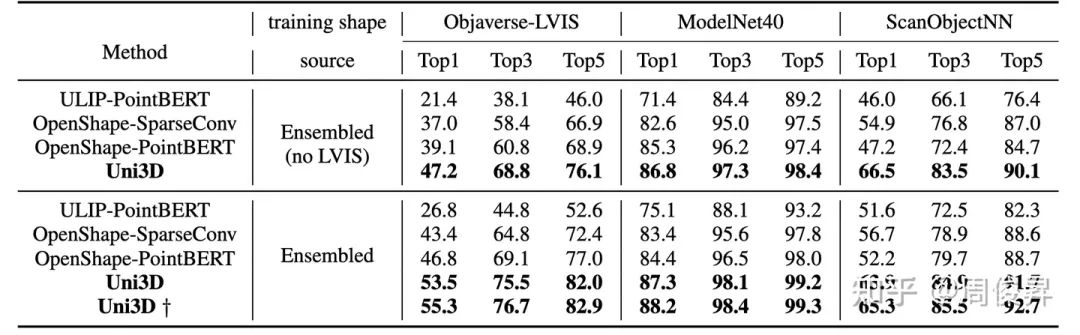
Zero-shot classification
Real-world zero-shot recognition
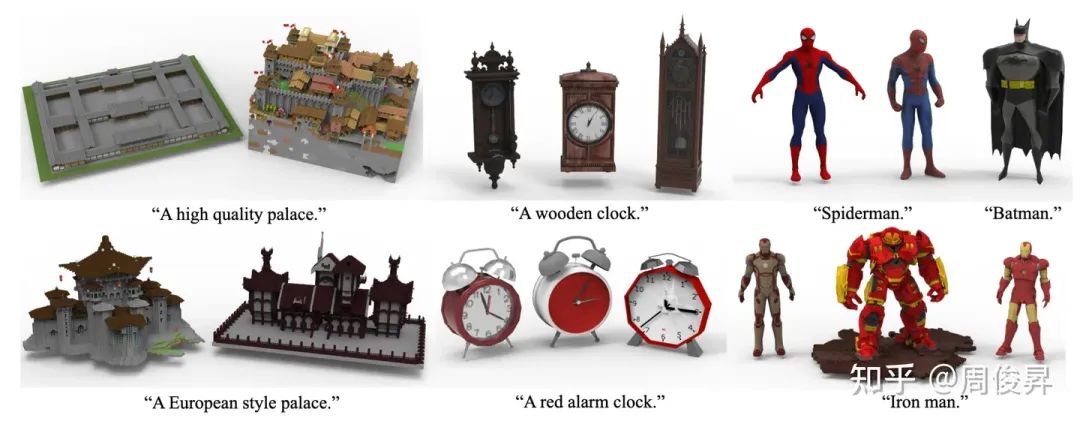
由于學到了強大的多模態(tài)表征能力,Uni3D還能夠做一些有意思的應用,如point cloud painting(點云繪畫),text/image-based 3D shape retrieval(基于圖像/文本的3D模型檢索),point cloud captioning(點云描述):
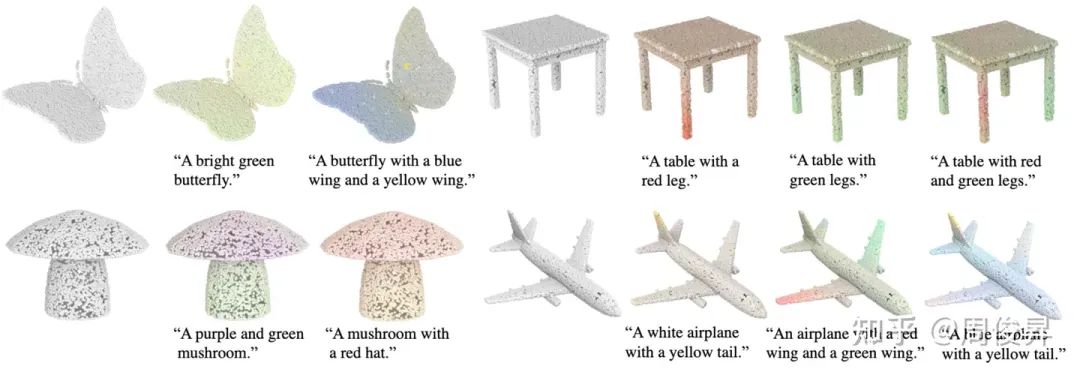
Point cloud painting
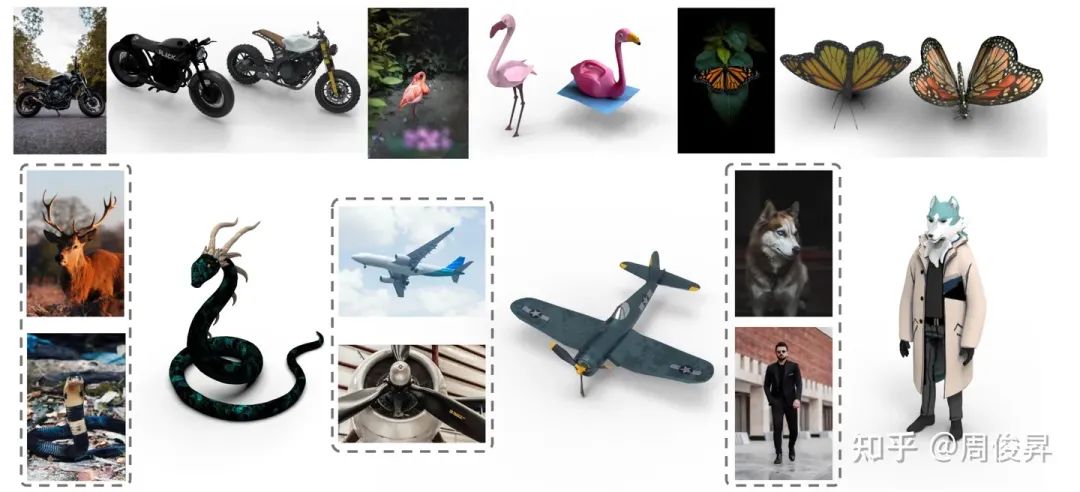
Image-based 3D shape retrieval
Text-based 3D shape retrieval

Point cloud captioning.
-
3D視覺
+關注
關注
4文章
435瀏覽量
27629 -
大模型
+關注
關注
2文章
2552瀏覽量
3175
原文標題:ICLR 2024 | 高分工作!Uni3D:3D基礎大模型,刷新多個SOTA!
文章出處:【微信號:CVer,微信公眾號:CVer】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
SciChart 3D for WPF圖表庫
騰訊混元3D AI創(chuàng)作引擎正式發(fā)布
高分子微納米功能復合材料3D打印加工介紹
騰訊混元3D AI創(chuàng)作引擎正式上線
uvled光固化3d打印技術

安寶特產(chǎn)品 安寶特3D Analyzer:智能的3D CAD高級分析工具
安寶特產(chǎn)品 3D Evolution : 基于特征實現(xiàn)無損CAD格式轉(zhuǎn)換

歡創(chuàng)播報 騰訊元寶首發(fā)3D生成應用
裸眼3D筆記本電腦——先進的光場裸眼3D技術
奧比中光3D相機打造高質(zhì)量、低成本的3D動作捕捉與3D動畫內(nèi)容生成方案
ad19中3d模型不顯示?
包含具有多種類型信息的3D模型
Stability AI推出全新Stable Video 3D模型
Stability AI推出Stable Video 3D模型,可制作多視角3D視頻
- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業(yè)應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設備
- 機器人
- 安全設備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 華秋
- 關于我們
- 投資關系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論